雙輪履帶式管道機器人防側傾機構研究
2020-10-21 12:12:06劉增輝馬正闊彭磊
機械制造與自動化 2020年5期
劉增輝,馬正闊,彭磊
(河海大學 a. 機電工程學院; b. 疏浚技術教育部工程研究中心,江蘇 常州213022)
0 引言
隨著我國城市現代化建設的步伐越來越快,城市的規模不斷擴大,城市用水量不斷地增多,排水量也越來越大,下水管道管理、養護、維修及疏通等工作也越來越多。下水管道內的環境往往是狹小、復雜、危險的,傳統的人工作業通常伴隨著工人中毒、刮傷和管道破裂的風險。隨著管道機器人的不斷發展,機器人逐漸取代了人工在管道內進行養護、維修和疏通的工作[1]。
管道機器人的種類繁多,但其中最常見的是履帶式管道機器人,分為三輪式和雙輪式兩種。三輪履帶式管道機器人雖然保證了其工作的穩定性,但由于自身質量較大,且靈活性較差,所以無法通過彎管、三通等特殊管道。相比之下雙輪履帶式管道機器人的靈活性更好,但在大管徑管道行進過程中容易偏離管道中心,導致工作效率較低,且存在管道內傾覆的風險[2]。
本文針對雙輪履帶式管道機器人在管道中運動不穩定、容易側傾的問題,設計了一種主動防側傾裝置,可以盡早地糾正機器人在管道內工作的姿態,實現雙輪履帶式管道機器人的平穩作業。
1 履帶式管道機器人結構設計
1.1 履帶式管道機器人三維模型建立
基于目前主流的雙輪履帶式機器人的外形設計,利用SolidWorks三維建模軟件對雙輪履帶式管道機器人外形進行建模,模型如圖1所示。模型主要包括機器人的主體裝置、行走裝置和防側傾裝置3個部分。主體裝置包括為行走裝置、為防側傾裝置提供能量的動力源和裝有控制電路的電子艙;行走裝置包括支撐、安裝機器人主體裝置的負重輪和支撐架,其可以通過控制兩邊履帶的轉速、轉向做到小半徑轉向甚至原地轉向。防側傾裝置是為了保證
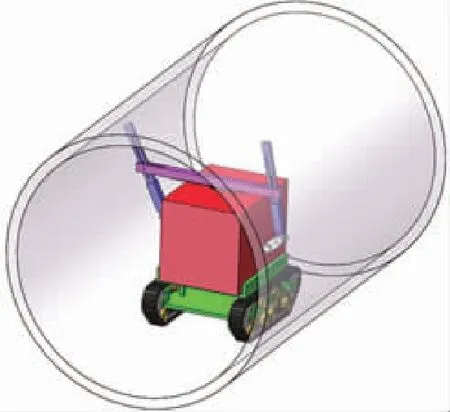
圖1 雙輪履帶式管道機器人 三維模型
管道機器人在復雜管道環境下工作的穩定性,安裝在管道機器人主體裝置的上方。本文所設計的管道機器人主要技術參數如表1所示。

表1 管道機器人主要技術參數
