基于駕駛人視覺特性和停車視距的公路平面交叉角度研究
2020-10-23 12:42:36潘兵宏趙悅彤溫長鵬楊嬋君
公路交通科技 2020年10期
關鍵詞:設計
潘兵宏,趙悅彤,溫長鵬,楊嬋君,梅 杰
(長安大學 公路學院,陜西 西安 710064)
0 引言
平面交叉(以下簡稱平交)作為道路相交節點,交通信息復雜,車輛運行存在較多沖突點,事故頻發,尤其是無信號控制平交,由于缺乏信號燈管控,導致路權分配不明,使得無信號平交成為道路安全的短板,統計表明,在平交發生的事故中,有70%發生在無信號平交[1]。無信號平交根據交叉角度可劃分為正交和斜交兩種形式,交叉角度直接影響平交的安全性和經濟性。一方面,交叉角度影響交叉面積,隨角度減小,部分轉彎象限交叉面積逐漸增大,車輛穿越沖突區域時間增加,不利于平交的經濟與安全;另一方面,角度過小,會影響處于銳角象限駕駛人的通視效果[2]。我國《公路路線設計規范》(JTG D20—2017)(以下簡稱《路線規范》)[3]指出:平交應盡量正交,一般情況,銳角交叉角度(簡稱交角)應不小于70°,條件困難時,應不小于45°;而《公路路線設計規范》(JTG D20—2006)[4]規定:在條件困難時,應不小于60°;對于條件困難時的最小交叉角度值的變更,在條文中沒有給出解釋,且對不同設計速度道路的平交交角沒有細分。美國《A Policy on Geometric Design of Highways and Streets》 (簡稱AASHTO)[5]指出:平交的沖突取決于駕駛人的判斷、反應、駕駛能力;對于無信號平交,速度是影響駕駛人決策的關鍵因素[6]。駕駛人行為受駕駛人信息獲取能力制約,80%以上的道路信息獲取渠道為視覺[7],因此,本研究結合駕駛人視覺特性,根據平交視距的要求,探究不同設計速度下相交道路平交交角最小值。
關于平交斜交交角,基于事故頻率與平交幾何特性、交通量、交通組織方式關系的廣義線性模型研究指出,斜交平交受視距和穿越距離影響使得事故頻發[8],斜交交角越小,平交形狀越狹長,直行車輛通過時間越長,對轉彎車輛行駛影響越大,而采取增大銳角象限轉彎半徑,會使形狀更為狹長[9],斜交可能導致車身阻礙銳角象限駕駛人視線,對于停車讓行交叉口70°~75°的交角有助于改善視線[10];針對畸形平交存在的問題,常采用交通組織優化方法,并通過仿真驗證優化措施的有效性[11],當畸形平交視距受限時,可通過限速來增加駕駛人視角[12],或利用磁感線圈與單片機建立一種輔助方法進行處理[13]。