旋風銑蝸桿刀具廓形求解及系統(tǒng)設(shè)計
2020-10-21 12:11:48胡鑫陳珂李東旭楊耀凱
機械制造與自動化 2020年5期
胡鑫,陳珂,李東旭,楊耀凱
(四川大學 機械工程學院,四川 成都 610000)
0 引言
阿基米德蝸桿在端面上為阿基米德螺旋線,其軸向齒廓為直線。傳統(tǒng)加工阿基米德蝸桿的方法為:在車床上用直線刀刃的車刀車制,且蝸桿的軸線與車刀軸線垂直,以內(nèi)聯(lián)系傳動的方式加工[1]。用這種方式加工,螺旋升角較大時,加工難度大,且加工效率低。如今,絕大部分蝸桿加工采用旋風銑削的方式,采用該方式加工首先是加工效率高,是傳統(tǒng)加工方法的幾倍甚至幾十倍;其次是加工精度提高,采用一刀成型,且偏心切削時不需退刀[2];旋風銑削加工在一定角度范圍內(nèi)進行,螺旋升角可以有一定的調(diào)整,因此擴大了切削范圍。但旋風銑削加工方式破壞了蝸桿的成型理論,蝸桿軸線與刀具軸線成一螺旋升角,若按照蝸桿軸向截面的齒槽廓形設(shè)計刀具廓形,必然在加工過程中會產(chǎn)生過切現(xiàn)象[3],導致蝸桿尺寸與標準尺寸產(chǎn)生偏差。本文利用標準的阿基米德螺旋面與刀具刃口線求交,解算零干涉刃口線并以直線刃代替曲線刃,反解刀具的前刀面廓形;結(jié)合標準DXF文件的二維圖形數(shù)據(jù),以VB.NET為工具,建立高效的旋風銑削刀具智能交互系統(tǒng)。
1 旋風銑削刀具廓形設(shè)計
1.1 工件坐標系建立
以任意阿基米德蝸桿軸截面齒根圓對應(yīng)的齒槽中點為原點,z軸方向為蝸桿軸線方向,y軸方向為垂直于蝸桿軸截面的方向,如圖1所示,建立工件坐標系。
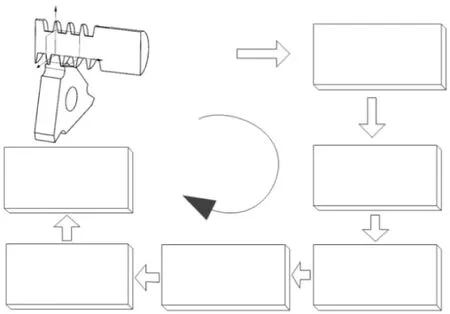
圖1 旋風銑系統(tǒng)研究流程
1.2 刃口線與螺旋面的交點求解