1.2 防側傾裝置以及傳動系統設計
管道機器人在管道內工作時,一方面管道底部淤積物的高低不平會導致履帶傾斜;另一方面移動過程中電纜放線時所產生的附加扭轉力矩也會破壞履帶配置平衡,進而造成履帶逐漸偏離正常行進軌跡,呈現出圖2所示的側傾狀態。側傾嚴重時,工作效率低,工作可靠性差,且存在傾覆造成機器損壞的風險。為了避免此類情況發生,需要在機器人產生較小偏離角時啟動防側傾裝置,通過防傾桿與管壁接觸的反作用力將機器人推回到管道中心來保證其工作的穩定性[3]。
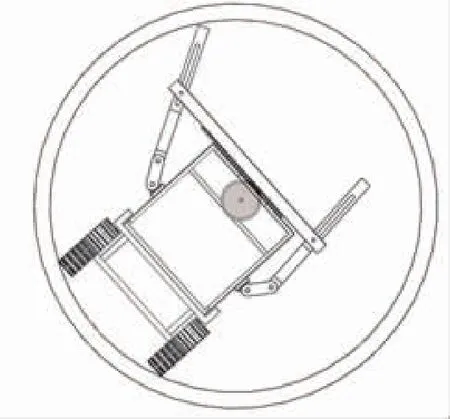
圖2 雙輪履帶式管道機器人 側傾狀態示意圖
防側傾裝置安裝在履帶式管道機器人的上方,其結構如圖3所示,主要由驅動電機、齒輪、齒條、水平導軌、防傾桿及可調支座等組成。可調支座通過雙頭銷軸將防傾桿固定在機器人主體裝置兩側。驅動電機與齒輪相連,齒輪與齒條嚙合,從而帶動水平導軌水平運動。防傾桿上部有滑槽,通過銷軸與水平導軌固定,因此當水平導軌運動時,會帶動防傾桿內外收放,以適應不同管徑的工作環境。
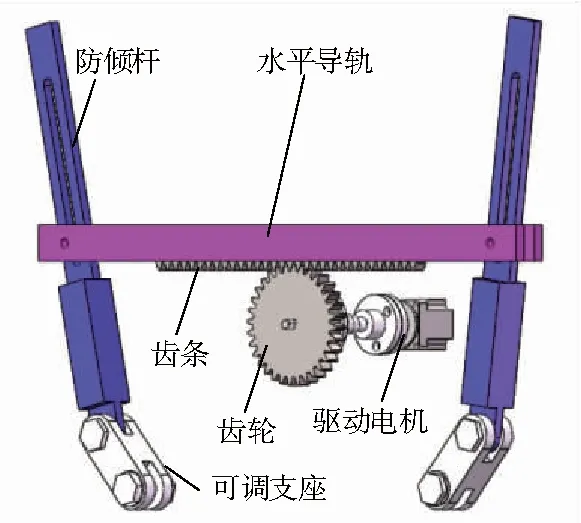
圖3 防側傾裝置結構圖
1.3 防側傾裝置不同管徑適應性
城市管道多數采用PE管,這類管材常被用于市政工程管道的建設,主要用于生活飲用水供給管道、污水處理管道等。因為其耐高壓、耐磨、耐高溫、防酸耐腐蝕、質量輕、方便安裝與移動等特點,所以是管道建設的較好選擇[4]。
PE材料按照國際統一的標準可以劃分為5個等級:PE32級、PE40級、PE63級、PE80級和PE100級,其中PE100級有著更好的抗壓能力、更薄的管壁和更長的使用壽命,所以PE100級的使用范圍更廣。PE100級別管道的尺寸規格標準如表2所示[5-6],表中規格系列SDR數值表示公稱外徑與公稱壁厚的比值,其表示不同壓力,對應不同壁厚。
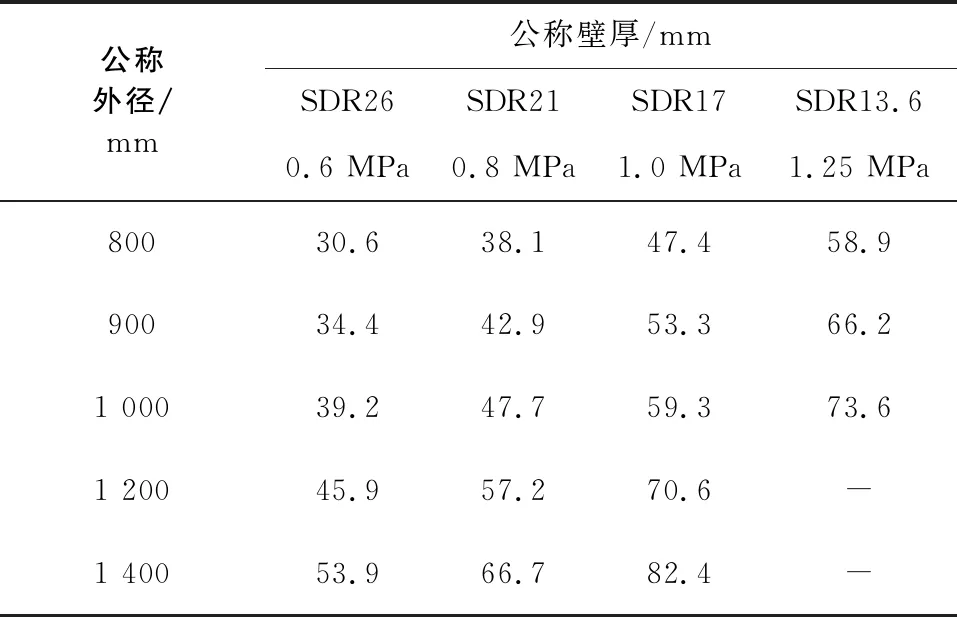
表2 PE100級別管道的尺寸規格
