基于噪聲卷積調(diào)制的SAR虛假信號(hào)生成新方法
2020-10-24 11:02:28黃大通邢世其劉業(yè)民李永禎肖順平
雷達(dá)學(xué)報(bào) 2020年5期
黃大通 邢世其* 劉業(yè)民 李永禎 肖順平
①(國(guó)防科技大學(xué) 電子信息系統(tǒng)復(fù)雜電磁環(huán)境效應(yīng)國(guó)家重點(diǎn)實(shí)驗(yàn)室 長(zhǎng)沙 410073)
②(中國(guó)人民解放軍第32579部隊(duì) 桂林 541001)
1 引言
合成孔徑雷達(dá)[1](Synthetic Aperture Radar,SAR)作為一種高分辨率成像雷達(dá),具有全天時(shí)、全天候和透視性等優(yōu)良特性,被廣泛應(yīng)用于情報(bào)搜集、戰(zhàn)場(chǎng)監(jiān)控以及導(dǎo)彈末端圖像匹配制導(dǎo)等眾多軍事領(lǐng)域,已成為現(xiàn)代戰(zhàn)場(chǎng)“察打一體化”武器系統(tǒng)的核心傳感器[2,3],對(duì)我軍重要的軍事設(shè)施和部署構(gòu)成了極大威脅。鑒于此,展開(kāi)針對(duì)SAR干擾技術(shù)的研究,對(duì)提升我國(guó)的國(guó)土防御能力和戰(zhàn)時(shí)生存能力都具有重要軍事價(jià)值。
SAR干擾技術(shù)可分為壓制干擾[4]和欺騙干擾[5],其中普通噪聲干擾與SAR信號(hào)間不具備相干性,因此對(duì)干擾機(jī)發(fā)射功率需求較大,易受到敵方的反輻射打擊;而欺騙干擾則需較多的高精度偵察參數(shù),算法復(fù)雜度較高,干擾實(shí)時(shí)性較差,不利于工程實(shí)現(xiàn)。1999年,國(guó)際著名電子戰(zhàn)專家Schleher[6]在《Electronic Warfare in the Information Age》一書(shū)中提出了“靈巧噪聲干擾”的概念,由于該類干擾具備自動(dòng)瞄準(zhǔn)信號(hào)頻率,可獲得雷達(dá)信號(hào)處理增益以及調(diào)制方式靈活、干擾效果多樣等優(yōu)點(diǎn),因此一經(jīng)提出便受到了科研工作者的廣泛關(guān)注[7–16]。文獻(xiàn)[11]通過(guò)對(duì)靈巧噪聲干擾輸出要求的逆向研究,推導(dǎo)出了其卷積調(diào)制的數(shù)學(xué)模型。文獻(xiàn)[12]分析了靈巧噪聲干擾對(duì)SAR系統(tǒng)所具有的特點(diǎn)和優(yōu)勢(shì),提出了利用數(shù)字射頻存儲(chǔ)器來(lái)實(shí)現(xiàn)干擾調(diào)制的方法。文獻(xiàn)[13]提出了隨機(jī)脈沖卷積的干擾方法,通過(guò)控制隨機(jī)脈沖的時(shí)延和范圍,以此控制干擾帶寬度。文獻(xiàn)[14]則通過(guò)選取不同的噪聲時(shí)長(zhǎng)以及噪聲篩選門(mén)限值來(lái)產(chǎn)生密集假目標(biāo)干擾,兼具了欺騙與壓制效果。文獻(xiàn)[15]研究了相干和非相干情況下的噪聲卷積的效果,指出可通過(guò)改變干擾調(diào)制函數(shù)產(chǎn)生欺騙和壓制的效果。文獻(xiàn)[16]研究了脈沖卷積調(diào)制干擾對(duì)超寬帶SAR的效果。然而,上述的傳統(tǒng)噪聲卷積調(diào)制干擾卻在距離向始終滯后于干擾機(jī),無(wú)法掩護(hù)其前方場(chǎng)景,且干擾分散于整個(gè)方位向,其能量利用率較低。
針對(duì)以上問(wèn)題,本文提出了一種對(duì)傳統(tǒng)噪聲卷積調(diào)制干擾的改進(jìn)方法,其創(chuàng)新之處在于:通過(guò)快時(shí)間移頻調(diào)制,實(shí)現(xiàn)了對(duì)干擾距離向位置的靈活控制,解決了傳統(tǒng)噪聲卷積干擾滯后的問(wèn)題;通過(guò)對(duì)噪聲調(diào)制模板的慢時(shí)間域?yàn)V波,實(shí)現(xiàn)了對(duì)干擾方位向壓制范圍的精準(zhǔn)控制,提高了能量利用率;由于本文所提的方法是在離線模式下對(duì)噪聲調(diào)制模板作預(yù)處理,因此不會(huì)影響干擾實(shí)時(shí)性,便于工程實(shí)現(xiàn)。
本文的主要內(nèi)容分為3個(gè)部分,第1部分首先建立了干擾的信號(hào)模型,進(jìn)而推導(dǎo)分析了其對(duì)SAR的干擾效果;第2部分對(duì)所提干擾方法的性能作了理論分析;第3部分通過(guò)仿真實(shí)驗(yàn)對(duì)所提方法的干擾效果作了驗(yàn)證。
2 基于噪聲卷積調(diào)制的SAR干擾改進(jìn)方法
2.1 對(duì)SAR的干擾信號(hào)模型
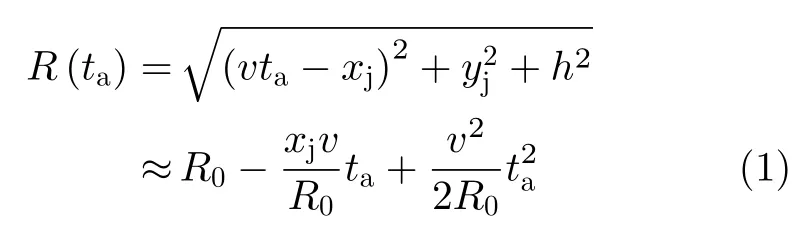
在圖1所示的干擾場(chǎng)景幾何模型中,SAR平臺(tái)在高度h的航跡線上以速度v沿x軸正向飛行,記慢時(shí)間ta0的地面投影為坐標(biāo)原點(diǎn)O,平臺(tái)位置為(vta,0,h)。場(chǎng)景中部署了一部干擾機(jī),其坐標(biāo)位置為(xj,yj,0),則經(jīng)泰勒公式[1]展開(kāi)后干擾機(jī)到SAR平臺(tái)的瞬時(shí)斜距為
雷達(dá)發(fā)射信號(hào)為線性調(diào)頻(Linear Frequency Modulation,LFM)信號(hào)