刀具旋轉(zhuǎn)γ后與蝸桿螺旋面的嚙合線為空間曲線,若使旋風銑刀具的側(cè)刃口線與蝸桿螺旋面嚙合的曲線保持一致[4],則提升了刀具的加工難度。為方便刀具加工,且保證蝸桿在節(jié)圓處的配合精度,因此求解刀具在蝸桿節(jié)圓處刃口線與蝸桿螺旋面的交點,刀具左右兩側(cè)交點連線所形成的刃口線即滿足蝸桿節(jié)圓處的配合要求。如圖2所示,以下通過單頭阿基米德蝸桿螺旋面與刀具在蝸桿節(jié)圓處刃口線(以下簡稱節(jié)圓刃口線)的左側(cè)交點求解為例。
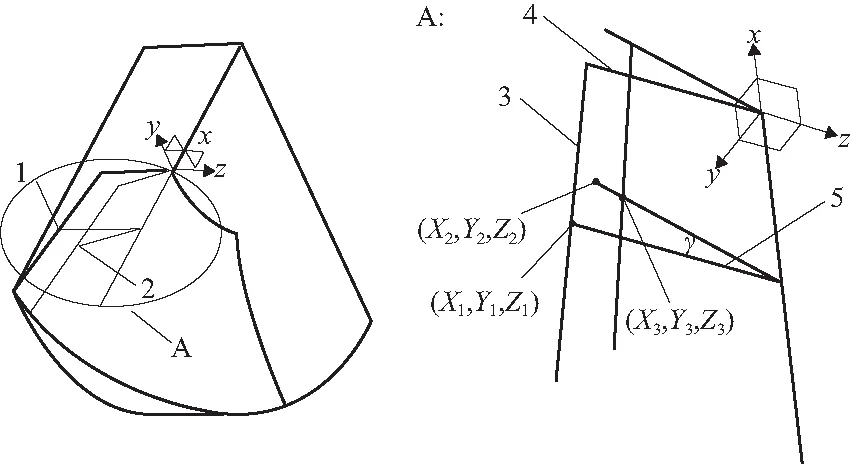
1—刀具旋轉(zhuǎn)γ前的前刀面廓形;2—刀具旋轉(zhuǎn)γ后的前刀面廓形; 3—側(cè)刃口線;4—主刃口線;5—節(jié)圓刃口線。 圖2 刃口線求交示意圖
在圖1所示工件坐標系中,刀具旋轉(zhuǎn)前的節(jié)圓刃口線左端點的坐標為(X1,Y1,Z1),計算公式如下:
(1)
式中:R1為蝸桿節(jié)圓半徑;r為蝸桿齒根圓半徑;Ld為刀具旋轉(zhuǎn)前的節(jié)圓刃口線長度。
刀具前刀面廓形x軸為回轉(zhuǎn)軸線并沿著順時針方向旋轉(zhuǎn)一個螺旋升角γ,旋轉(zhuǎn)后的節(jié)圓刃口線左端點的坐標為(X2,Y2,Z2),計算公式如下:
(2)
(3)
式中γ為螺旋升角。
刀具旋轉(zhuǎn)一個螺旋升角γ后,節(jié)圓刃口線與蝸桿螺旋面相交;解算該相交模型,實則是求解已知直線方程的空間直線與已知參數(shù)的空間螺旋線的求交問題。簡化該相交模型,如圖3所示。圖3(a)為圖2所示相交模型中徑向方向抽象出的數(shù)學模型,圖3(b)為圖2所示相交模型中軸向方向抽象出的數(shù)學模型,計算公式如下:
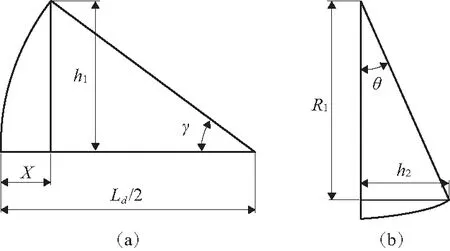
圖3 數(shù)學模型求解
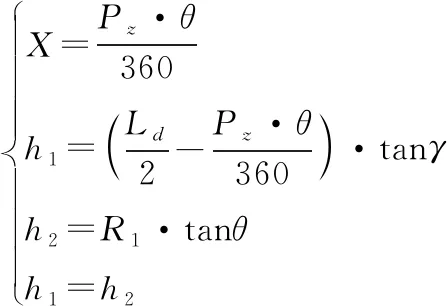
(4)
式中:Pz為螺旋線導程;θ為螺旋線從軸截面到交點處旋轉(zhuǎn)的角度;X為螺旋線從軸截面旋轉(zhuǎn)到交點,在軸線方向的投影距離;h1、h2為螺旋線從軸截面旋轉(zhuǎn)到交點,在y軸方向的投影距離。
聯(lián)立求解方程組(4),得出一三角超越方程如下:
(5)
