基于EMD算法的機電系統故障診斷與辨識技術研究
2020-10-28 07:14:30張垚,王巧,洪峰,丁娟
無線電工程 2020年11期
張 垚,王 巧,洪 峰,丁 娟
(1.中國西安衛星測控中心,陜西 西安 710043;2.宇航動力學國家重點實驗室,陜西 西安 710043)
0 引言
天線系統作為雷達測控、衛星通信、遙感接收及深空探測等多類型航天地面裝備中典型的機電一體化設備,其運行的可靠性和關鍵部件一直以來都是研究的重點領域。文獻[1]通過對電機電樞電流信號的時域分析,實現直流電機轉子故障的檢測目標。文獻[2]提出了基于核主元分析的反向傳播神經網絡技術,采用經驗模態分解提取非線性特性,解決齒輪泵故障診斷的方法。文獻[3]采用基于信號分析方法、智能決策和軟件技術的綜合故障診斷技術,快速檢測自行火炮系統故障,降低人員維修維護難度。文獻[4]建立了測控系統永磁直流電機簡化模型,通過解調信號歸一化幅值及三相電流相位差獲取定子不對稱故障特征,實現電機設備的故障辨識與定位。上述方法對提高機電系統的故障診斷技術提供較好的借鑒。但對衛星地面站天線系統而言,受分布地域、外界環境和運行特點等方面的約束,要實現快速故障診斷、健康評估與辨識定位還是存在較大難度。文獻[5]對機電一體化系統的故障特點及故障診斷方法進行了分析梳理。在此基礎上還包括傳動軸承、旋變等轉動部件的結構磨損,傳動機構、饋源饋線、滑環及卷繞機構的無冗余備份機構等風險點,都是造成天線機電系統可靠性降低的重要因素。文獻[6]從系統建設的角度出發,提出構建離線與在線的綜合狀態監測方式,集信號采集、分析處理以及隔離定位的綜合故障診斷手段,并利用遠程網絡與虛擬儀器技術作為趨勢預測的輔助工具。
針對衛星地面站天線機電系統可靠性運行管理難點問題,提出了一種面向復雜天線機電系統的故障觀測與辨識算法,從提高系統故障檢測效率、改進故障辨識算法方面著手,提升系統故障診斷與辨識能力,為后續開展綜合健康管理系統提供技術途徑。
1 機電系統故障觀測模型設計