如圖4所示,為了增大管道機器人的適應范圍,通過調節零部件可調支座的安裝角度,即可在一定范圍內不同直徑的管道實現,而不需要額外改變防傾桿、水平導軌等其他零部件的尺寸,操作便捷,適應性強。
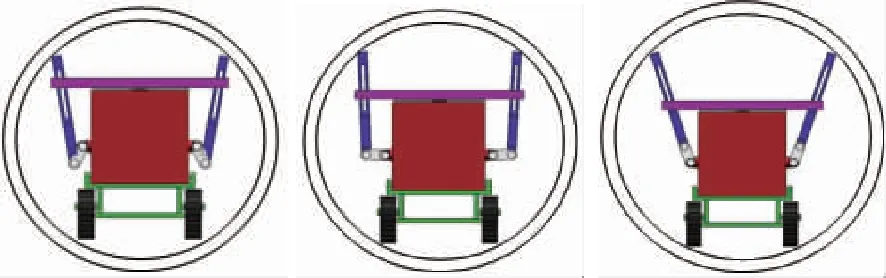
圖4 適應不同直徑管道示意圖
1.4 履帶式管道機器人受力分析
履帶式管道機器人受力分析如圖5所示。在履帶式管道機器人側傾初期(圖5(a)),雙側履帶均受力,取其截面進行受力分析。履帶受力點分別定義為點A和B,管道中心為點O,機器人質心為點M,機器人垂直中心線MK與重力的夾角定義為側傾角θ,質心M與中心點O的水平距離定義為l1,管道半徑定義為R。履帶受力點A、B承受管壁支撐力NA、NB及管壁摩擦力fA、fB,質心M承受重力G。對管道中心點O求力矩,可得:
TO=fA·R+fB·R+G·l1
(1)
經過分析可知,O點所受力矩TO為逆時針方向,表明履帶式管道機器人側傾初期,在外力不加劇傾斜的情況下,依靠自身重力可逐步調整至管道中心,實現自動糾偏。
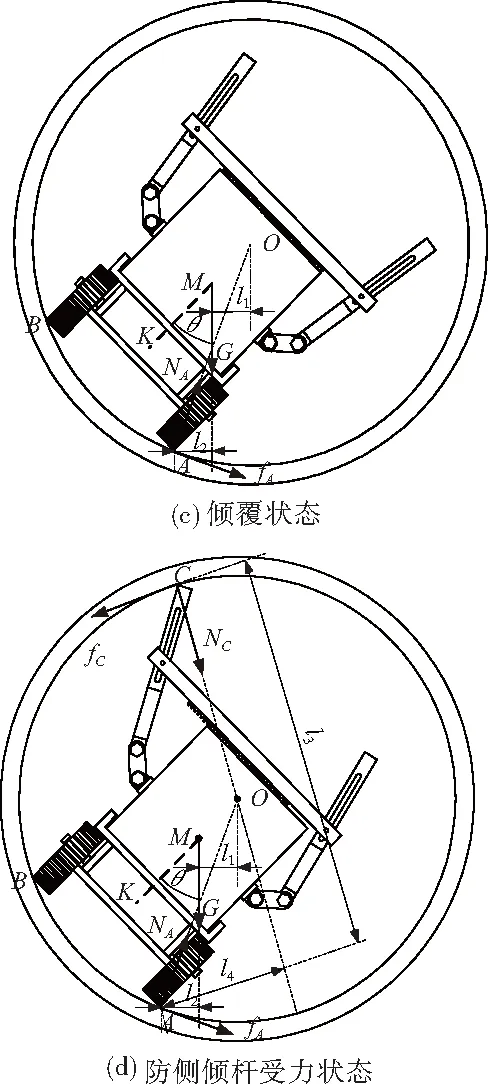
圖5 履帶式管道機器人受力 分析圖
但如果管道機器人繼續傾斜,當∠KMA=∠θ(重力方向與MA共線),管道機器人達到側傾臨界點(圖5(b)),此時履帶上點B處于不受力狀態,只有點A承受支撐力和摩擦力。對點A求力矩,可得點A處的力矩為0,表明下一階段如果側傾角繼續增大,將打破臨界平衡,履帶機器人進入傾覆狀態(圖5(c))。此時,對履帶A點求力矩,可得:
TA=G·l2
(2)
經過分析可知,A點所受力矩TA為順時針方向,表明履帶式管道機器人將沿著履帶邊順時針傾覆。針對圖5(c)所示傾覆狀態,如果及時調整防側傾桿位姿,可阻止甚至預防機器人側傾情況的發生。防側傾桿受力狀態如圖5(d)所示,對履帶A點和中心點O分別求力矩,可得:
(3)