式(5)無法通過初等數(shù)學知識求解,需采用數(shù)值方法計算。在精度要求范圍內(nèi),利用數(shù)值二分法近似求解螺旋線從軸截面到交點處旋轉(zhuǎn)的角度θ;在迭代計算中,設(shè)置二分法的收斂闕值為0.000 01,搜索函數(shù)為:
(6)
通過多次迭代計算,求解出θ,即旋轉(zhuǎn)后的節(jié)圓刃口線與螺旋面的交點坐標為(X3,Y3,Z3)。由于左右兩側(cè)螺旋面呈對稱分布,故旋轉(zhuǎn)后刃口線的長度為交點到坐標原點距離的2倍,計算公式如下:
(7)
(8)
式中Ld1為刀具旋轉(zhuǎn)后在蝸桿節(jié)圓處的刃口線長度。
刀具旋轉(zhuǎn)后在蝸桿節(jié)圓處的刃口線長度Ld1求解后,根據(jù)刀具廓形的成型原理以及蝸桿的參數(shù)推導公式,可計算出刀具前刀面廓形的所有坐標,具體公式見4.1節(jié)。
2 刀具廓形二維數(shù)據(jù)信息智能交互
DXF文件作為AUTOCAD軟件與外界數(shù)據(jù)交換的接口,文件包含了刀具設(shè)計尺寸的所有信息,通過高級語言可讀取DXF文件中的“組碼”數(shù)據(jù),獲取AutoCAD圖形的所有信息并可直接用于制造端[5]。根據(jù)生產(chǎn)加工需求的不同,設(shè)計人員設(shè)計的刀具形狀各異,但通常情況下刀具的輪廓形狀由直線和圓弧組合而成,一般不以樣條曲線作為刀具輪廓。因此,該系統(tǒng)僅針對由直線和圓弧組成的刀具輪廓進行分析、研究,對樣條曲線不作具體分析[6]。
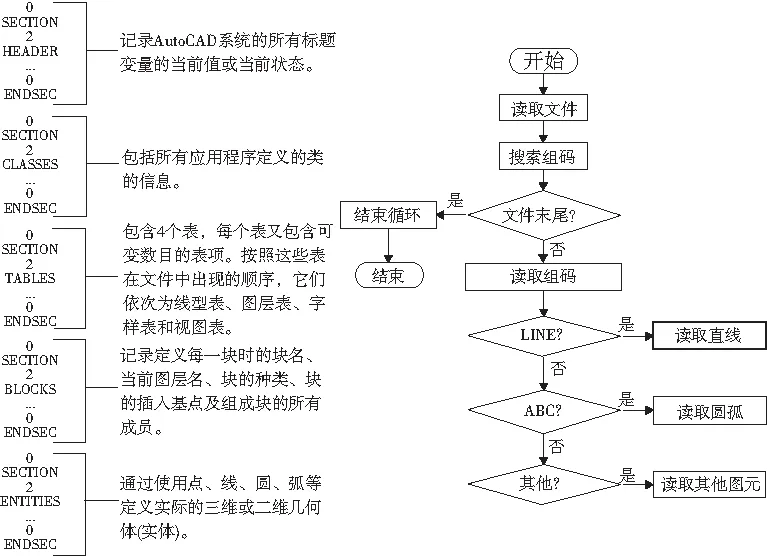
圖4 DXF文件結(jié)構(gòu)及圖元讀取流程圖
設(shè)計人員設(shè)計的刀具輪廓為二維平面圖形,因此在上位機讀取圖元數(shù)據(jù)信息時不提取各圖元的z坐標值。如表1和表2所示,在DXF文件中對直線的描述通過下述方式: “AcDbline”作為直線的組碼,在“AcDbline”后的組碼10后存放直線的起點x坐標,在組碼20后存放直線的起點y坐標,在組碼11后存放直線終點的x坐標,在組碼21后存放直線終點的y坐標。