波浪作用下中上層浮魚礁動力響應數值模型建立方法
2020-10-24 02:00:42施圣鈐沈良朵桂福坤
海洋工程 2020年5期
潘 昀,劉 燦,楊 熙,施圣鈐,沈良朵,桂福坤
(1. 浙江海洋大學 港航與交通運輸工程學院,浙江 舟山 316022; 2. 浙江海洋大學 國家海洋設施養殖工程技術研究中心,浙江 舟山 316022)
南方海洋牧場環境因子不同于北方海域,并且主要以魚、蝦、蟹、頭足類等高級消費者為增養殖對象,因此海洋牧場建設的模式應以浮式魚礁、養殖筏式、養殖網箱等中上層人工生境構建為基礎[1],增殖天然餌料、養殖藻場和創造魚類保育場,為魚類產卵和幼體庇護提供良好的棲息環境。農業部印發的《國家級海洋牧場示范區建設規劃(2017—2025)》中提出:截止到2025年,規劃在東海區共建設20個國家級海洋牧場示范區(包括2015—2016年已建情況),形成示范海域面積500多平方千米,其中建設人工魚礁區面積160平方千米,投放人工魚礁500多萬空立方米。可見,國家高度重視和大力支持東海沿海地區海洋牧場建設,而如何選擇浮魚礁類型、確定投放布局、保證結構安全和材料安全、保證聚魚和庇魚效果是科學創造魚類產卵場和保育場的重要前提。
日本是最早研究和使用中上層浮魚礁的國家,指出浮魚礁一般由浮力系統、礁體系統、錨泊系統三部分組成[2-3],日本和韓國近年來也設計和投放了用于近海的典型中上層浮魚礁結構型式[4-5]。浮力系統構件主要為浮管和浮球組合而成,提供浮魚礁的浮力同時也是波浪荷載的主要來源;礁體部分一般由剛性鐵或者塑料框架覆蓋網衣、塑料薄膜、帆布構成,網衣的透水性和柔性較大,且宜附著藻類生物為魚群營造產卵場所和索餌區,更受青睞,也是荷載的來源;不同的錨泊方式對浮魚礁的運動特性影響較大,需要搭配最佳的浮力和配重才能更好的發揮對浮體的系留作用,各系統之間及構件的協調、搭配非常關鍵。中上層浮魚礁投放于近海,屬于海岸工程范疇,因此,進一步開展中上層浮魚礁結構安全、性能穩定、系統構成合理搭配的研究以及其抗浪機制的研究,對設計和投放人工浮魚礁具有重要的意義。
近年來用于海洋漁業增殖的浮魚礁也出現了新的結構型式[6],并進行少數單體投放和聚魚效果評估,但針對海洋水動力學特性方面的安全和穩定性能以及浮魚礁群布設方式等諸多工程基礎問題和技術均少有報道和論文發表。浮魚礁的浮力系統主要由浮球或浮管排列組合而成,魚礁主體由綱繩和網衣編織而成,結構型式與養殖網箱非常類似。Hou等[7]、Huang等[8]、Bai等[9]、Zhao等[10]、Gui等[11]、Moe-F?re等[12]、Strans等[13]長期致力于網箱結構型式、網箱浮架運動、錨系方式、網箱容積變化的研究,才解決了網箱柔性結構在波浪和潮流作用下體積縮小及結構安全問題,確保網箱在不同海洋環境下滿足設計要求。這些均為波浪作用下的浮魚礁動力響應研究提供了保障,與網箱結構形式不同的是中上層浮魚礁必須保持一定的高度和姿態才能作用于周圍水體的魚群[4],垂向尺寸往往比水平尺寸大5~10倍,并且中上層浮魚礁多使用單錨系泊[4, 14-15](可群化投放)。數值建模方法與之不同的是復雜浮體結構轉動慣量及轉動變換布萊恩角的求算,以及中上層浮魚礁各構成組件連接位置處點或單元的相互耦合受力和運動處理方法,這是研究的重點。