式中,tr表示快時(shí)間,Tp為信號(hào)時(shí){寬,kr表示調(diào)頻斜率,fc為信號(hào)載頻,
為破壞SAR系統(tǒng)對(duì)重要軍事設(shè)施和部署的偵察,干擾機(jī)在被雷達(dá)波束照射的合成孔徑時(shí)間內(nèi),對(duì)其信號(hào)進(jìn)行截獲,并作下變頻處理。

式中,si(tr,ta)表示干擾機(jī)的截獲信號(hào),?表示快時(shí)間上的卷積運(yùn)算,表示雷達(dá)到干擾機(jī)單程斜距的時(shí)延,c為光速。
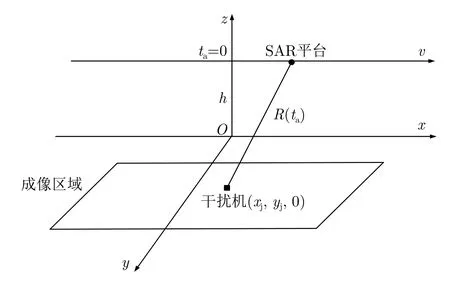
圖1 干擾場(chǎng)景的幾何模型Fig.1 The geometry model of jamming scenario
根據(jù)LFM信號(hào)的時(shí)頻耦合特性[17–20]:信號(hào)頻率的偏差將造成其時(shí)延的改變,故干擾機(jī)對(duì)截獲信號(hào)作式(4)所示的移頻調(diào)制,以此實(shí)現(xiàn)對(duì)干擾距離向位置的控制。