對圓弧的描述通過下述方式:以“AcDbCircle”作為圓的組碼,在“AcDbCircle”后的組碼10后存放圓弧圓心的x坐標,在組碼20后存放圓弧圓心的y坐標;以“AcDbArc”作為圓弧組碼,在“AcDbArc”后的組碼40后存放圓弧的半徑值,在組碼51后存放圓弧的起始角度值,在組碼52后存放圓弧的終止角度值。
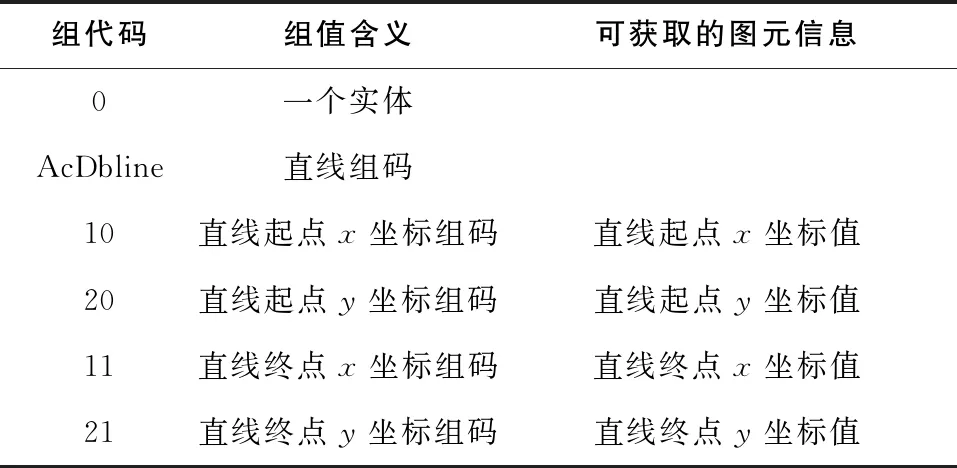
表1 表征一條直線的實體數(shù)據(jù)
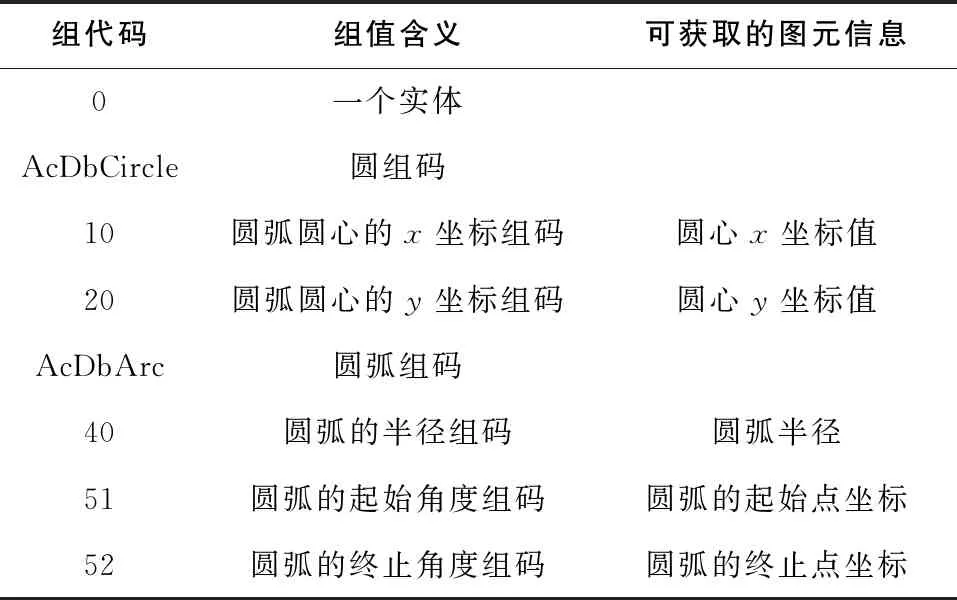
表2 表征一段圓弧的實體數(shù)據(jù)
已知DXF文件中直線和圓弧的組碼值與數(shù)據(jù)存放格式,在上位機中利用讀取文本文件的方式將DXF文件中的數(shù)據(jù)通過讀取行數(shù)據(jù)的方式讀入計算機中,當讀取至相應(yīng)的組碼時記錄下組碼相應(yīng)的圖元數(shù)據(jù)信息。刀具設(shè)計文件讀取結(jié)束后,圖形文件中的各直線起點坐標(Xis,Yis)與直線的終點坐標(Xie,Xie)均已存入上位機中存放直線數(shù)據(jù)的變量中(i為直線的數(shù)量);圖形文件中各圓弧的原點坐標(Xj,Xj)、圓弧的半徑γj及各圓弧的起始角度δjs和終止角度δje均存入相應(yīng)的變量中(j為圓弧的數(shù)量)。至此,可得到刀具設(shè)計特征數(shù)據(jù)中各個圖元的信息,包括直線的數(shù)量、各條直線的起始點坐標以及圓弧的數(shù)量、圓弧的圓心坐標、圓弧的起止點坐標、圓弧的類型等信息。
3 旋風銑刀具系統(tǒng)設(shè)計
VB.NET作為工業(yè)領(lǐng)域常用的上位軟件,除較強的計算能力外,還具有強大的UI圖像設(shè)計功能,利用Graphics類的PictureBox控件,能加載不同格式的圖片于交互窗口以及根據(jù)坐標點繪制二維圖像,能夠滿足刀具前刀面廓形的實時繪制、顯示,并通過該軟件實現(xiàn)DXF文件的訪問、數(shù)據(jù)讀取、數(shù)據(jù)修改、保存文件等功能,實現(xiàn)旋風銑刀具系統(tǒng)的人機交互[7]。