1 數值模型建立
中上層浮魚礁各組成要素之間通過熱熔和系縛方式進行連接,因此整體浮魚礁的運動數值模型建立的關鍵就是連接位置處點或單元的處理。首先介紹圓管浮架、網衣、錨繩等組成要素單獨波浪作用下受力和運動的數值計算,而后重點介紹三者之間相互耦合受力和運動的處理方法。
波浪作用下浮架、網衣及錨繩運動數值模擬方法分剛性和柔性兩種情況,浮架為剛性結構,運動包括平動和轉動,而網衣和錨繩為柔性結構,運動形式表現為拉伸和懸浮運動。數值模型主要采用莫里森方程計算劃分單元和集中質量點的受力,進而獲得整體結構的合力和繞質心的力矩,而后離散時間獲得結構的運動狀態和受力變化。
1.1 圓管浮架受力和運動
浮架采用HDPE管道熱熔焊接,在小尺度范圍內可認為管道為剛性,能夠維持設計形狀。由于波浪沿水深方向水質點速度和水質點加速度逐漸減小,因此以浮體的質心為中心,上部所受水平波浪力大于底部所受水平波浪力,這將導致浮魚礁礁體發生轉動。對浮架進行有限單元劃分后再計算單元的波浪力,能夠準確刻畫這一現象。
1.1.1 浮架受力和單元劃分
圓管浮架在波浪作用下的主要受力包括重力、浮力、波浪力以及網衣和錨繩的拉力。當圓管的直徑與波長的比值小于0.2時,波浪力可使用莫里森方程計算。至于運動的圓柱桿件波浪力(包括拖曳力和慣性力)的計算以及水動力系數的選取在文獻[16]中有較詳細的介紹。當浮架發生轉動后,波浪水質點速度方向、水質點加速度方向與圓管桿件之間的夾角發生變化,需要在圓管單元上建立局部坐標系,具體可參見文獻[16]。
與文獻[16]不同的是,此次建立的是三維浮架運動模型并且其周圍纏繞網衣,如圖1和圖2所示。以浮架的正視面ABCD為例,為了保證網衣網目恰好完整地系縛在圓管上,水平方向AB和CD及AD和BC圓管的單元劃分需要滿足網目的尺寸大小。陳天華等[17-18]常采用水平縮結系數0.66(網目水平對角線長度與目腳長度2a=8 cm的比值)和垂直縮結系數0.75(網目垂直對角線長度與目腳長度2a=8 cm的比值)的網目形狀。如果網目群化技術[17-18]采用8×8,那么網目的水平長度為0.422 4 m和垂直長度0.480 0 m。圖1給出了框架浮體一個面的劃分單元方式,網目系縛在圓管的奇數單元上,因此水平方向單元的長度為0.211 2 m,垂直方向單元的長度為0.240 0 m。圖1中,每個方格表示一半單元長度的物理量(單元質量、波浪場位置處的水質點速度和水質點加速度、計算力臂的位置等)集中點。因此在三維模型中,除四個端點(A、B、C、D)處相鄰三個單元結點,其余單元結點僅左右相鄰兩個其他單元結點。
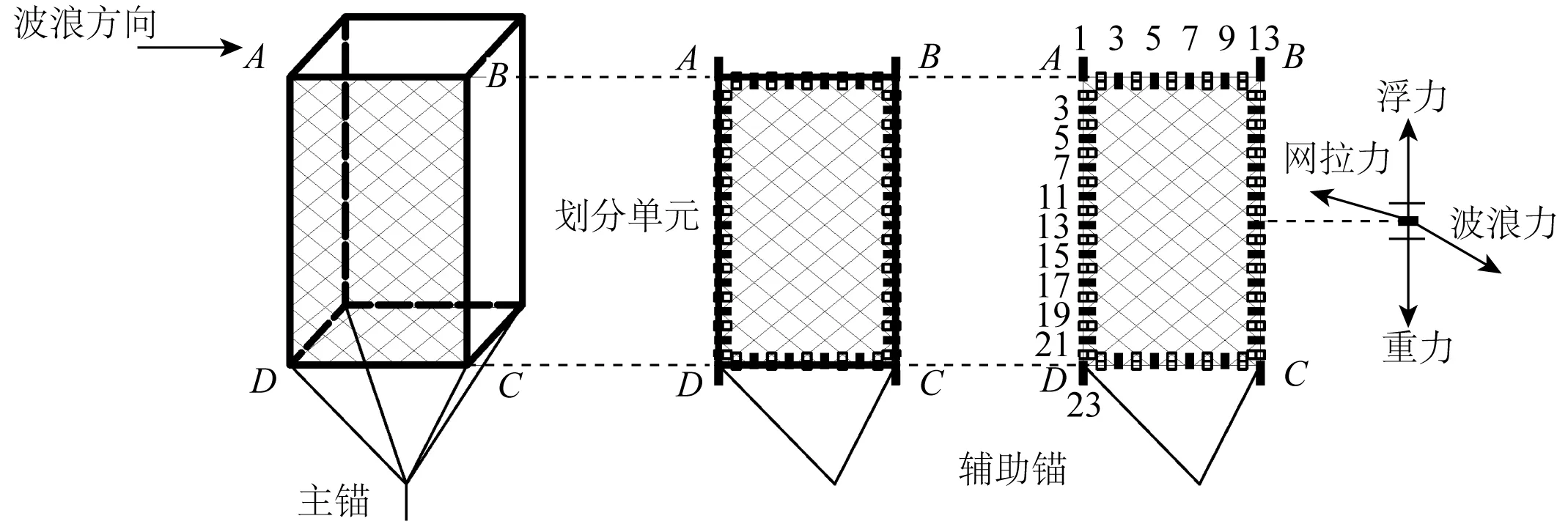
圖1 浮架單元劃分及其受力示意Fig. 1 Division and force analysis of the floating structure
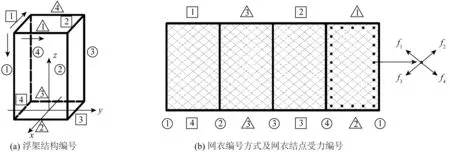
圖2 浮架與網衣計算方法Fig. 2 Calculation method of the floating structure and netting