文獻[14-15]研究了平交視距長度優化取值,建立驗算平交視距的三維模型[16],基于駕駛人視認性,通過仿真試驗可獲得駕駛人感知反應時間,進而計算斜交平交視距[17]。國內研究均基于規范給出的斜交交角最小值,探究斜交帶來的不利影響,并修正斜交情況下,視距三角形中采用的停車視距;但忽視了《路線規范》對交角最小值界定模糊,沒有探究平交交角最小取值的合理性。本研究通過分析駕駛人視覺特性,研究被交路駕駛人行車動態視野處于極大值情況下,針對一般視距三角形,分析求解平交交角計算方法,并結合規范,分析模型中關鍵參數的取值,進而確定不同設計速度道路相交時交角最小值。
1 平交相交角度的影響因素
1.1 平交視距三角形
無信號控制平交需保證在視距三角形內主路、被交路上的通視性,視距三角形由停車視距夾平交交角組成。根據平交選址是否受到地形、特殊構造物等條件限制,可以劃分為一般視距三角形與條件受限的視距三角形,分別如圖1(a)、圖1(b)所示。
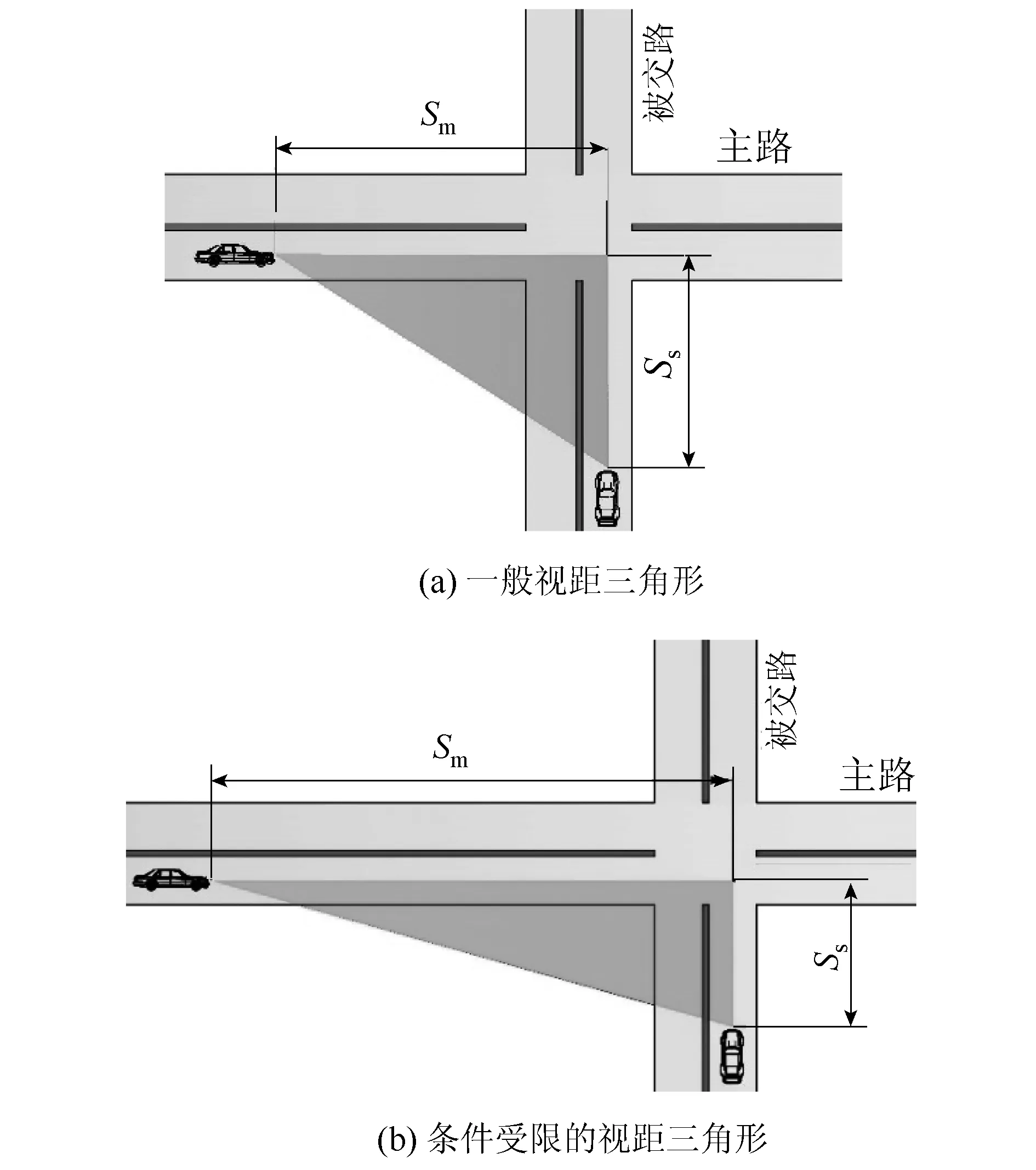
圖1 視距三角形Fig.1 Sight triangles
對于滿足條件的一般視距三角形,正交平交駕駛人在行駛至決策點(即停車視距起點)時,會判斷視野范圍內有無車輛,然后采取減速讓行或直接通過等措施,保證行駛安全。平交斜交時,處于銳角象限駕駛人視野會受限,由于主路設計速度大于等于被交路設計速度,故主路停車視距Sm大于等于被交路停車視距Ss,根據三角形幾何原理,邊長較長的邊對應較大內角,在駕駛人行駛至決策點,被交路駕駛人動視野范圍先達到極大值,故在駕駛人視野范圍處于極大值時,平交角度極小值由被交路駕駛人視野決定。
對于條件受限的視距三角形如圖1(b)所示,對應被交路停車讓行的平交[3],被交路駕駛人決策點至沖突點距離Ss為5~7 m,主路駕駛人決策點至沖突點距離應滿足安全交叉停車視距Sm。《公路項目安全性評價規范》(JTG805—2015)指出:停車讓行平交,位于被交路駕駛人行駛過程為先在決策點附近停車,當主路出現可接受間隙時,次路車輛伺機通過。被交路駕駛人伺機時,處于靜止狀態,其眼部動視野范圍可到達靜止狀態下極大值62°[18],再配合頭部及身體扭轉,因而駕駛人視野可覆蓋視距三角形范圍,故研究對象為一般視距三角形。
