
基于速度矢量場的無人機編隊防碰撞控制方法
2020-10-21 12:12:14張岑曹東施書成
機械制造與自動化 2020年5期
張岑,曹東,施書成
(南京航空航天大學 自動化學院,江蘇 南京 211106)
0 引言
無人機是一種無人駕駛飛行器,主要由無線電遙控或自身程序控制[1]。無人機具有適應性強、安全性好、成本相對較低、隱蔽性好等特有的優勢,在民用領域和軍事領域都受到了重用[2]。與單個無人機相比,多個無人機協同飛行可以大大提高任務執行效率,因此無人機編隊飛行控制技術受到廣泛關注。安全性是無人機編隊系統優劣的一項關鍵評價指標,所以在無人機編隊系統中加入防碰撞控制方法很有必要。
目前,在無人機編隊控制領域,出現了很多不同的隊形控制方法,常用的方法有leader-follower法、基于行為法、虛擬結構法以及圖論法等,每一種控制方法都有其優缺點。leader-follower法就是指定編隊中的一架無人機為長機,其余無人機為僚機。長機在獲得地面站發出的指令后,按照指定航跡進行飛行,其余僚機只需跟隨長機的運動狀態變化即可,包括速度變化、航向變化和高度變化[3]。相比其他方法,該方法原理簡單、可控性強、靈活性較好。
本文采用leader-follower隊形控制策略、雙向通信的的信息交互拓撲,對一架長機、兩架僚機組成的無人機編隊進行研究。針對無人機編隊過程中的機間碰撞問題,構建了速度矢量場模型,給出編隊防碰撞控制方法。根據防碰撞方法,在C#平臺上搭建了多機編隊的仿真系統,通過仿真驗證自主防碰撞控制方法的準確性和有效性。
1 基本概念
1.1 速度矢量場基本原理
Khatib 首先提出了人工勢場法,用以解決機器人和障礙物之間的自主防碰撞問題。人工勢場法的基本思想就是將被控對象的周圍環境抽象為勢能場,目標點對被控對象產生“引力”,障礙物對被控對象產生“排斥力”,被控對象在合力作用下避開障礙物,移動到目標點[4]。速度矢量場法改進了傳統的人工勢場法,用合速度代替合力驅動規劃對象向目標點運動,相比人工勢場法,具有實現容易、快速性更好等優點。
速度矢量場的基本原理就是將目標點和障礙物作為速度場源,在場源作用區域內,每一個被控對象都有一個速度矢量。無人機在合速度的作用下避開障礙物飛向目標點[5]。圖1為速度矢量場基本原理示意圖。
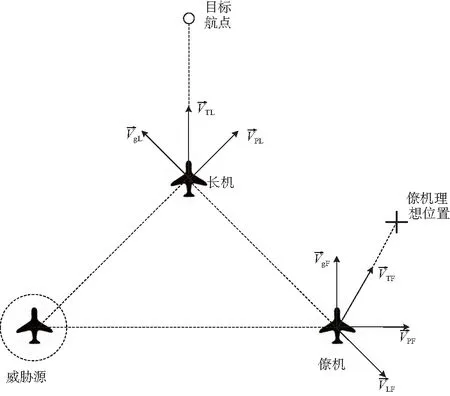
圖1 速度矢量場基本原理示意圖