模型中,整體坐標原點建立在浮架的中軸線上,z=0與靜水面重合,x、y和z軸的正方向如圖2(a)所示。給定浮架的初始位置坐標分三種情況:一種是與z軸平行的圖2(a)中圓形標號1~4號圓管,計算程序編寫的數組編號方向為自上而下,如P1(ibar,4,3),其中ibar表示劃分的ibar個單元點,4表示此類圓管的編號,3表示三維整體坐標x、y和z值;另一種是與x軸平行的圖2(a)中方形標號1~4號圓管,數組編號的方向為自前而后,如P2(jbar,4,3),其中jbar表示把此類圓管劃分成了jbar個單元點;第三種是與y軸平行的圖2(a)中三角形標號1~4號圓管,數組編號的方向為自左而右,如P3(jbar,4,3),數字意義與前述一致。
1.1.2 浮架運動
浮魚礁的浮架周圍系縛纏繞網衣,在4根輔助錨和1根主錨的牽引下,浮架的運動包括平動和轉動。根據剛體運動的速度和加速度合成原理,對于剛體在固定坐標系(絕對坐標系)中的運動速度和加速度實際上就是牽連速度和牽連加速度,包括平動和轉動兩部分。
1) 計算平動
先不考慮浮架轉動,在整體坐標系下將浮架所有單元的受力進行累加,如圖1主要包括波浪力、網拉力、浮力、重力,而后根據牛頓第二定律獲得浮架的加速度,如式(1):

(1)
式中:M表示浮架的總質量,ΔM表示浮架各單元慣性質量和(某一單元的體積為Vvolume,取拖曳力系數為CM,則慣性質量為Δm=ρwater(CM-1)·Vvolume);aframe1表示框架浮體的平動加速度;T表示錨繩對框架的拉力;FD、FI分別表示浮架的合成拖曳力和慣性力;G表示浮架的重力;Ffloat表示浮架的浮力;Vframe表示浮架的平動速度,V0為框架浮體的初始速度或上一時刻的速度。
2) 浮架轉動慣量公式推導
正確計算浮架的轉動慣量,是計算其轉動的前提。如圖2(a)坐標系,相對于整體坐標系原點而言,以剛體的質心作為動坐標的原點可進行轉動計算。根據平行軸定理,把浮架的12根圓管的轉動慣量分x、y、z三個方向平移至質心處。如圖2(a)所示,構成浮架圓管可分為三類,即圓形標號1、方形標號1、三角形標號1。假設圓管單位長度的質量為m,圓標號1劃分為ibar個單元結點,每個單元的長度為Lvertical,方形標號1和三角形標號1均劃分為jbar個單元,每個單元的長度為Llever,那么三類圓管的轉動慣量平移至浮架質心處的計算表達式為式(2)~(3)。
圓形標號1圓管的x、y、z三方向轉動慣量平移至質心處:

(2)
方形標號1圓管的x、y、z三方向轉動慣量平移至質心處:

(3)
三角形標號1圓管的x、y、z三方向轉動慣量平移至質心處:Ix3=Iy2,Iy3=Ix2,Iz3=Iy3。因此,浮架總的x、y、z三方向轉動慣量為:Ix=4(Ix1+Ix2+Ix3),Iy=4(Iy1+Iy2+Iy3),Iz=4(Iz1+Iz2+Iz3)。式(2)和式(3)中的rbar為浮架所用圓管的半徑,所有物理量均采用國際單位制計算。
3) 計算轉動
剛體的轉動是相對于整體坐標系原點而言,一般常取整體坐標系剛體的質心作為動坐標的原點進行轉動計算。具體計算轉動的方法和步驟如下:
(4)