式中,?f為干擾機(jī)的移頻調(diào)制量。
接著,干擾機(jī)將調(diào)制信號(hào)m1(tr,ta)與預(yù)先載入的噪聲作卷積處理。

式中,n(tr,ta)是快時(shí)間寬度為T(mén)n,慢時(shí)間寬度為T(mén)s的二維高斯白噪聲調(diào)制模板,Ts為雷達(dá)的合成孔徑時(shí)間,噪聲模板在快、慢時(shí)間上均表現(xiàn)為非相關(guān)。
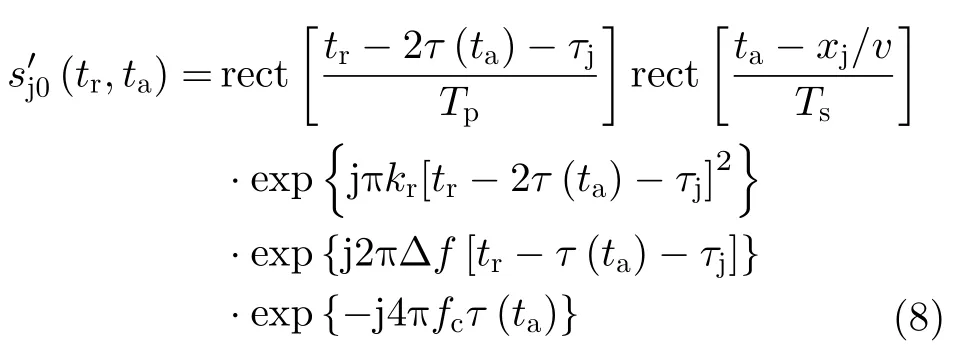
最后,干擾機(jī)將調(diào)制信號(hào)m2(tr,ta)經(jīng)上變頻處理后,形成干擾信號(hào)sj(tr,ta)。

其中,τj為干擾機(jī)的固定轉(zhuǎn)發(fā)時(shí)延。
由此,雷達(dá)接收到的基帶干擾信號(hào)為

2.2 對(duì)SAR的干擾結(jié)果分析
下面以經(jīng)典的R-D成像算法[1]為例,對(duì)SAR的干擾原理作推導(dǎo)分析。SAR系統(tǒng)對(duì)接收到的基帶干擾作距離向壓縮和距離遷徙矯正后,即有

鑒于SAR信號(hào)帶寬較大,sinc(·)函數(shù)可近似為δ(·)函數(shù)[22],故式(9)所示的干擾距離向壓縮結(jié)果可近似為

在方位向上,為便于作進(jìn)一步推導(dǎo)分析,只考慮式(10)中的慢時(shí)間項(xiàng)[23],并代入式(1)所示的瞬時(shí)斜距,則慢時(shí)間上的干擾信號(hào)可近似為
式中,na(ta)僅為慢時(shí)間上的噪聲,是方位向調(diào)頻斜率,λ為信號(hào)波長(zhǎng)。
顯然,式(11)即是對(duì)LFM信號(hào)的噪聲乘積調(diào)制干擾模型[24],噪聲na(ta)可看作是分布在頻譜上的無(wú)數(shù)個(gè)單頻信號(hào)的合成,如式(12)所示(忽略幅度的影響)。

其中,Bn為噪聲模板的慢時(shí)間單邊帶寬。
則式(11)可轉(zhuǎn)化為
由此可得干擾的方位向壓縮結(jié)果

綜上所述,在距離向上,由式(10)可知,干擾的成像結(jié)果等效于將噪聲模板作平移,噪聲的起始時(shí)刻為2τ0+τj??f/kr,壓制時(shí)長(zhǎng)為T(mén)n。故,干擾方可通過(guò)設(shè)置移頻調(diào)制量 ?f和噪聲模板的快時(shí)間長(zhǎng)度Tn來(lái)實(shí)現(xiàn)對(duì)干擾的距離向壓制位置和范圍的靈活控制,具體計(jì)算方法分別如式(15)和式(16)所示。然而,移頻調(diào)制卻是以干擾功率的失配損耗為代價(jià)[25–28],因此移頻量往往不易過(guò)大。反之,對(duì)于傳統(tǒng)噪聲卷積調(diào)制干擾,由于移頻量?f0,故噪聲將始終滯后于干擾機(jī),無(wú)法掩護(hù)其前方場(chǎng)景。