首先,點C處摩擦力fC克服傾覆力矩,使得機器人不再沿點A傾覆。然后在摩擦力fA、fC和重力G的共同作用下,使得管道機器人逆時針旋轉,逐漸完成復位。通過以上分析可知,臨界側傾角即為∠KMA,因此通過降低機器人質心位置或增大機器人兩履帶間距均可增大臨界側傾角,一定程度上可降低管道機器人傾覆概率。但降低機器人質心通常會導致履帶行走部底盤過低,降低履帶機器人的越障能力;增大履帶間距會導致履帶行走部拐彎半徑增大,增加其拐彎難度。因此,在管道機器人結構尺寸不變的情況下,增加防側傾裝置,可實現管道機器人的平衡作業。
2 防側傾裝置智能控制
智能控制是一種擁有智能信息處理、智能信息反饋和智能控制決策的控制方式,是控制理論發展的高級階段,主要用來解決那些使用傳統人工處理難以解決的復雜系統控制問題,以提高機械自動化的水平。其中智能控制中信息的獲取主要是通過傳感器技術將物理信號轉變為電信號傳輸到處理器中進行處理。
2.1 傳感器
在機器人行業內傳感器的應用已更加廣泛,為了實現防側傾裝置的智能控制,管道機器人的控制系統中需要添加不同的傳感器,來監測管道內部環境和機器人自身的運動姿態,其中最重要的是水平儀和應變傳感器。
1)水平儀
傳統的氣泡水平儀并不能輸出電信號,所以在此機器人中采用圖6所示電感式水平儀,當機器人出現傾斜時,水平儀跟著機器人一起傾斜,水平儀內部擺錘磁芯與感應線圈繞組發生相對位置變化,進而導致感應線圈電壓變化,從而輸出相應的電信號,經過信號傳輸處理,轉化成傾斜角度信號[7-8]。
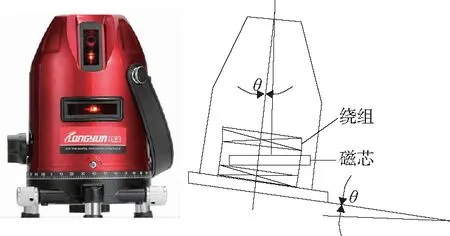
圖6 電感式水平儀
2)電阻應變式傳感器
由于履帶的不斷滾動,難以測量機器人兩側的壓力差,所以采用兩側支撐架的應變差代替壓力差。所使用的電阻應變式傳感器如圖7所示,金屬電阻應變絲隨著受力物體產生應變,導致其電阻阻值變化,從而輸出電流電信號。

圖7 電阻應變式傳感器
2.2控制系統
以往管內機器人常采用手動控制或固定模式控制,這種控制方法對于簡單已知的管道環境內機器人的控制尚且有效,但當面對未知的管道環境時,由于管道內部情況復雜多樣,且管道內部的空間有限,導致機器人無法對管道內部的環境和自身的運動姿態進行全面的實時檢測,并且機器人在管道內的運動具有不確定性,難以用固定模式進行精確的控制,而手動控制也非常考驗操作人員的反應速度與經驗,從而難以完成設定的工作。因此管道機器人的智能控制不僅可以提高其工作效率,同時也大大提高了其工作的穩定性和準確性。