式中:M為框架浮體的總力矩;F為第i單元上所受的合力;Ri為第i單元相對于質心轉動的力臂。

(5)
式中:I為浮架的轉動慣量,aframe2表示浮架繞質心轉動的角加速度,wframe表示浮架繞質心轉動的角速度,w0表示浮架的初始角速度或上一時刻角速度,θ表示Δt時間內浮架轉動的角度。
根據布萊恩角計算公式[10-11, 16]可知,三維情況下Δt時間內框架浮體轉動的角度與該時刻的布萊恩角相等。具體浮架的轉動和平動的合成,即動坐標系和整體坐標系的轉化公式如下:
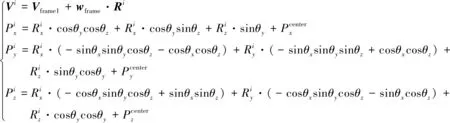
(6)
式中:Vi為浮架第i單元整體坐標系下的速度,由于每個單元Vframe和wframe均相等,所以無需使用i進行標記;P*i為浮架第i單元整體坐標系下的x、y、z坐標,依次為Pxi、Pyi、Pzi,P*center為浮架質心位置整體坐標系下該時刻的坐標;θx、θy、θz表示x、y、z軸的布萊恩角。
1.2 網衣受力和運動
假定網衣是由有限的無質量彈簧連接的集中質量點所構成,通過計算集中質量點在波浪和浮架、錨繩作用下的位移,得到網衣的受力和形狀[16-18]。網衣的集中質量點設于每個網目目腳的兩端,每個集中質量點包含網目的1個網結和2個目腳,如圖2(b)所示,其中任意集中點4根網線的拉力沿順時針方向依次命名為f1~f4。關于單獨網衣的受力和運動可參見文獻[17-18],其中給出了詳細的網目群化技術、集中質量點法、網目局部坐標建立等介紹,此處不再贅述。
下面主要介紹網衣網目恰好完整地系縛在浮架周圍上的處理方法以及系縛點位置網線拉力的計算方法。如圖2(b)為浮架沿圓形標號1圓管展開后的結果,為了建模方便和使用一片網衣的思路,網衣的儲存變量形式為Pnet(ibar,1+4(jbar-1),3),由于方形標號和三角形標號圓管連接端點有三處重復,所以網衣的列數應為1+4(jbar-1),ibar、4jbar的意義與上述一致。為了統一所有網目結點(質量集中點)均有相同數量拉力的網線,網衣系縛點并不集中質量,而是集中在如圖2(b)實心圓點處,因此這些點中四角的端點集中了3.5倍的單根網線質量以及其他點集中了3倍的單根網線質量。與之對應,平行于x和y軸的圓管上的系縛點受到相鄰網衣結點f1和f2的拉力,而平行于z軸的圓管上的系縛點受到相鄰網衣結點f1和f3、f2和f4的拉力。依次根據系縛點(浮架劃分單元點)的坐標和網目結點的坐標分解網線拉力即可求出系縛點受力的矢量和。
如圖2(b),平行于x和y軸的圓管的單元點編號和數量(jbar)與網衣不同,式(7)給出了它們之間的轉換關系,此關系是計算網衣和浮架的連接點(系縛點)各物理量的關鍵。

(7)
式中:jp2和jp3依次對應方形標號和三角形標號圓管的編號下標up和down依次表示圖2(b)中上層圓管和下層圓管。j為任意網衣的列編號,其值為1~1+4(jbar-1)。
1.3 錨繩受力和運動
錨繩的數值模擬方法相對較成熟,采用集中質量點法把錨繩劃分成假設用無質量彈簧連接的球點可較好的描述錨繩的受力和運動,與彈簧受力不同的是錨繩僅在大于原長時才受力,如式(8)所示。錨繩集中質量點受力和計算與網衣網目相似,主要包括重力、浮力、錨繩拉力、波浪拖曳力及波浪慣性力等[16-18],具體計算公式見式(8)。