式中,?Rshift為干擾方設(shè)定的距離向偏移量,?Rshift>0,向后移動(dòng),?Rshift<0,向前移動(dòng);?Rj為干擾方設(shè)定的距離向壓制長(zhǎng)度。
在方位向上,由式(14)可知,干擾的壓制范圍取決于噪聲模板的慢時(shí)間單邊帶寬Bn,因此本文所提的干擾方法通過(guò)在離線狀態(tài)下預(yù)先對(duì)噪聲調(diào)制模板作慢時(shí)間域的低通濾波,限制其慢時(shí)間帶寬,以控制干擾的方位向壓制范圍,具體計(jì)算方法如式(17)所示。反之,對(duì)于傳統(tǒng)噪聲卷積調(diào)制干擾[15,22],由于噪聲模板未經(jīng)過(guò)濾波處理,因此其干擾能量將擴(kuò)散于整個(gè)方位向。

式中,?Xj為干擾方設(shè)定的方位向壓制長(zhǎng)度,fstop為低通濾波器的截止頻率。
3 對(duì)SAR干擾性能的理論分析
3.1 偵察誤差的影響分析
由于本文所提干擾為相參干擾,干擾的執(zhí)行必然離不開(kāi)對(duì)SAR平臺(tái)相關(guān)參數(shù)的偵察,因此有必要分析偵察誤差對(duì)干擾效果的影響情況。從上一小節(jié)可知,調(diào)制干擾所需的偵察參數(shù)包括信號(hào)的調(diào)頻斜率kr,SAR平臺(tái)飛行速度v,信號(hào)波長(zhǎng)λ以及干擾機(jī)與雷達(dá)間的初始斜距R0,設(shè)其對(duì)應(yīng)的絕對(duì)偵察誤差分別為?kr,?v,?λ以及?R0,則可將相應(yīng)的相對(duì)誤差分別記作?kr/kr,εv?v/v,ελ?λ/λ以及?R0/R0。根據(jù)式(15)和式(17),可得偵察誤差下的移頻調(diào)制量和濾波器截止頻率分別為
結(jié)合式(10)和式(14),可得偵察誤差下的干擾距離向起始位置和方位向壓制范圍分別為
可以看出,偵察誤差并不會(huì)影響干擾的輸出形式,只會(huì)造成實(shí)際干擾結(jié)果與預(yù)定效果的偏差:干擾的距離向起始位置與εkr成正比,而干擾的方位向壓制范圍則與εv成正比,與ελ和εR0成反比。因此,即使在偵察設(shè)備不能提供準(zhǔn)確雷達(dá)參數(shù)的情況下,我方依然可以利用先驗(yàn)信息(如典型SAR場(chǎng)景的參數(shù)范圍),采用直觀估值的方法估計(jì)出來(lái),完成對(duì)場(chǎng)景的掩護(hù),故本文所提的干擾方法對(duì)偵察設(shè)備的要求較低,戰(zhàn)場(chǎng)生存能力強(qiáng)。
3.2 功率增益分析
對(duì)常規(guī)噪聲干擾,由于其與雷達(dá)信號(hào)間不具備相參性,無(wú)法獲得信號(hào)處理增益,故對(duì)干擾功率的需求較大[29];對(duì)傳統(tǒng)噪聲卷積調(diào)制干擾,其僅能獲得距離向信號(hào)處理增益,無(wú)法控制干擾的方位向能量分布。然而,本文所提的干擾方法卻可獲得雷達(dá)的二維信號(hào)處理增益,降低對(duì)干擾功率的需求。
在距離向上,與傳統(tǒng)噪聲卷積調(diào)制干擾的分析方法相同,這里不考慮移頻調(diào)制的影響。從式(5)可知,壓縮前的干擾信號(hào)時(shí)寬為T(mén)n+Tp;從式(9)可知,壓縮后的雷達(dá)信號(hào)時(shí)寬為1/Br,噪聲調(diào)制模板不變,故壓縮后的干擾信號(hào)時(shí)寬為T(mén)n+1/Br。由于壓縮網(wǎng)絡(luò)是無(wú)源,故壓縮前后的干擾能量保持不變,即有