1.2 駕駛人動態視野
駕駛人動態視野,指在行駛時,駕駛人頭部固定的前提下,通過眼球自由轉動,駕駛人能夠看到的視野范圍。試驗結果表明動視野取值與車輛行駛速度密切相關[19-21],隨著車輛行駛速度提高,動視野可見區域縮小,見表1。

表1 動視野極值與行駛速度關系Tab.1 Relationship between dynamic visual field and travel speed
經回歸分析,視野極值與行駛速度呈顯著線性關系,如式(1)所示。此時R2=0.985,t檢驗結果表明回歸系數和常數的p值均小于0.05。公路設計速度取值范圍為20~100 km/h,采用公式(1)計算得到不同設計速度下駕駛人動視野,見表2,可知在20 km/h時駕駛人視野在水平范圍達到最大值左右各61°,小于人機工程學人眼視野范圍極值62°[23]。
w=-1.028V+142.643,
(1)
式中,w為人眼雙側動視野范圍;V為行駛速度。

表2 不同公路設計速度下的動視野范圍Tab.2 Dynamic visual field ranges at different highway design speeds
1.3 駕駛人頭部扭轉特性
車輛行駛過程中,駕駛人通過視覺獲取信息的過程,是眼球與頭部轉動共同作用的結果。動視野獲取信息范圍受限時,駕駛人會自然轉動頭部,以獲取所需信息。文獻[18,22-23]指出,頭部自然轉動角度界限取左右各45°為宜。在考慮駕駛人頭部轉動的情況下,可得到不同速度下駕駛人單側視野極值,見表3。因此可把單側視野極值作為駕駛人在平交處的單側視野范圍,超過此范圍,將影響駕駛人對平交范圍內交通狀況信息的獲取,不利于駕駛員做出正確的判斷。

表3 單側視野極值與道路設計速度關系Tab.3 Relationship between extreme unilateral visual field and highway design speed
2 平交最小交角計算模型
2.1 被交路車輛直行時最小交角計算模型