(8)
式中:Manchor表示錨繩質量點的質量,ΔManchor表示錨繩質量點增加的慣性質量;aanchor表示錨繩質量點的運動加速度;Tanchor表示錨繩質量點的三個方向的矢量拉力,而Tanchor表示相鄰錨繩質量點因拉伸產生的標量拉力值;FD-anchor、FI-anchor分別表示錨繩質量點的拖曳力和慣性力;Ganchor表示錨繩質量點的重力;Ffloat-anchor表示錨繩質量點的浮力;l0為錨繩原始長度,l為變形后的長度;C1、C2為錨繩材料彈性系數;d為錨繩的直徑。
錨繩與浮架、錨繩與錨繩連接點的模擬方法需要特別處理,針對任一根錨繩連接點一定在錨繩首、尾質量點處,模型建立時儲存數組仍保存錨繩首、尾質量點的物理量,但某時刻內僅計算一次錨繩首、尾質量點,待該時刻所有其他質量點和單元計算完成后,查找相應連接點代替保存未計算錨繩首、尾質量點的物理量(位置坐標、速度等)。文中涉及到兩種浮架的錨泊方式,以圖3為例,一種系縛浮架的四角端點直接連接至海底,另一種先采用小直徑的輔助錨繩系縛浮架的四角端點,再連接一根大直徑的錨繩后至海底。第一種錨泊方式中,每根錨繩的首、尾點形式相同,尾點本身就固定于海底,首點與浮架的四角端點運動物理量重復,因此在模型中均不參與計算。待某時刻浮魚礁運動物理量全部計算完成后,把浮架的四角端點運動物理量直接賦值于錨繩的首點。第二種錨泊方式采用大、小兩種直徑的錨繩,4根輔助錨繩的尾點也是主錨繩的首點,因此在模型中4根輔助錨繩的首、尾點和主錨繩的尾點均不參與計算,單獨篩選出主錨繩的首點進行計算,具體受力如圖3(b)所示。待某時刻浮魚礁運動物理量全部計算完成后,把浮架的四角端點運動物理量直接賦值于四根輔助錨繩首點,而把主錨繩的首點物理量賦值于輔助錨繩的尾點。這樣處理的好處主要體現在對每類浮魚礁構成元素的描述均相同,能夠較方便地實現模型橫向拓撲及后處理。

圖3 兩種錨泊方式計算方法Fig. 3 Calculation method of the two patterns of mooring
1.4 出水條件的判別方法
波浪作用下中上層浮魚礁的運動位置在波谷處時,浮魚礁各計算質量點或單元可能發生出水情況。出水條件下將導致浮魚礁組成元素質量點或單元不受浮力和波浪力,因此數值模型的建立需要進行出水條件的判斷。判斷方法即浮魚礁各計算質量點或單元的z坐標與波面的關系,如式(9)所示。當z大于η,水質點速度和加速度均為0,相應計算質量點或單元所受浮力為0;當z小于或等于η,考慮波浪水面變化的相對水深修正,如式(10)所示把z修正為zd,根據線性波理論[16]進行計算。計算修正后的zd位置的波浪水質點參數更符合出水條件下實際情況[18]。
=acos(ky-ωt)
(9)
(10)
式中:以靜水面位置為x軸,垂直向上為z軸,規定波浪沿y正方向傳播;η為水面變化,a為波浪振幅,k為波數,ω為圓頻率;dwave為水深,zd為修正后的位置坐標。