式中,Ji和Jo分別為距離向壓縮前后的干擾功率。
從而推得干擾的距離向增益Gr為

可以看出,在SAR信號(hào)的時(shí)寬帶寬一定時(shí),干擾的距離向增益直接取決于噪聲調(diào)制模板的快時(shí)間寬度:當(dāng)Tn?1/Br時(shí),干擾增益近似為1,即未獲得任何信號(hào)處理增益,干擾效果與常規(guī)噪聲干擾相同,而由式(16)可知,此時(shí)干擾的距離向壓制范圍卻較大;當(dāng)Tn?1/Br時(shí),干擾增益近似為Gr≈TpBr,即干擾所獲增益與目標(biāo)回波所獲增益基本相等,干擾所需功率將極大降低,但此時(shí)的距離向壓制范圍卻很小。
在方位向上,與文獻(xiàn)[24]對(duì)噪聲乘積調(diào)制干擾的分析方法相同,由式(11)和(14)所示的干擾模型和壓縮結(jié)果可知,壓縮前后的干擾信號(hào)時(shí)寬分別為T(mén)s和同樣,根據(jù)能量守恒定律可得干擾的方位向增益Ga為

可以看出,干擾的方位向增益與噪聲調(diào)制模板的慢時(shí)間帶寬成反比:Bn越小,干擾增益越大,而由式(17)可知,其方位向壓制范圍卻將越小;反之亦然。
故,本文所提干擾獲得的二維總增益G為

3.3 算法復(fù)雜度分析
通過(guò)第2.1節(jié)的推導(dǎo)分析可知,本文所提干擾方法主要包括了離線狀態(tài)下的干擾調(diào)制和實(shí)時(shí)調(diào)制兩個(gè)階段。在離線狀態(tài)下,干擾機(jī)首先產(chǎn)生滿足距離向壓制范圍要求的噪聲模板,并將其變換到慢時(shí)間頻域;接著,結(jié)合前期的電子偵察所獲參數(shù),按照方位向的壓制范圍要求,對(duì)模板作慢時(shí)間頻域的低通濾波處理,并將其反變換到慢時(shí)間域。在該階段中,噪聲模板的慢時(shí)間FFT變換對(duì)應(yīng)的計(jì)算復(fù)雜度[30]為o(Nslog2Ns),其中o(·)表示“在···量級(jí)”或“與···呈正比”,Ns為慢時(shí)間FFT長(zhǎng)度;噪聲模板的慢時(shí)間頻域低通濾波為向量間的點(diǎn)對(duì)點(diǎn)乘積,其相應(yīng)的計(jì)算復(fù)雜度為o(Ns);通過(guò)逆FFT將調(diào)制好的噪聲模板變換到慢時(shí)間域的計(jì)算復(fù)雜度為o(Nslog2Ns)。由于以上過(guò)程均在離線狀態(tài)下進(jìn)行,因此干擾機(jī)具有較為充裕的運(yùn)算時(shí)間。
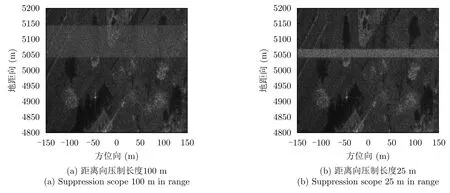
圖2 傳統(tǒng)噪聲卷積調(diào)制的干擾結(jié)果Fig.2 The imaging results of the traditional noise convolution modulation jamming