主、被交路駕駛人均處于斜交銳角象限,當被交路車輛直行,主路與被交路直行車輛存在沖突點O。為確保行車安全,應確保駕駛人在看到沖突車輛后,均能在O點前安全停車。考慮臨界情況如圖2所示,假定被交路駕駛人在決策點B處單側視野達到極大值為β,OB為被交路的停車視距Ss(按表4取值),當主路上距離OA恰好等于停車視距值Sm(按表4取值)時,對應平交交叉角度θ取極小值。在三角形AOB中,根據正弦定理求出OA關于θ的表達式,如公式2所示。由于不利于駕駛人觀察的情況是銳角象限,故θ的取值范圍為(0,90°)。
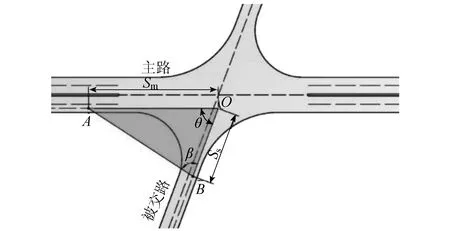
圖2 被交路車輛直行平交角度Fig.2 Intersection angle of vehicle going straight on crossed road

(2)
圖2中相交道路停車視距計算公式根據AASHTO[5]如公式(3)所示。我國交叉口視距三角形兩相交道路的停車視距(又稱引道視距)與一般路段相同,沒有考慮車輛駛近交叉口減速行為;而美國交叉口附近的停車視距區別于一般路段,考慮了駕駛人在駛近交叉口的減速行為。為貼合實際行駛情況、保障安全,同時適用于我國現有交叉口設計情況,在計算交叉口停車視距時,不對道路設計速度折減,但減速度取值考慮在交叉口減速時的最大值4.51 m/s2[24],如公式(4)所示,縱向摩阻系數根據《澳大利亞道路設計指南》取0.46[25],計算取整后停車視距結果見表4。
(3)
式中,a為減速度,4.51 m/s2;t為反應時間,取2.5 s[3](判斷時間1.5 s、運行時間1.0 s);
a=gf,
(4)
式中,g為重力加速度,9.8 m/s2;f為縱向摩擦系數,0.46。

表4 停車視距Tab.4 Stopping sight distance
利用二分法求出使得公式(2)成立的θ值,被交路車輛直行斜交角度計算結果見表5。
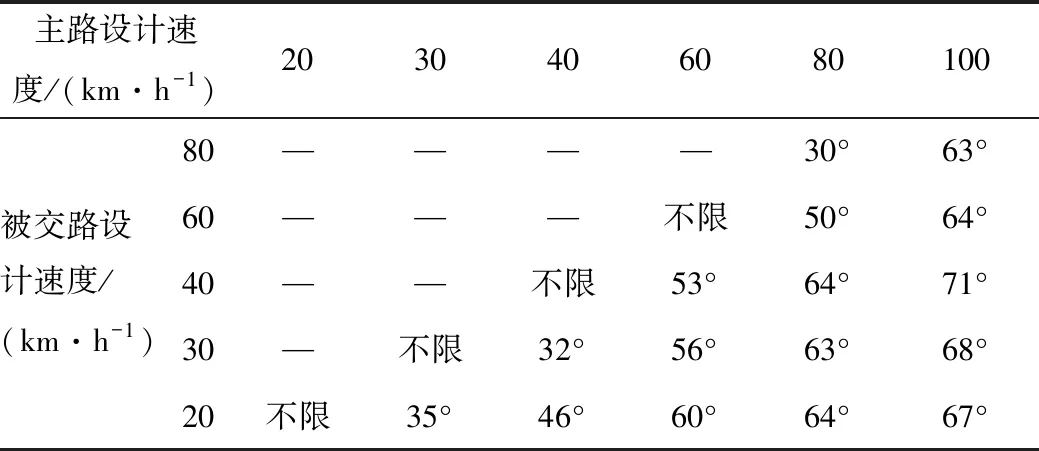
表5 根據被交路直行視距計算的平交最小交角Tab.5 Minimum intersection angle calculated according to sight distance of crossed road
主、被交路設計速度不同,斜交交角計算值不同,為進一步探究交角與設計速度之間變化關系,將停車視距計算公式(3)代入式(2),得到相交道路設計速度與斜交交角之間的具體關系,見公式5,繪制交角θ與主、被交路設計速度之間的三維圖像,如圖3所示。