結合直流電機系統機電特性,在帶負載情況下的機械方程可表示為:
(1)
(2)
考慮電機電氣特性引入的約束方程為:
Rai(t)+Keω(t)=αu(t),
(3)
式中,i(t)為電機繞組中當前電流值;u(t)為電機輸出電壓;θ(t)為電機軸當前角度;ω(t)為電機轉子當前轉速;b為電機軸與負載之間摩擦系數;J為電機軸與負載的慣性矩;Ki為回轉矩常數;Ra為電機的電樞電阻;Ke為反電動勢常數;α為擴增常數;R為電機負載。
在不考慮電氣時間常數及電樞電感的條件下,正常狀態下的機電系統模型狀態空間方程可表示為:
(4)
(5)
當機電系統發生故障時,可通過檢測電機系統的執行器的狀態方程的變化情況實現狀態的異變檢測,通過狀態估計器實現故障辨識與判定。
機電系統力學方程為:
(6)
式中,Ms為彈力矩;Mm為電磁力矩;J為電樞慣量。
機電系統電學方程為:
(7)
式中,uin為施加電壓;i為電樞電流;ψ為磁通量;θ為位移;R為電阻。
由xi,xz,xf對部分變量進行替換:
那么,機電系統的力學與電學模型可表示為:
(8)
(9)
假設x=[i,θ,ω]T為狀態向量,y為輸入向量,u=[uin,Ms(0)]T為輸入變量,構建機電系統執行器的系統狀態方程為:
(10)
式中,A(i,z),B(i,z)為控制矩陣;C=[1 0 0];
可得,機電系統標準模型的狀態方程通過設計狀態觀測器進行數據分析,實現故障辨識與定位。
基于卡爾曼濾波時變線性遞歸特性,假設已知具有未知輸入的等價增廣狀態系統[12]為:
(11)

估計器的設計采用魯棒2級卡爾曼濾波器[7]來解決,經過一系列操作,可獲得魯棒2級濾波器為:
(12)
(13)

(14)
(15)
(16)
(17)
(18)
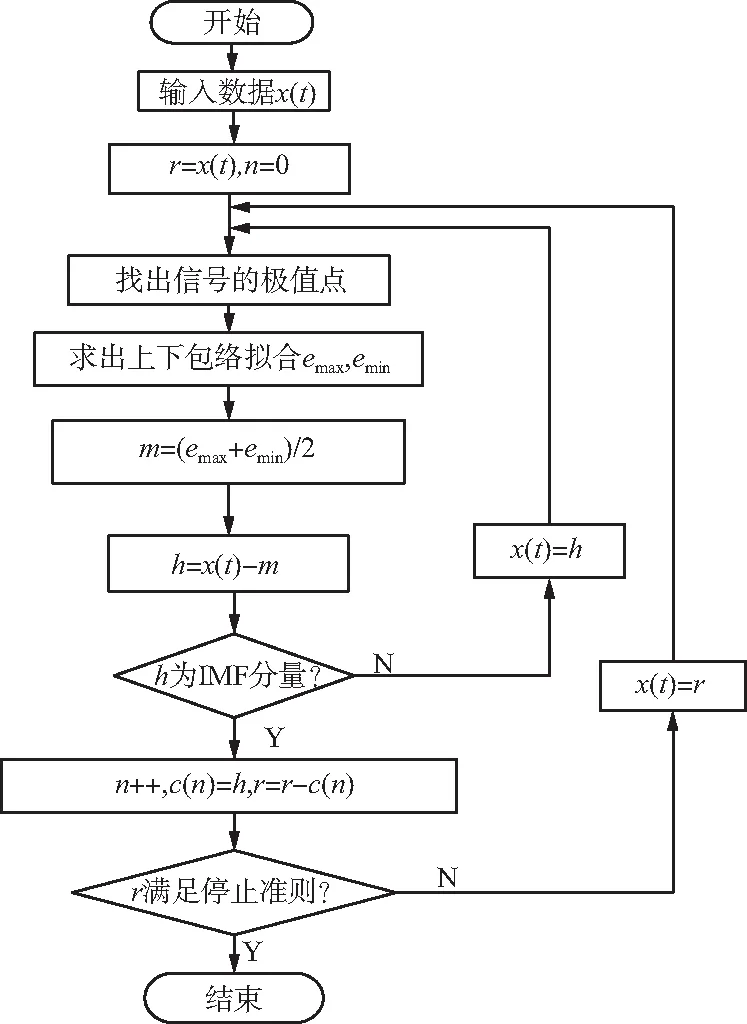
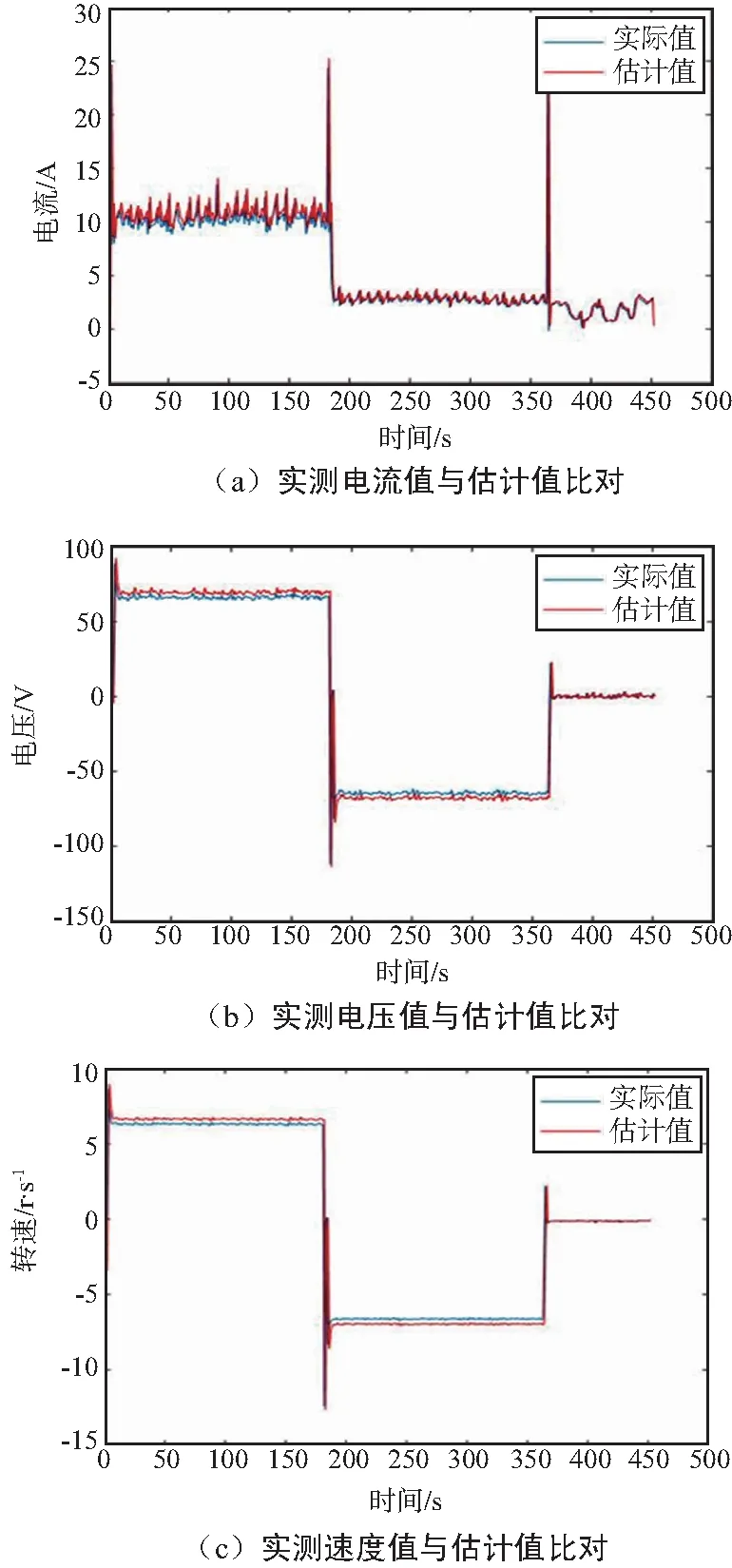
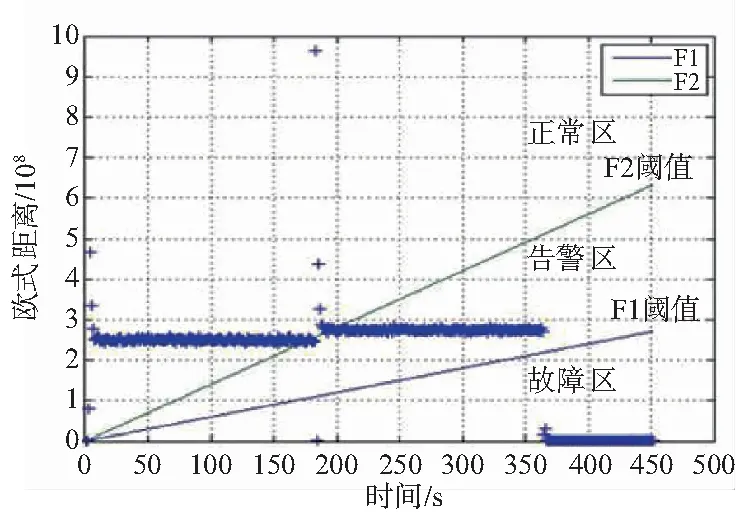