在實(shí)時(shí)調(diào)制階段,干擾機(jī)首先對(duì)截獲信號(hào)作快時(shí)間移頻調(diào)制,再將其變換到快時(shí)間頻域,與噪聲模板作頻域乘積,最后將調(diào)制信號(hào)反變換到快時(shí)間域。在該階段中,算法的主要計(jì)算量來(lái)自于快時(shí)間移頻調(diào)制、快時(shí)間FFT變換、向量的點(diǎn)對(duì)點(diǎn)乘積以及快時(shí)間逆FFT變換,相應(yīng)的計(jì)算復(fù)雜度分別為o(Nt),o(Nflog2Nf),o(Nf)和o(Nflog2Nf),其中Nt為干擾機(jī)對(duì)截獲信號(hào)的采樣點(diǎn)數(shù),Nf為快時(shí)間FFT長(zhǎng)度。在被雷達(dá)波束照射的合成孔徑時(shí)間內(nèi),干擾機(jī)會(huì)不斷截獲到每個(gè)脈沖重復(fù)周期的SAR信號(hào),干擾調(diào)制過(guò)程會(huì)重復(fù)進(jìn)行,因此對(duì)實(shí)時(shí)性要求較高。鑒于在離線狀態(tài)下已完成了對(duì)噪聲模板的調(diào)制,因此剩余計(jì)算量控制在可接受的范圍。
4 仿真實(shí)驗(yàn)與結(jié)果分析
4.1 干擾的有效性驗(yàn)證
在仿真實(shí)驗(yàn)中,SAR平臺(tái)的飛行高度為5 km,飛行速度為 200 m·s?1,工作于正側(cè)視模式;信號(hào)載頻為10 GHz,脈沖時(shí)寬和帶寬分別為5 μs和100 MHz,方位向波束寬度為0.03 rad,雷達(dá)下視角為45°,脈沖重復(fù)頻率為800 Hz,成像區(qū)域的方位向和地距向范圍分別為300 m和400 m。干擾機(jī)部署于場(chǎng)景中心,其固定轉(zhuǎn)發(fā)時(shí)延為0.2 μs。
圖2所示為傳統(tǒng)噪聲卷積調(diào)制的干擾結(jié)果,其中雷達(dá)接收端的干信比為 2.3 dB,噪聲模板的快時(shí)間寬度采用式(16)所示的設(shè)置方法,壓制長(zhǎng)度分別設(shè)置為100 m和25 m。可以看出,干擾能量分布于整個(gè)方位向,形成了壓制條帶,但卻在距離向始終滯后于干擾機(jī)(固定轉(zhuǎn)發(fā)時(shí)延的滯后距離約42 m),無(wú)法對(duì)其前方場(chǎng)景進(jìn)行掩護(hù)。另一方面,圖2(a)中的干擾壓制范圍較大,能量分布較為稀疏,對(duì)場(chǎng)景的掩護(hù)效果較差;但在圖2(b)中,壓制范圍的縮小使干擾能量更加集中,對(duì)局部場(chǎng)景的掩護(hù)效果更好。
圖3—圖5所示為本文所提干擾方法的成像結(jié)果,雷達(dá)接收端的干信比依然設(shè)置為 2.3 dB。當(dāng)干擾的距離向偏移量設(shè)置為–242 m,壓制面積設(shè)置為300 m×400 m時(shí),干擾實(shí)現(xiàn)了對(duì)全成像面的壓制,如圖3所示。然而,鑒于覆蓋區(qū)域太大,能量分布稀疏,故干擾對(duì)場(chǎng)景的掩護(hù)效果較差。當(dāng)同時(shí)減小距離向壓制范圍和噪聲調(diào)制模板的慢時(shí)間頻譜寬度時(shí),如圖4(a)所示,干擾壓制面積將不斷縮小,干擾能量愈發(fā)集中,對(duì)局部場(chǎng)景的掩護(hù)效果也會(huì)越好,如圖4(b)所示。特別地,當(dāng)壓制面積僅為20 m×50 m時(shí),指定的局部場(chǎng)景則被徹底壓制,如圖5所示。