θ=63.678 5+0.514Vs-
(5)
式中,Vs為被交路設計速度;Vm為主路設計速度;θ為平交交角。
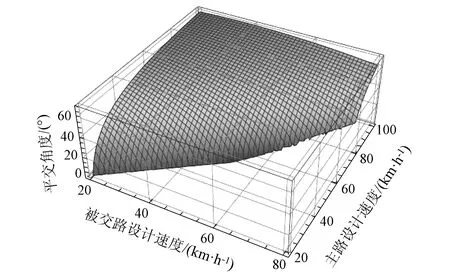
圖3 被交路車輛直行平交角度與設計速度關系Fig.3 Relationship between intersection angle of vehicle going straight on crossed road and design speed
從圖3可知:當被交路速度一定時,交叉角度最小值隨主路設計速度增大而逐漸增大,且增大幅度隨主路設計速度增大而減小。當主路設計速度在80~100 km/h,交叉角度隨被交路運行速度增大,先增大后減小,在被交路設計速度為40 km/h時,取極大值,且被交路設計速度與40 km/h差值越大,下降幅度越顯著;當主路設計速度低于80 km/h時,交叉角度最小值隨被交路設計速度增大而逐漸增大,且增大幅度隨被交路設計速度增大而增大。
2.2 被交路車輛左轉時最小交角計算模型

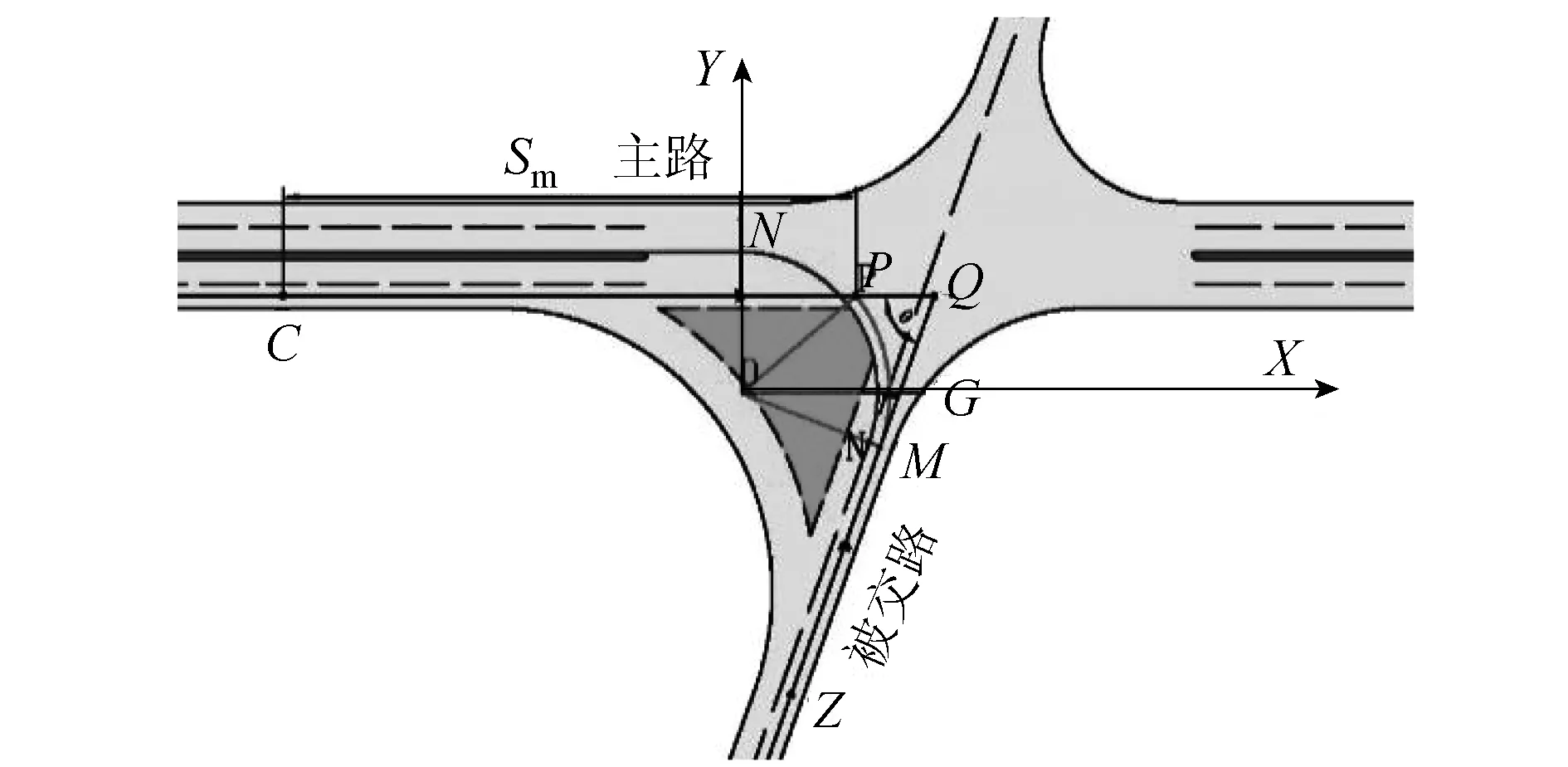
圖4 被交路車輛左轉平交角度Fig.4 Intersection angle of vehicle turning left on crossed road
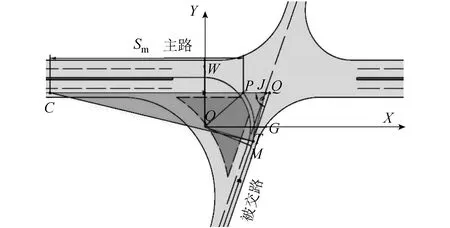
圖5 被交路行車視距小于左轉曲線平交角度Fig.5 Intersection angle of vehicle turning left on crossed
車輛在轉彎段行駛的速度取值根據《路線設計規范》[3],見表6。當左轉彎車速取最大時,對應單側視野極值最小,由表3可知為101°,由于101°>90°,故被交路駕駛人觀測主路沖突車輛位置位于第一象限時,單側視野極值β一定能夠覆蓋∠CTJ。當駕駛人位于第二象限時,計算模型如下,P點坐標:

x2+y2=R2。
(6)

(7)
直線PQ所在直線表達式為:
y=R-(n1-0.5)l1-μ1。
(8)
由式(7)、式(8)聯立得P點的坐標:
(9)
C點坐標表示為:
(10)

(11)
在△OTC中,根據余弦定理得:
(12)
因為被交路駕駛人觀測角∠CTJ=90°+∠OTC,而∠OTC與平交交角θ無關,故單側視野極值β能否覆蓋視距三角形,與平交交角θ無關,即此時駕駛人視野不會限制平交交角。

