液壓式機械手的自動化與智能化應用
2020-10-21 01:29:08喻遠洋楊加豪榮家明胡硯順
湖北農機化 2020年16期
關鍵詞:系統
喻遠洋 彭 亮 楊加豪 榮家明 胡硯順
(湖南文理學院機械工程學院,湖南 常德 415000)
1 研究背景及意義
現代工業生產的自動化程度不斷提高,逐步與智能化和計算機網絡化管理相結合,機器人有2種,分別是工業機器人和特種機器人,它們在生產中起到的作用不一樣。特種機器人不僅可以處理易燃易爆的物品,而且還可以充當很多軍事偵察兵的角色,從而保護了人類,避免人類自身生命安全受到威脅。另一方面工業機器人不僅可以代替人工進行高強度作業,而且還能夠提高生產效率,降低人在工作時的風險。而機械手工作的關鍵部分是液壓系統。
2 目前國內外的研究現狀
國內機械手目前在工業工程的生產和制造中出現很多,尤其是工業機械設備,家用電器、汽車行業、高分子材料以及有色金屬和無色金屬的加工等工業。目前,我國的特種機器人公司科沃斯機器人,旨在研發掃地機器人、全息交流機器人這一服務類機器人,必將向著多元化方向發展。
國外機械手的發展趨勢是要大力發展機械手的高智能化以及高自動化。它裝有各種類型的傳感器,所以它們有像人類一樣的感知事物能力,并且通過傳感器來感知外面的一些信息,觀察外面的環境,反映到計算機網絡,再根據計算機程序給出的指令做出一些變化。
3 機械手總體方案的設計
工業機械手可以自動調節、運行等,并且可以根據一定的程序、軌跡以及要求模仿我們的雙手,代替人類抓取、搬運、卸下甚至其它更復雜的有關活動。科學時代一直都在進步,工業機械手可以單獨根據我們設定的程序自動往復工作,一直滿足我們的生產要求才停止。關于這次次設計內容及要求,本次機械手設計必須要具有取卸物料、傳輸物料等一系列功能。
機械手應用夾鉗式抓取機構,送放機構包括手臂、手腕、回轉臺以及液壓缸等設備。它的運動方式為球坐標式機械手,并且含有5個自由度。手腕可以抓拿物體以及進行回轉轉動,指型結構以平面的形式存在,液壓缸將活塞推動,活塞拉動杠桿夾緊其它工件。工業機械手夾持機構是機械手的關鍵部分之一,可以直接抓取工件或工具,根據我們規定的程序進行工作。工業機械手的夾持結構由于抓取工件的外形、尺寸、材料組成、質量等而種類繁多。通常來講,按照夾持工件的原理,機械手抓取機構可分為吸附和夾持。夾鉗式抓取機構包括驅動機構、傳動機構以及手指。夾持式抓取機構能適應更多的情形,可以對軸、盤或其它非標轉零件進行抓取。它的驅動機構由傳動機構來供給動力(動力源分為液壓、氣壓和電動等),傳動機構是由齒輪齒條、連桿機構、渦輪蝸桿等來完成手指緊握或者松開。平移型抓取機構平移手指來夾取平板類、方塊類以及圓柱類物料。并且在夾取直徑不相同的圓柱棒料時不會使中心軸線發生偏移。然而此類抓取機構構件比較復雜、精度必須高。而回轉型抓取機構的張開閉合由手指樞軸支點的回旋轉動來完成一系列操作。單支點回轉型樞軸只有一個支點,雙支點回轉型樞軸有2個支點。兩者相比較而言,回轉型抓取機構結構更加簡約、形狀更加精巧,不足的是抓取不同的構件會出現定位誤差。
按照設計要求以及機械手手部結構設計,該機械手夾持機構已經確定為夾鉗式雙支點回轉型機械手。
銷軸將機械手腕部和手臂相連并固定位置,用螺母鎖死一端。然后鉸鏈將腕部與液壓伸縮缸活塞桿相連,伸縮缸活塞做直線運動的時候腕部也能繞著回轉銷軸開始轉動。機械手腕部的回轉動作依靠回轉油缸操控。
機械手手臂能相對機身開始發生回轉運動,能夠繞過障礙夾送工件。機械手俯仰運動由直動式液壓缸驅動,具有工作可靠、結構簡單、性能穩定等優點。機身回轉工作臺由電動機驅動齒輪機構進行傳動,并且利用擋塊限制構件的相對運動,起到定位作用,定位誤差大于0.5mm、小于1mm。在常用的傳動機構中,齒輪傳動的傳動效率高、傳動比準確;此外在滿足使用功能、強度等條件下,齒輪傳動能夠滿足機構緊湊要求。而且,設計制造正確合理、齒輪工作可靠程度以及使用壽命更是其它機械傳動所不能比擬的。
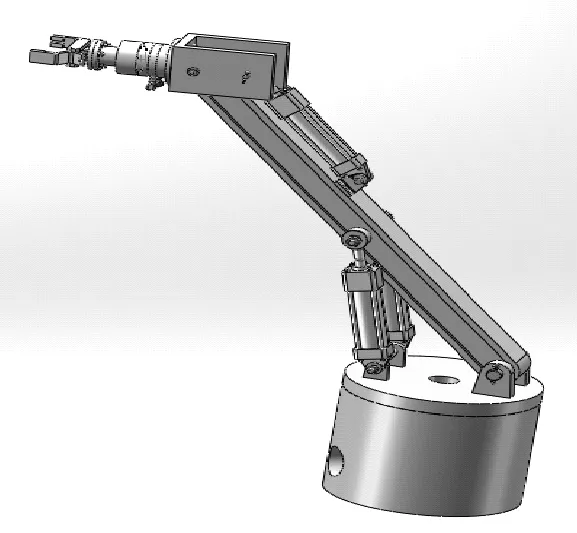
圖1 液壓機械手的三維圖
4 工業機械手的液壓系統的工作原理
本設計的機械手液壓系統具有執行、輔助、控制、動力元件和液壓油等元件。控制元件可以將時間進行操控以及液壓系統運動速度。為使機械手臂更加靈活,第一液壓傳動必須合理,第二添加電氣聯動控制來提高它的一些操控能力,第三設置手動的方式在特殊情況下隨開隨關的系統。在電氣控制的過程中,該液壓系統分為連續,單周期等一系列的工作。如下圖2液壓原理簡圖。
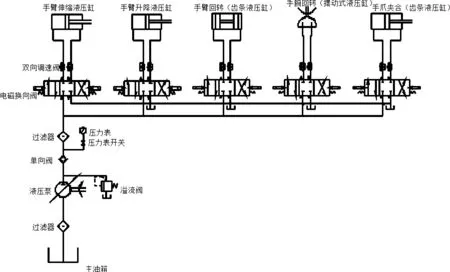
圖2 液壓原理簡圖
5 結語
此次對于機械手和液壓傳動原理的設計,對該液壓系統的分類、結構、特性、受力等方面以及液壓系統的工作原理進行分析。配有該系統的機械手機器人可以在更大的范圍內迅敏地抓取動或靜物體,靈活度更高,還可以在人類無法從事的工作環境中進行操作,從而減少了欠缺的勞動力,使生產效率提高了很多。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32