圖3 距離向偏移量?Rshift=?242 m,壓制面積300 m×400 mFig.3 Range offset ?Rshift=?242 m,suppression area 300m×400 m

圖4 距離向偏移量?Rshift=?142 m,壓制面積100 m×200 mFig.4 Range offset ?Rshift=?142 m,suppression area 100 m×200 m

圖5 距離向偏移量?Rshift=?167 m,壓制面積20 m×50 mFig.5 Range offset ?Rshift=?167 m,suppression area 20 m×50 m
通過(guò)以上實(shí)驗(yàn)結(jié)果對(duì)比可知,本文所提的干擾方法成功實(shí)現(xiàn)了在固定干擾機(jī)下對(duì)壓制面距離向位置和方位向范圍的靈活控制,有效彌補(bǔ)了傳統(tǒng)噪聲卷積調(diào)制干擾滯后于干擾機(jī),方位向能量分散的缺陷,提高了干擾能量的利用率,與理論分析相一致。
4.2 偵察誤差對(duì)干擾效果的影響
為反映干擾對(duì)偵察參數(shù)的敏感性和依賴性,這里以圖5(b)為基準(zhǔn),考慮較大誤差的惡劣情況:kr的相對(duì)偵察誤差為30%,v,λ和R0的相對(duì)偵察誤差為50%,干擾結(jié)果如圖6所示。相比于無(wú)誤差的干擾結(jié)果,由式(20)可計(jì)算得kr的誤差將導(dǎo)致干擾超前約50 m,干擾的起始位置為4825 m,如圖6(a)所示;由式(21)可計(jì)算得v的誤差將導(dǎo)致壓制面的方位向范圍展寬到30 m,如圖6(b)所示,而λ和R0的誤差將導(dǎo)致壓制面的方位向范圍縮小到13 m,如圖6(c)和圖6(d)所示。由此可知,即使在偵察誤差較大的情況下,本文所提的干擾方法依然能完成對(duì)局部場(chǎng)景的有效壓制,仿真結(jié)果與理論分析相一致。
4.3 干擾增益驗(yàn)證
為進(jìn)一步驗(yàn)證本文所提干擾方法相比于傳統(tǒng)噪
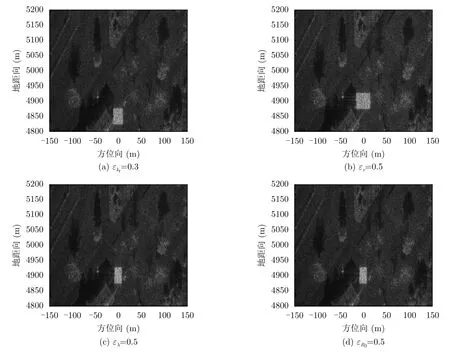
圖6 偵察誤差下的干擾結(jié)果Fig.6 The jamming results under reconnaissance error
聲卷積調(diào)制干擾的增益情況,表1記錄了移頻量為零時(shí),噪聲模板的不同快時(shí)間寬度和慢時(shí)間單邊帶寬對(duì)干擾所獲增益的影響情況。可以看出,對(duì)于傳統(tǒng)噪聲卷積調(diào)制干擾,當(dāng)不斷減小噪聲模板的快時(shí)間寬度時(shí),其干擾所獲增益不斷增大,因此對(duì)局部場(chǎng)景的壓制效果也將越好,與圖2的實(shí)驗(yàn)結(jié)果相吻合。而對(duì)于本文所提的干擾方法,當(dāng)不斷減小噪聲調(diào)制模板的快時(shí)間寬度和慢時(shí)間帶寬時(shí),其所獲的增益也將不斷增大,因此其對(duì)場(chǎng)景的壓制效果也會(huì)越好,與圖3—圖5的實(shí)驗(yàn)結(jié)果相吻合。特別地,在相同的距離向壓制范圍(快時(shí)間寬度為2.4×10?7s)條件下,由于減小了噪聲模板的慢時(shí)間帶寬,本文所提干擾方法獲得的增益比傳統(tǒng)噪聲卷積調(diào)制干擾提高了約 13 dB,干擾能量更加集中,有效提高了能量利用率,實(shí)驗(yàn)數(shù)值與理論數(shù)值幾乎相等,驗(yàn)證了文中理論分析的正確性。
5 結(jié)束語(yǔ)
本文在傳統(tǒng)噪聲卷積調(diào)制干擾的基礎(chǔ)上,提出了對(duì)SAR的干擾新方法:干擾方通過(guò)設(shè)置噪聲調(diào)制模板的快時(shí)間寬度和慢時(shí)間帶寬,直接控制干擾的壓制面積;結(jié)合移頻調(diào)制,實(shí)現(xiàn)對(duì)干擾距離向位置的控制,有效彌補(bǔ)了傳統(tǒng)噪聲卷積調(diào)制干擾存在的距離向位置滯后,方位向壓制范圍不可控的缺陷。文中首先建立了干擾的信號(hào)模型,推導(dǎo)出了其壓縮結(jié)果的解析表達(dá),并基于此對(duì)干擾的壓制范圍進(jìn)行了詳細(xì)分析;接著,文中從偵察誤差影響、功率增益以及算法復(fù)雜度3個(gè)方面對(duì)所提干擾方法的性能情況作了理論論證。實(shí)驗(yàn)結(jié)果表明本文所提的干擾方法可有效實(shí)現(xiàn)對(duì)干擾的距離向位置和壓制面大小的靈活控制,即使在較大偵察誤差下仍能完成對(duì)局部場(chǎng)景的要地掩護(hù),且相比于傳統(tǒng)噪聲卷積調(diào)制干擾,其在相同條件下所獲的增益更大,對(duì)要地的掩護(hù)效果更好。

表1 干擾增益對(duì)比Tab.1 The comparison of jamming gain