表6 左轉彎半徑及對應速度
當被交路駕駛人在直行段ZM觀測主路沖突車輛,如圖6所示,假設觀測點為D,D為ZM上任意一點,Z點為被交路車輛開始減速對應位置。被交路駕駛人在駛近交叉口左轉前,即使主路不存在潛在沖突車輛,為保障行車安全,駕駛人會減速至左轉彎半徑對應左轉速度(表6),由于駕駛人觀測點位置存在個體差異,故在計算平交角度時,駕駛人觀測點D是任意的,被交路駕駛人在D點速度取值范圍為[R,Vs],Vs為被交路設計速度,計算D點速度從最小值到最大值對應的平交交角θ。情況2中P點坐標與情況1相同。
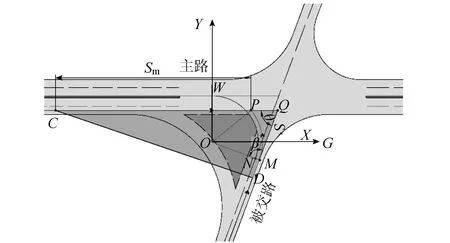
圖6 被交路行車視距大于等于左轉曲線平交角度Fig.6 Intersection angle of vehicle turning left on crossed
由四邊形內角和定理得∠WON=180°-θ,因為x軸y軸相互垂直,求得M點坐標與x軸夾角∠GON=90°-θ,根據三角函數求得M點坐標:
(13)
根據QM斜率k=tanθ,求得Q點坐標:
(14)
由兩點坐標距離公式求得QM,CQ:
(15)


(16)
根據《路線規范》[3],各級公路中間帶寬度,車道數及寬度取值依據見表7,各參數取值代入被交路車輛左轉平交角度計算模型,分別計算R取15,20,25,30 m時,被交路駕駛人在觀測點D速度從最小值,以步長1變化到最大值時對應平交交角最小值,根據計算結果取平交交角最小值中的最大值作為主、被交路設計速度既定情況下,保障平交視距三角形通視的最小角度(表8)。并繪制主、被交路設計速度一定,被交路駕駛人觀測主路沖突車輛D點速度及位置變化對于平交交角的影響趨勢圖,如圖7所示。
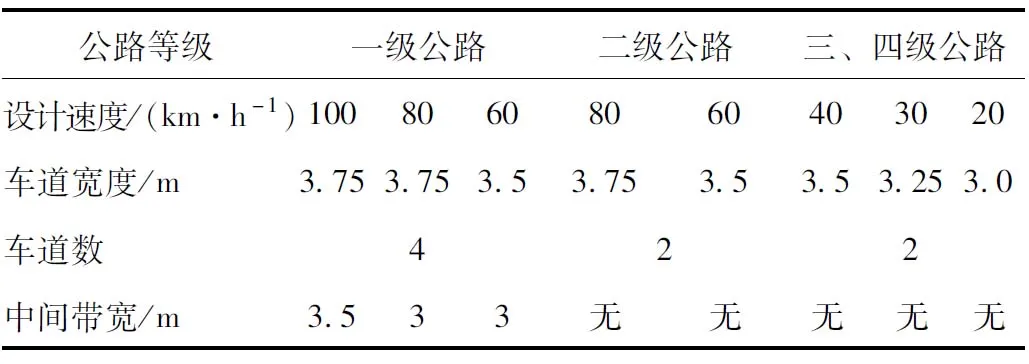
表7 各級公路基本參數取值Tab.7 Basic parameters of highways at different levels
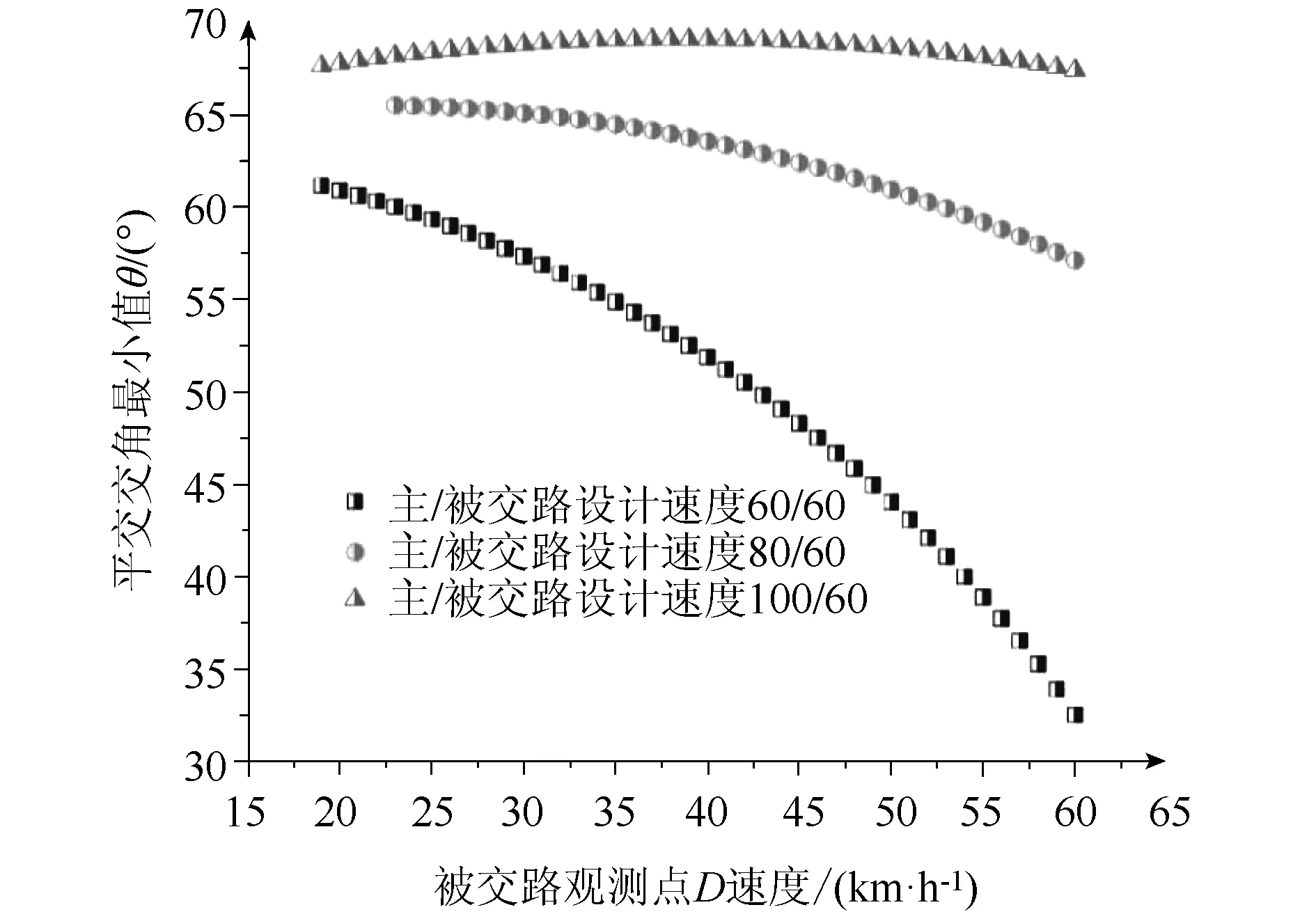
圖7 被交路車輛觀測點速度不同時對應左轉平交角度Fig.7 Intersection angle of vehicle turning left on crossed road at different speeds at observing point