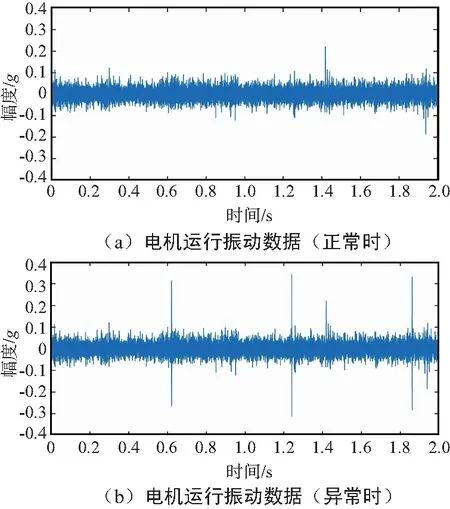
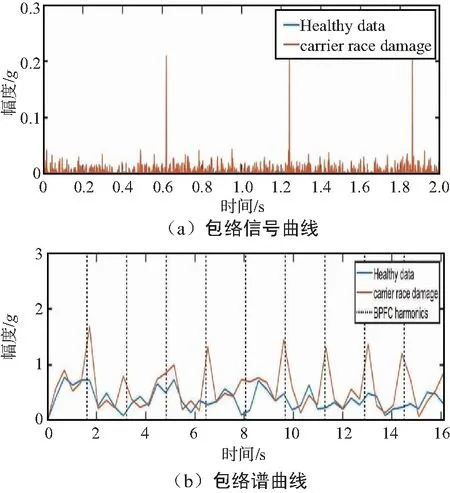
為了進行故障檢測與隔離,根據估計的速度狀態信息,利用歐氏距離法,可以將部件進一步進行故障區域劃分,分別定義了執行器電樞在時間t1和t2(t1 (19) (20) 根據執行器電樞的位移和動能方程,可以得到執行器電樞的歐氏距離為: F2=(Δz)2+(ΔE)2。 (21) 根據式(19)的計算結果和式(20)可以對執行器的故障進行檢測: (22) 式中,F1,F2分別為t1與t2時刻的歐氏距離,對正常狀態進行細化得到健康狀態。 為有效提取機電系統的故障特性,采用經驗模態分解(EMD)算法利用信號自身的局部特征信息進行自適應分解,得到一系列具有不同時間特征尺度的固有模態函數分量,克服了全域波變換中基函數容易選取不當的問題,能夠進行自適應的多分辨率分析,因此能夠得到更優的變換結果。 EMD算法可將原始信號分解為本征模函數和殘余量,并在不產生損失和失真的情況下,完成原始信號特性量的重構。該方法使得高低頻率能在不同的時間同時存在,很好地契合了軸承等機械結構振動信號非線性、非平穩的特點,達到了利用信號本身的特征把各種波動模式提取出來的目的。 在實際的信號分析中,一次分解計算所獲取的結果很難滿足具體的本征模函數要求。而為了達到所需目標,通常需要一個迭代分解,多次分解計算,逐步分解出達到要求的信號分量。 對于x(t)∈R1,分解的過程為[8-9]: ① 首先通過計算找到所有局部極大值點和極小值點。 ② 利用極大值點,采用插值或擬合方法計算信號上包絡emax(t),并利用極小值點計算出信號的下包絡emin(t),計算包絡平均值: (23) ③ 計算信號x(t)與包絡均值的差值: h1(t)=x(t)-em(t)。 (24) ④ 判斷h1(t),如果滿足本征模函數的2個條件,則認為h1(t)為第1個本征模函數;否則,就將h1(t)當作原始序列,重復①~③再判斷結果是否滿足本征模條件,若不滿足,則重復循環k次,得到h1k(t)=h1(k-1)(t)-emk(t),使得h1k(t)滿足本征模條件,記c1(t)=h1k(t),使得h1k(t)滿足本征模條件,記c1(t)=h1k(t),則為x(t)的第1個本征模函數[10]。 ⑤ 將c1(t)從x(t)中分離出來,然后再將余數r1(t)=x(t)-c1(t)當作原始序列。利用新得的原始序列重復以上步驟,得到后面的信號分量,記為c1(t),c2(t),…,cn(t),最后剩下原始信號的余項rn(t)。 ⑥ 分解后原始序列可表示為: (25) ⑦ 當分解求得的最后一個本征模函數cn(t)或剩余分量rn(t)變得比預期小時,或者剩余分量rn(t)變成單調函數時,可控制分解過程結束。 EMD信號分解流程如圖1所示。 圖1 基于EMD算法的信號分解辨識流程Fig.1 Signal identification process based on EMD algorithm 為了保證本征模函數保存足夠的物理實際的幅度和頻率,基于篩分準則,通過計算2個連續的處理結果之間的標準差的大小來實現: (26) 式中,T為信號的時間跨度;hk-1(t),hk(t)為經驗模態分解過程中2個連續的處理結果;Sd通常取值0.2~0.3[11],如果計算得到Sd小于規定的取值,就判定滿足停止條件,篩分過程停止。 (27) (28) 根據機電系統故障模型和觀測器模型,在機電系統正常工作過程中,人為植入電機滾動保持架磨損故障,對所給故障數據通過程序仿真,仿真結果如圖2所示。 圖2 機電系統運行工況變化曲線Fig.2 Condition curve of electromechanical system (1)故障檢測過程 由圖2可以看出,利用該故障模型與卡爾曼估計器可實現對觀測對象的實時跟蹤與估計。在183 s,電流、電壓與速度均發生了劇烈變化,說明系統工作異常,有故障發生跡象。