旋風銑蝸桿刀具系統(tǒng)界面由4個版塊構(gòu)成:第1個版塊為蝸桿參數(shù),其參數(shù)值由加工人員根據(jù)加工圖樣設(shè)定,包括齒形角、軸向模數(shù)、直徑系數(shù)等參數(shù)。參數(shù)下方自動生成蝸桿軸向齒形的剖視圖,便于操作人員對各個參數(shù)值的理解;第2個版塊為示意圖,根據(jù)組成刀具廓形各個直線段的起始坐標點,利用PictureBox控件中的DrawLine函數(shù),繪制出前刀面廓形和B-B截面剖視圖;第3個版塊為刀片尺寸,包括刀片厚度、刀片長度、內(nèi)接圓直徑,其值根據(jù)蝸桿的大小選擇適當?shù)牡镀吞枺坏?個版塊為刀具參數(shù),由系統(tǒng)根據(jù)以上算法自動生成,其值可直接用于生成刀具廓形的DXF文件并用作刀具加工。
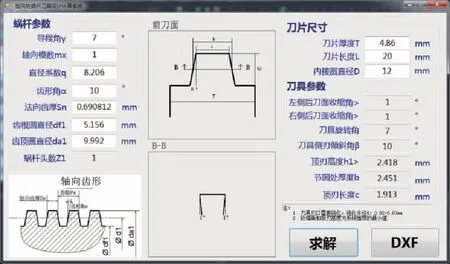
圖5 系統(tǒng)界面示意圖
4 刀具廓形三維建模與加工實例驗證
4.1 UG三維建模驗證
為判斷算法的準確性,通過UG三維建模進行驗證。驗證原理如下:已知一單頭阿基米德蝸桿的廓形參數(shù),利用UG模擬成型法加工蝸桿,再將蝸桿模型與理論蝸桿廓形尺寸進行對比,最后得出結(jié)論[8]。蝸桿參數(shù)如表3所示。
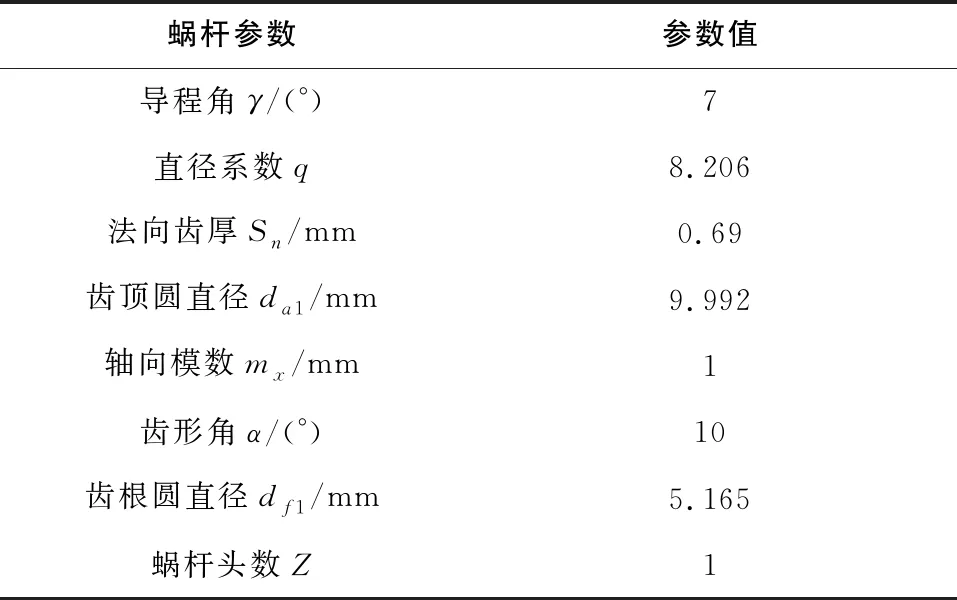
表3 蝸桿參數(shù)
使用螺旋線命令導入一螺旋線,默認矢量方向為z軸方向,旋轉(zhuǎn)角度為0°,直徑為蝸桿節(jié)圓處直徑8.206mm,螺距為3.165mm,起始長度和終止長度分別為0和15mm。
使用“插入—基準/點—基準平面”命令,選擇一角度類型,平面參考選擇z-x平面,通過x軸,角度為7°,其余為默認選項,用來模擬刀具軸線與工件軸線成一螺旋升角。
利用蝸桿參數(shù)計算出刀具的廓形坐標,計算公式如下:
(9)
(10)