圖7表征主、被交路設計速度一定,被交路駕駛人在觀測點D行駛速度不同時,對應平交交角最小值變化趨勢。當被交路設計速度一定,主路設計速度小于100 km/h,平交交角最小值隨觀測點速度變大而逐漸降低;而主路設計速度為100 km/h時,平交交角最小值隨觀測點速度變大先增加后降低。當被交路設計速度改變,主路設計速度仍取上述3種情況,變化趨勢與被交路設計速度為60 km/h相同。
由表8可知,主被交路設計速度一定,主路設有中間帶道路比不設中間帶道路的平交交角最小值小,說明設置中間帶在一定程度上可提高平交范圍的通視性,但影響幅度較小。在主、被交路設計速度及道路等級一定情況下,增大左轉彎半徑,被交路駕駛人在D點觀測到主路沖突車輛時速度VD增大,但增大左轉半徑對于改善平交口視距條件沒有必然聯系。當且僅當被交路設計速度降低,其他條件不變時,平交交角最小值降低,但下降幅度較小,故將表7進行簡化如表9所示。
2.3 平交銳角最小值
根據表9計算后化簡結果,結合表5被交路直行視距計算的平交交角,兩者取大值得到公路平交交角最小值θ。出于方便施工考慮,將交角最小值取整為整5或整10 m,最終得到滿足駕駛人視野范圍的不同設計速度下平交角度銳角最小值,見表10。從表10可知:平交交叉角度最小值取值范圍為35°~75°;平交交角與主路設計速度相關。 根據《路線設計規范》[3]規定:平交交角在條件困難時,應不小于45°,在一般情況下,應不小于70°。與表10對比,可知平交交角若想在任何情況下均能保障視距三角形通視性,應將70°變為75°。
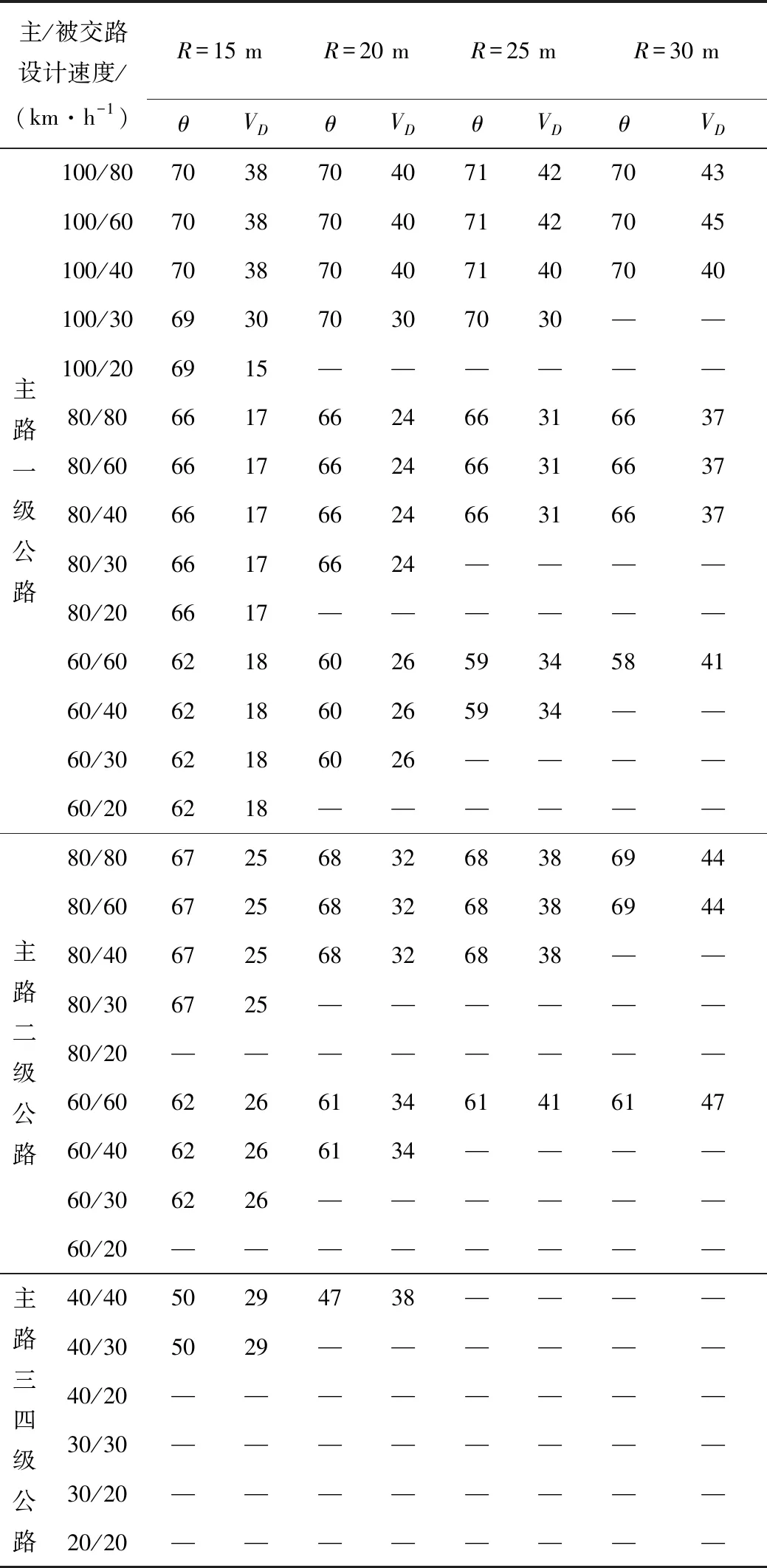
表8 根據被交路左轉視距計算的平交最小交角Tab.8 Minimum intersection angle calculated according to left-turn sight distance on crossed road
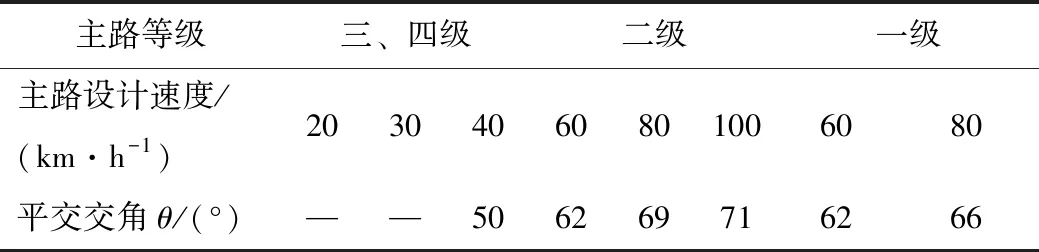
表9 被交路左轉視距計算的平交最小交角(簡化)Tab.9 Minimum intersection angle calculated according to left-turn sight distance on crossed road (simplified)