由于本文未考慮地理環境、雷達等外部威脅,因此簡化了速度矢量場模型。在速度矢量場驅動下,各速度的矢量和改變了無人機的飛行軌跡,避免編隊內的機間碰撞。
1.2 信息交互拓撲結構
無人機編隊飛行過程中,只需要使用通信網絡拓撲中的部分通信鏈路進行信息交互,就可以實現編隊任務。這些被使用的鏈路的集合就構成無人機編隊的信息交互拓撲[6]。在多無人機的協同編隊過程中,各無人機之間定時相互傳遞位置、姿態信息,能夠有效避免編隊內無人機間的碰撞,圖2為本文無人機編隊的信息交互拓撲結構。
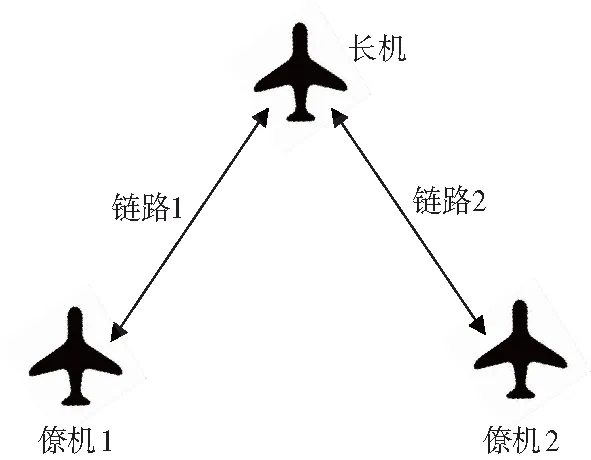
圖2 無人機編隊網絡拓撲結構圖
為了實現編隊,長機需要向次一級無人機發送經緯度、高度、速度、航向等信息。考慮到編隊的安全性,長機也需要知道僚機的狀態,因此僚機也需要向長機反饋經緯度、姿態信息,于是僚機之間可以通過長機間接收到對方的位置狀態。由于leader-follower編隊中存在位置誤差的傳遞迭代,越后面的僚機與上一級長機的位置誤差越大[7],因此無人機之間也需要傳遞位置誤差信息,以便于下一級僚機進行編隊位置修正。
2 速度矢量場建模
2.1 牽引速度模型
無人機機群穩定向目標位置飛行,是編隊控制的重要目標之一。牽引速度模型分為長機牽引速度模型、僚機牽引速度模型。
1)長機牽引速度模型

(1)

2)僚機牽引速度模型
當僚機未到達理想編隊位置時,理想編隊位置處引力場源可提供牽引速度牽引僚機飛向理想位置。僚機牽引速度的方向由僚機當前位置指向理想位置,表達式為:
(2)

2.2 規避威脅速度模型
威脅信息即是編隊中的其他無人機,為了貼合實際情況及簡化模型,威脅信息的作用區域等效為一個固定半徑的圓形,在威脅圓的作用區域內,提供規避場和導引場。顯然在無人機編隊飛行過程中,應極力避免進入相鄰無人機威脅區域。如圖3所示,將無人機等效為質點,以其所在位置為圓心、Ra為半徑的圓為警戒區域,一般情況下Ra約等于兩倍無人機翼展大小,相鄰無人機進入可能會發生碰撞。質點為圓心,Rmax為半徑的圓為威脅區域作用范圍,超過威脅半徑Rmax,不受威脅場作用,即規避速度與導引速度都為0。
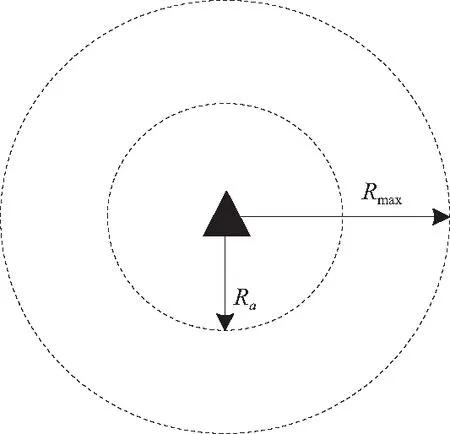
圖3 威脅區域作用示意圖
規避速度方向由威脅源中心指向無人機,將無人機推離威脅區域[8],無人機i對進入其威脅區域的無人機威脅速度表達式為:
(3)

(4)


(5)
否則導引速度表達式為:
(6)
式(5)、式(6)中R(θ)為矢量旋轉矩陣:
(7)
當無人機進入相鄰無人機的威脅區域時,規避威脅速度即是規避速度、導引速度的疊加,表達式如下:
(8)
2.3 躲避長機速度模型
在無人機編隊飛行過程中,長機的優先級較高,所以在僚機進入長機威脅區域內時,應主動避讓長機,避免無人機間碰撞事故的發生。由此便形成了躲避長機速度,方向由長機指向僚機,通過與規避威脅速度的疊加,產生的合速度使相鄰的僚機能夠及時規避長機,避免發生碰撞。躲避長機速度表達式為:
(9)