式中:Sx為軸向齒厚;Sn為法向齒厚;α為齒形角;Px為齒距;Z為蝸桿頭數(shù);hf1為齒根高;hα1為齒頂高;df1為齒根圓直徑;d1為節(jié)圓直徑;dα1為齒頂圓直徑;L為刀具側(cè)刃口線長度。
在新建的基準平面上,根據(jù)以上公式計算出的刀具廓形尺寸,創(chuàng)建刀具廓形模型并沿著螺旋線掃掠,得到掃掠后的模型再與工件毛坯圓柱進行布爾求差運算,最后得到蝸桿模型,如圖6所示。
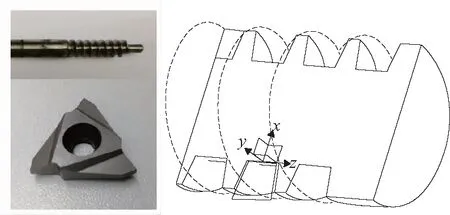
圖6 加工實物與理論驗證模型
4.2 加工實例驗證
打開系統(tǒng):第1步將上述蝸桿的各個參數(shù)輸入到蝸桿參數(shù)板塊;第2步為設(shè)置刀具尺寸參數(shù),根據(jù)蝸桿的大小選擇內(nèi)接圓為12mm、刀片厚度為4.86mm、刀片長度為
20mm的毛坯刀具;完成前兩步的設(shè)置,可進行求解運算,刀具的二維廓形圖顯示在前刀面板塊,B-B板塊繪制出其B-B向的投影視圖;完成計算后可導出刀具的DXF文件,根據(jù)DXF文件設(shè)計刀具的前刀面廓形,并加工蝸桿。結(jié)果如圖6所示。
5 結(jié)語
1) 計算結(jié)果顯示:計算所得蝸桿節(jié)圓處的軸向齒厚為0.695 1mm,三維模型中蝸桿軸向齒厚為0.694 6mm,誤差Δx=0.000 5mm,滿足該蝸桿加工的精度要求;通過求解刀具加工時在蝸桿節(jié)圓處的刃口線長度,進而求解刀具的廓形,以直線刃代替曲線刃,既保證了蝸輪蝸桿副在節(jié)圓處的配合精度,降低了刀具加工的難度,也適用于一般精度的蝸桿加工要求。
2) 對于任何阿基米德蝸桿,只要在旋風銑蝸桿刀具系統(tǒng)中輸入蝸桿和刀具的原始參數(shù)γ、mx、q、α、Sn、df1、dα1、Z1、T、L、D的數(shù)據(jù)均可直接得出刀具前刀面的廓形數(shù)據(jù)以及用于制造端交互的前刀面DXF文件。通過這種方法,既方便了刀具的設(shè)計,也提高了加工的效率。
3) 加工結(jié)果顯示:加工后的蝸桿在節(jié)圓處滿足其工作精度要求。