管道機器人的姿態與其自身尺寸、工作彎管半徑和
管內工作情況等方面有關;管道機器人的姿態調整與機器人的本體質量、質心位置以及機器人與管壁的摩擦系數等方面有關。為了使機器人在環境復雜的管道內平穩行進,管道機器人自動調整姿態的能力顯得尤其重要。
為使機器人在不同的傾斜角度下具有一定的回正能力,需要不斷地檢測機器人的運動姿態,并根據不同的運動環境模式,由控制計算機發出圖3所示水平導軌平動的指令,進而伸出防側傾桿抵住管壁,自動進行機器人的姿態調整。
管道機器人仿側傾系統控制流程如圖8所示。將水平儀安裝于機器人防側傾裝置水平面上,用于測量機器人側傾角;同時將電阻應變式傳感器安裝在機器人支撐架的兩側,通過支撐架兩側的變形量判斷履帶輪的受力大小。傳感器獲取的機器人定位、位姿及受力信息,通過Zigbee無線收發模塊[9]傳輸至管道機器人控制臺。通過與設定值比較判斷,如果機器人的側傾角過大或是兩側履帶應變差值過大,控制臺判斷機器人已偏離管道中心,控制臺將給防側傾裝置中伺服電機發送啟動信號,輸出合適轉速與轉矩,推動水平導軌平動,進而將防側傾桿伸出,逐漸將傾斜的履帶機器人回正。當機器人回正,控制臺通過伺服電機反轉,驅動防側傾桿收回復位,然后關閉伺服電機,機器人正常繼續前進,直到步進到設定移動距離,機器人停止前進[10]。
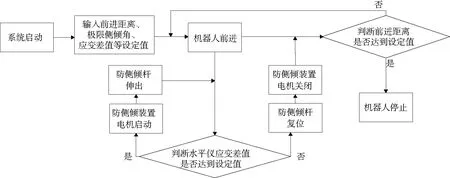
圖8 管道機器人防側傾系統控制流程圖
3 結語
本文結合國內外管道機器人的發展現狀和趨勢,針對傳統履帶式管道機器人存在的傾覆問題,設計了一款能夠主動防傾的雙輪履帶式管道機器人,尤其是對其防側傾裝置做了一定的優化改善。通過調節零部件可調支座的安裝角度,即可實現一定范圍內不同直徑管道的靈活適應,結構簡單,操作便捷,適應性強。該機器人利用水平儀和電阻應變式傳感器,實現了對其位姿及受力信息的實時監測,并通過Zigbee無線收發模塊和伺服電機控制,實現了機器人的自動糾偏和側傾預防,進而保證雙輪履帶式管道機器人的平穩作業,具有良好的工程應用價值。