特別指出,雖然出水條件下浮魚礁各計算質量點或單元位置處的水質點速度和水質點加速度為0,但計算運動質量點或單元拖曳力的莫里森公式中采用的是質量點或單元相對速度(水質點速度減質量點或單元速度),而該時刻的質量點或單元速度一般不為0,需要進一步地判斷,強制賦值為0。
2 數值模型驗證
獲取驗證資料的途徑主要有現場資料的采集和物理模型試驗,由于文中設計的浮架式中上層浮魚礁尚未在海區現場投放,所以采用物理模型試驗的方法驗證數值模型的正確性。由于浮魚礁的運動狀態是其在波浪作用下各種力共同作用的結果,為了方便和簡化試驗,選擇4根相同錨繩的錨泊方式,并且保證浮魚礁不出水,僅以浮魚礁上一點的運動變化驗證數值模型的正確性。
2.1 物理模型制作
針對浮架的物理模型需要滿足幾何相似、動力相似、運動相似,忽略圓管的剛度相似問題,即在原型中認為圓管為剛性結構。為保證浮架模型和原型之間重力和慣性力的相似,應滿足弗勞德數Fr相等[19]。因為波浪作用下浮架的受力和運動帶有周期性變化,還應保證周期性相似,即滿足斯特勞哈爾數相等,如式(11)所示。為保證網衣水動力相似,物理模型制作中應選擇網目較大的網衣,避免因網目過小導致的水流不相似問題。錨繩主要滿足彈性相似,可人工添加橡皮筋增加錨繩模型的彈性。
(11)
式中:V*、L*、T*為浮體結構的特征速度、特性線尺度、周期,下標m和p表示模型和原型。依據上述相似準則,可推得原型與模型各物理量之間的比例關系,參見表1。
浮架使用PVC管、接頭和PVC膠黏接而成,除上下兩面以外,其他面周圍纏繞網衣,錨繩分別系縛在浮架的下底面端點。綜合考慮波浪水槽尺度32 m×0.8 m×1 m(長×寬×高)和實際海洋牧場海區面積,選取λ=20,建立物模模型的具體結構參數見表2,實物如圖4。其中,表2中CD、CI、C1、C2等為計算浮架、網衣、錨繩波浪力的主要參數,具體取值參考Zhao等[9-10],桂福坤[16],陳天華等[17-18]的研究。
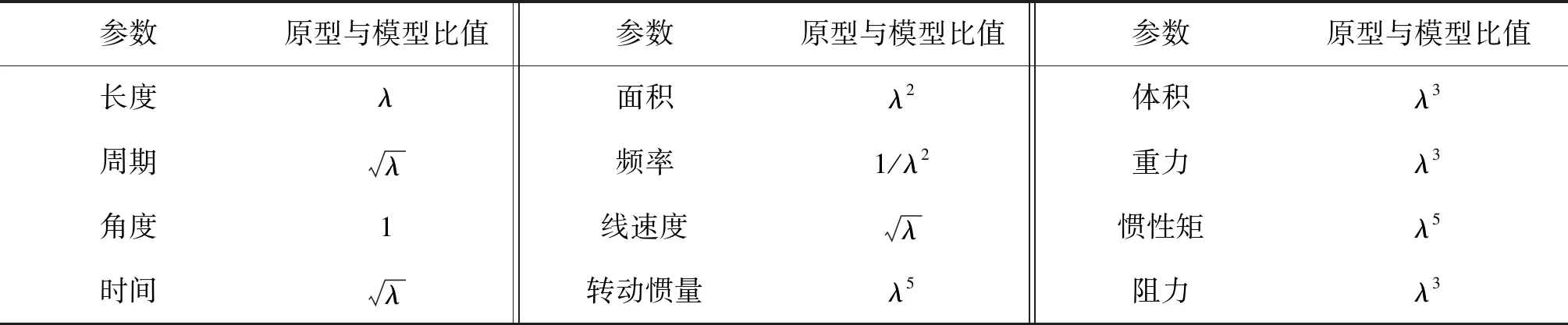
表1 原型與模型各參數間的比例關系Tab. 1 Proportional relationship of parameters between prototype and model
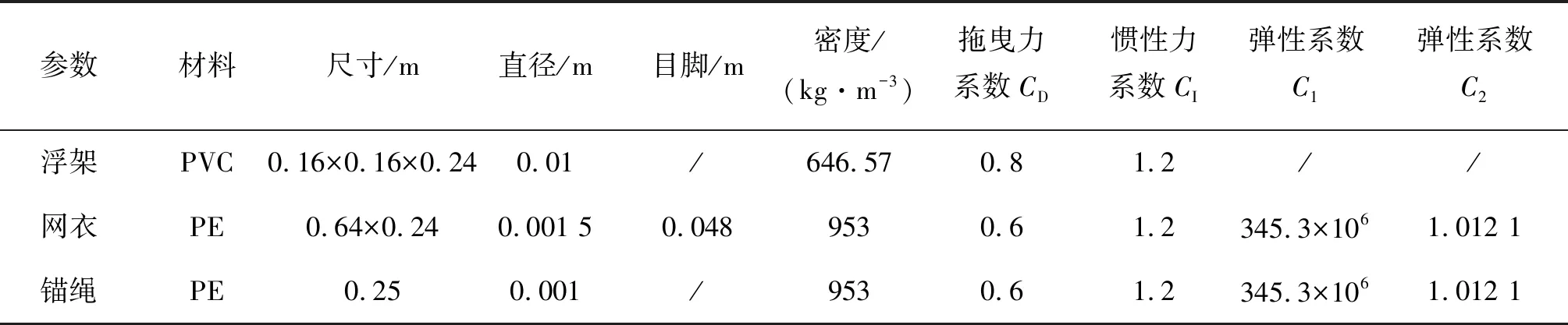
表2 物理模型制作參數Tab. 2 Physical model setting parameters
2.2 物理模型試驗
物理模型試驗在波浪水槽中進行,水深0.75 m,波浪周期為1.1 s、1.4 s、2.1 s、4.0 s,對應波浪高度為4.58 cm、16.63 cm、11.23 cm、18.36 cm,共四組波浪條件,如表3所示。波浪條件以圖4中浮魚礁模型上方的波高儀實測統計得出。利用CCD(charge coupled device,電荷耦合元件)相機采集圖4中示蹤點(發光二極管)連續的圖像,編寫程序對圖像進行分析,獲得模型運動變化。圖像采集幀率會影響數據后期分析的準確性,幀數越多,示蹤點運動軌跡越準確,試驗結果精度越高,幀數取10幀每秒即可滿足要求。因此,試驗記錄時間為120 s,幀數為10幀每秒,每種波況平行重復做3次。
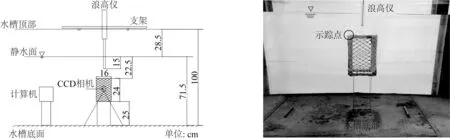