(10)
式中:k4表示僚機躲避長機速度調整參數,根據實際情況可調整;Rmax表示長機威脅區域作用半徑;b2為警戒區域半徑,其值至少為兩倍長機翼展。
2.4 合速度模型
在一般情況下,編隊飛行中的長機只需跟蹤規劃好的航跡進行自主飛行,只有當相鄰的僚機進入長機的警戒區域內時,長機才會主動避讓,所以長機規避合速度表達式為:
(11)
僚機的規避速度等于躲避長機速度與規避其他無人機速度的矢量和,表達式為:
(12)
對于編隊中所有無人機而言,導引速度合速度為:
(13)
在編隊飛行過程中,隊中無人機在合速度的作用下合理避開周圍威脅無人機,向目標點飛行,其運動軌跡為:

(14)
3 仿真驗證及分析
防碰撞控制一直是無人機編隊研究的重點和難點。本次仿真實驗以一架長機、兩架僚機組成的編隊系統為研究對象,采用長機分別與兩個僚機雙向通信的信息交互拓撲結構,在C#開發平臺上搭建仿真軟件,以驗證無人機編隊防碰撞控制方法的有效性。
在無人機編隊仿真系統中,長機與僚機1、僚機2的距離初始值都為100 m,兩架僚機的間距初始值為140 m,初始隊形為等腰三角形,威脅區域半徑均設定為80 m。圖4為無人機編隊正常起飛時的仿真系統示意圖,其中導航地圖中藍色飛機圖標0為長機,綠色飛機圖標1為僚機1,黃色飛機圖標2為僚機2,紅色航線(細實長線)為長機目標航線(本刊黑白印刷,有關疑問咨詢作者)。
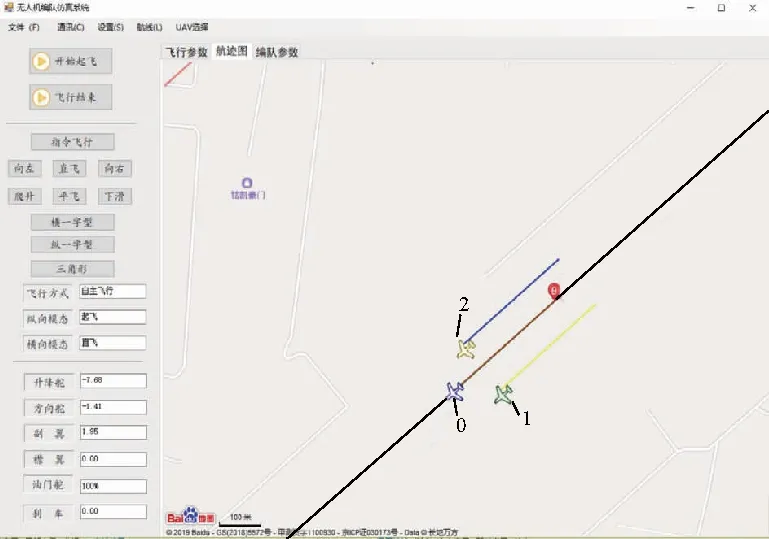
圖4 起飛時刻無人機編隊仿真系統示意圖
在無人機編隊以三角形隊形飛行過程中,某一時刻通過隊形變換將兩架僚機目標位置設為同一點,圖5為有、無防碰撞控制方法下兩僚機間距對比示意圖。
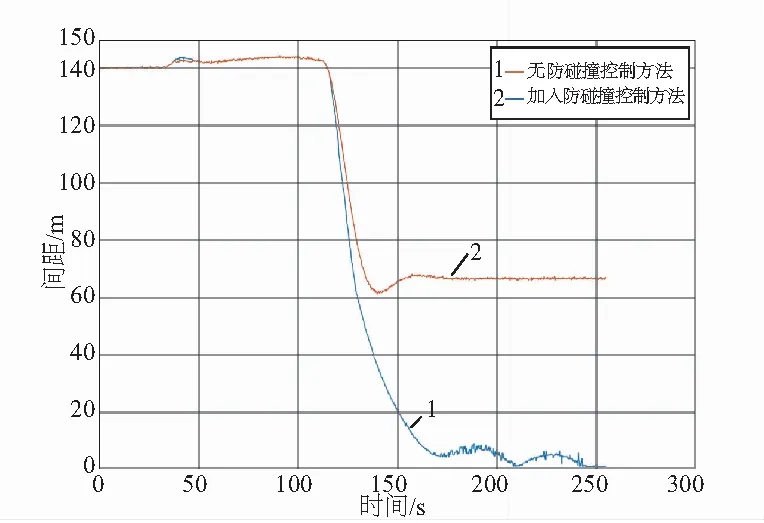
圖5 有、無防碰撞控制方法下兩僚機 間距對比圖
如圖5中1曲線所示,在仿真開始后,無人機編隊按照初始的三角形隊形飛行。在第113 s,發送控制指令進行隊形變換,將僚機1、僚機2的目標位置設置為同一點。由于仿真系統中沒有加入自主防碰撞控制方法,兩架僚機迅速進行位置調整,間距急劇減小,最終減少到0,兩架僚機發生了碰撞事故。