表10 不同設計速度下公路平交最小交角Tab.10 Minimum intersection angle of highway at different design speeds
3 結論
駕駛人在通過平交沖突區域時,其感知、判斷和反應能力是避免車輛沖突的關鍵,應確保駕駛人在平交范圍內視線良好。本研究基于平交視距三角形,根據駕駛人動態視覺特性,以駕駛人位于平交決策點處視野區域覆蓋視距三角形為條件,分別建立被交路車輛直行和左轉時平交角度計算模型,并采用規范中道路橫斷面設計指標的建議值,利用二分法求解出滿足駕駛人視野范圍的不同設計速度下平交角度銳角最小臨界值。研究表明當主路設計速度大于等于40 km/h,被交路左轉為限制平交交角最小值主要情況,其余情況受主路車輛直行限制,平交交角與主路設計速度、駕駛人在觀測點D時的速度密切相關。創新點如下:
(1)基于駕駛人位于平交決策點處的視野范圍和一般視距三角形,建立了被交路車輛直行和左轉交叉角度最小值計算模型。
(2)被交路車輛直行情況下,平交交角與主、被交路設計速度關系如下:被交路速度一定,交叉角度最小值隨主路設計速度增大而增大。當主路設計速度在80~100 km/h,交叉角度隨被交路運行速度增大,先增后減,被交路設計速度為40 km/h時,取極大值;當主路設計速度低于80 km/h時,交叉角度最小值隨被交路設計速度增大而增大。
(3) 被交路車輛左轉情況下,主被交路設計速度一定,主路設有中間帶道路比不設中間帶道路的平交交角最小值小,說明設置中間帶在一定程度上可提高平交范圍的通視性。在主、被交路設計速度及道路等級一定情況下,增大左轉彎半徑,被交路駕駛人觀測到主路沖突車輛時速度增大,但增大左轉半徑對于改善平交口視距條件沒有必然聯系。
(4)提出了平交斜交時,保證銳角象限駕駛人視線良好的不同設計速度下公路斜交最小交角建議值。
研究成果細化了我國平交最小交角的規定,但研究只考慮了主、被交路線形都是直線的情況,考慮平交縱坡較緩,忽略了縱坡對視距的影響,今后將進一步研究主要道路平面線形為圓曲線情況,并計算縱坡為3%時停車視距修正對平交交角的影響。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04