圖4 浮魚礁物理模型試驗布置Fig. 4 Experiment layout of a floating fish attractor in a flume
開始造波前,浮魚礁處于靜止狀態,選擇浮魚礁模型此時的位置作為參考標準,利用Matlab將不同時刻示蹤點的位置標記在同一張圖片上,即得到示蹤點運動軌跡。使用游標卡尺測量浮魚礁箱體管道之間的距離,同時計算浮魚礁在水中靜止狀態該距離之間像素點個數,得到一個像素點空間中實際長度(距離/像素個數),在箱體不同位置重復多次計算,取平均值后一個像素在空間中表示長度為0.448 mm。先對CCD黑白圖像進行灰度處理,得到各個像素點灰度值范圍在0~255之間的灰度圖片,其中黑色為0,白色為255。在白色點(255)周圍還有像素為254、253的像素點,文中只對像素灰度值為255的像素進行計算[20]。
2.3 結果對比驗證
以λ=20,按照表1中各參數間的比例關系建立浮魚礁數值模型,計算出示蹤點位置的運動軌跡后,再以λ=20縮小至物理模型尺度,物理模型試驗和數值模擬的示蹤點位置軌跡對比見圖5,最大正、負向偏移和最大垂向偏移的對比見表3。選擇水深計算相對誤差率的原因是浮魚礁礁體的運動與錨繩的彈性形變相關。相同力條件下,錨繩越長,形變量越大,而水深決定著錨繩的長度。

表3 波浪要素及試驗結果對比Tab. 3 Parameters of wave cases and experiment results analysis
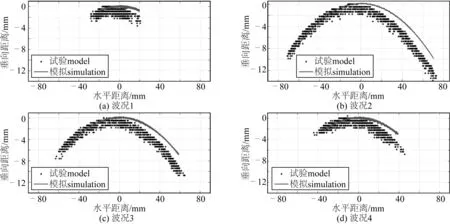
圖5 不同工況下物理試驗與數值模擬示蹤點運動軌跡對比Fig. 5 Movement tracks of the trace points of physical experiment and numerical modeling under four group waves
根據表3和圖5,對比物理模型試驗和數值模擬結果發現,物理模型試驗運動結果在水平方向上大于數值模擬結果;垂直方向上,左側部分驗證較好,右側部分數值模擬結果大于物理模型試驗。以波浪條件的水深作為特征長度得到的水平方向和垂直方向的最大偏移相對誤差率在0.03~0.16之間。造成誤差的主要原因是水槽長時間造波存在反射現象,以及物理模型制作時還使用了細鐵絲系縛網衣,數值模型中并未考慮。綜合考慮,建立的數值模型能描述浮魚礁在波浪作用下的運動情況,也間接的驗證了網衣和錨繩的受力。
3 中上層浮魚礁動力響應特性
中上層浮魚礁在波浪作用下可能為出水,因此根據第一節描述的數值方法計算了實際尺寸的浮魚礁運動和受力變化,其中錨泊為圖3中輔助錨和主錨相結合的方式。根據表2參數,浮魚礁數值模型尺寸以λ=20還原實際大小。浮架尺寸為1.69 m×1.69 m×4.8 m,圓管的直徑為0.2 m,密度相同;網衣的直徑0.003 m,目腳0.32 m;主錨繩直徑為0.02 m,輔助錨直徑為0.01 m,圖3中錨繩中間節點至浮架底部中心的距離為1 m;其余物理參數和計算參數均與表2中相同。根據舟山海域統計的5%累積頻率的波浪條件[21]為波高3 m,取水深12 m,波陡1/20,根據彌散方程計算的波周期為6.7 s,與文獻[21]統計的5%累積頻率的波周期6 s接近。