如圖5中2曲線所示,在點擊仿真運行后的第113 s,通過飛控指令將兩架僚機的目標編隊位置設為同一點,然后兩架僚機的間距迅速減小,在第138 s時兩架僚機的間距降到最小值61 m,不會發生碰撞。最終兩架僚機間的距離維持在66 m左右。由此可知,在防碰撞控制方法的作用下,即使兩架僚機的目標點相同,編隊系統也會進行自主調整,避免無人機間碰撞,保證編隊的安全性。
當編隊系統沒有加入防碰撞控制方法時,如圖6中1
曲線所示,仿真開始后,在第120 s點擊縱一字型編隊指令,此時僚機1減速飛向長機正后方,僚機2加速飛向長機正前方,長機與僚機2的間距越來越小,在第210 s時減少至0,長機與僚機2發生碰撞。
當編隊系統中加入防碰撞控制方法后,如圖6中2曲線所示,在第120 s發送縱一字型編隊遙控指令。在僚機2飛向長機正前方的過程中,其間距越來越小,在186 s減少至最小值43 m左右,不會發生碰撞,此時僚機2進入了長機和僚機1的威脅區域,受到長機與僚機1威脅場作用,在規避威脅速度和牽引速度之合速度作用下,僚機2到達目標點,順利完成縱一字型編隊。
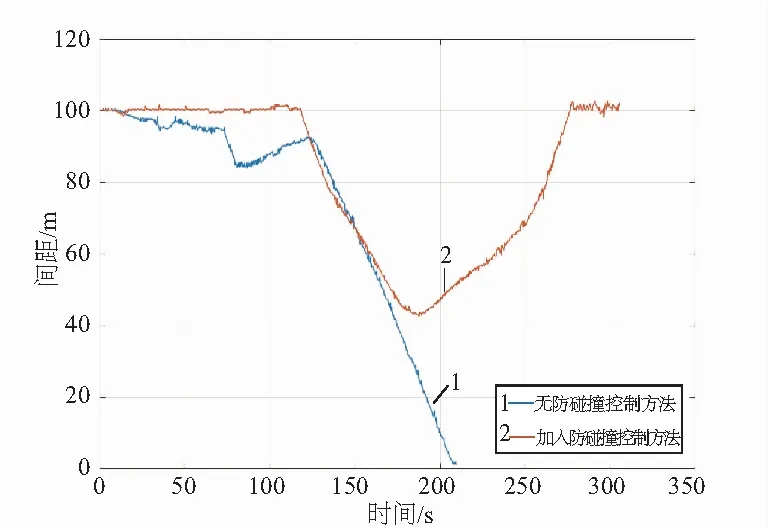
圖6 有、無防碰撞控制方法下長機與僚機2 間距對比圖
4 結語
以三架無人機組成的leader-follower編隊為研究對象,在速度矢量場法和雙向信息交互拓撲結構的基礎上,搭建了無人機編隊的速度矢量場模型,提出了編隊防碰撞控制方法,實現了無人機編隊過程中的自主防碰撞。通過仿真實驗,驗證了所提出的防碰撞控制方法的有效性,對其在工程上的應用具有一定的借鑒性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
意林原創版(2016年10期)2016-11-25 10:28:30
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