圖6給出了數值模型計算50 s后(浮魚礁運動已經穩定)的20 s內浮架左右擺動角度(波浪方向為正、波浪反方向為負)、錨繩拉力、網衣系縛點總拉力的歷時曲線(每0.1 s提取一個數據點)。可以得出,三者存在明顯的周期性變化,最大錨繩拉力和最大系縛點總拉力均出現在擺動角度突然變化的位置。如圖6中圓標識的位置,擺動角度負角度增大后驟然停止,致使錨繩拉力和系縛點總拉力達到最大且變化紊亂。圖6中矩形時刻為浮魚礁最大擺動角度,此時錨繩拉力最小,且與系縛點總拉力變化趨勢相反。圖7為最大擺動角度時刻的浮魚礁運動狀態及網衣受力分布,網衣受力僅在迎浪面和背浪面,并且拉力值遠小于錨繩拉力。因此浮魚礁擺動角度歷時曲線的光滑程度可以作為優化浮魚礁結構形狀和搭配浮體、配重的依據。
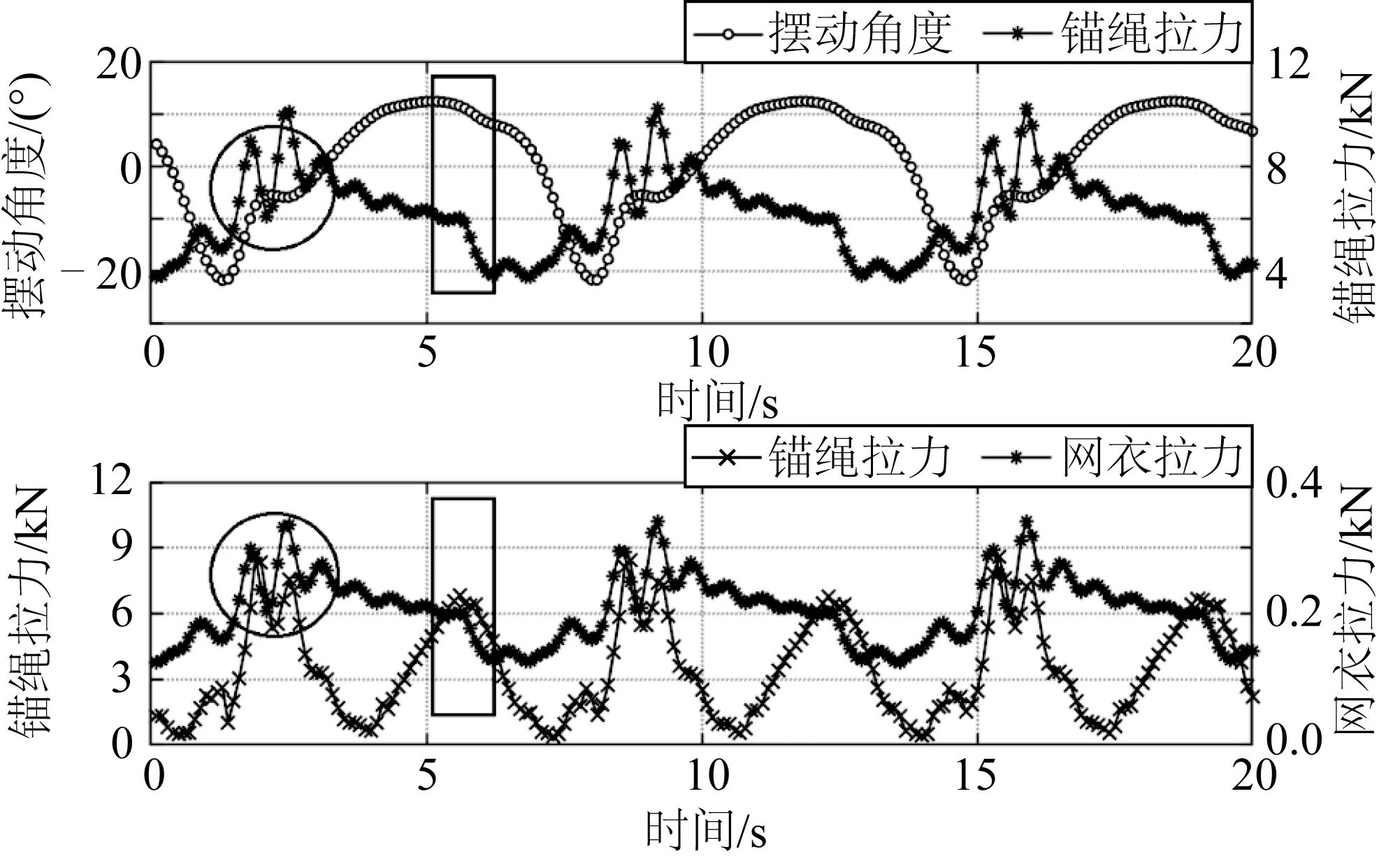
圖6 浮魚礁擺動角度、錨繩拉力、網衣系縛點總拉力歷時曲線 Fig. 6 Time-varying of the floating fish attractor pendulum angle, the anchor rope tension and total tension of the netting fixing points
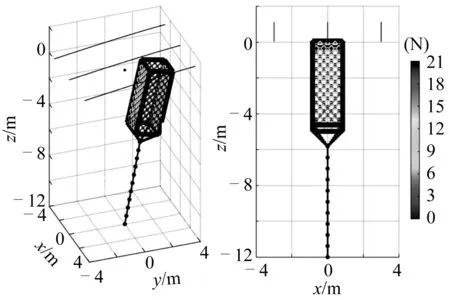
圖7 最大擺動角度時刻的浮魚礁運動狀態及網衣受力分布Fig. 7 Kinestate of the floating fish attractor and netting force distribution at the moment of maximum pendulum angle
4 結 語
根據有限單元法和集中質量點法,詳細闡述和推導了中上層浮魚礁各構成組件受力和運動模擬計算方法,整體浮魚礁各組件連接位置處點或單元的相互耦合受力和運動處理方法,以及浮魚礁出水條件的判別方法和水質點速度、加速度的修正方法。根據動力相似和運動相似制作了浮魚礁的物理模型,并進行了4組波浪條件的試驗,對比分析浮架上一點的運動軌跡,驗證了浮魚礁運動數值模型的正確性。最后建立了輔助錨和主錨相結合的錨泊方式的浮魚礁動力響應數值模型,通過分析浮魚礁擺動角度、錨繩拉力、網衣系縛點總拉力歷時變化。主要結論總結如下:
1) 浮魚礁水動力數值模型建立的關鍵是對其各組成要素的單元劃分和空間拓撲,文中采用由上而下的順序給出了一種集浮架-網衣-錨繩為一體的拓撲方式,以及浮魚礁運動和受力計算方法。該模型建立方法適用于小尺寸剛性和柔性結構物及其組合而成的復雜結構物的水動力特性分析。
2) 單錨系泊條件下浮魚礁的錨繩拉力與上層礁體運動相關,擺動角度驟然變化將導致錨繩拉力和系縛點總拉力達到最大值且變化紊亂。因此,浮魚礁擺動角度歷時曲線的光滑程度可以作為優化浮魚礁結構形狀和搭配浮體、配重的依據。
3) 單錨系泊條件下浮魚礁網衣的受力面主要為迎浪面和背浪面,并且系縛點總拉力遠小于錨繩拉力。因此,浮魚礁纏繞網衣在形成閉合空方體的同時,僅附加少量荷載,是浮魚礁設計的優選形式。