當持續到365 s時,電流、電壓與速度值突變為零,說明由于故障的影響,系統已停止工作。 系統可通過構建的故障觀測模型,較為準確地跟蹤系統的運行狀態。根據設備電氣特性,選取健康狀態等級的邊界閾值F1=60,F2=140,利用式(19)~式(22)計算設備健康狀態等級的變化情況,如圖3所示。 圖3 機電系統健康狀態評估曲線Fig.3 Health status curve of electromechanical system 由圖3可以看出,在183 s時刻以前,被觀測對象工作正常;在183~365 s時刻,被觀測對象出現告警,持續到365 s時,被觀測對象因故障停止工作。 (2)故障辨識過程 機電振動傳感器檢測數據如圖4所示。 圖4 機電振動傳感器檢測數據Fig.4 Detection data of electromechanical vibration sensor 根據天線機電系統機理及關聯模型,可能造成設備故障的主要原因包括軸承松動、軸承內/外圈磨損、保持架磨損和滾子磨損等。由于機電系統不同部位發生故障時,其故障信號頻率的差異,故其在振動信號上的反映也不盡相同。為進一步分離故障點,提取設備運行告警期間(183~365 s)部分時段的振動傳感器檢測數據,并以保持架磨損故障為例進行故障辨識(其他類型故障可參照此方法)。 根據電機滾動軸承保持架的運行機理及特征頻率的本征模函數[12]: (29) 式中,m為滾子個數;fn為軸的轉頻;do為滾子直徑;D為軸承節徑;α為軸承壓力角。 通常,軸承發生疲勞剝落損傷時,在軸承運轉中會因為碰撞產生脈沖,其碰撞頻率等于滾動體在滾道上的通過頻率,采用EMD算法對故障信號進行信號包絡譜分析,如圖5所示。 圖5 包絡譜分析比對Fig.5 Comparison of envelope spectrum analysis 由圖5可以看出,通過輸入數據與包絡信號均值比較后得到的IMF分量,經分解、判斷后獲取振動信號的低頻分量,并將其與故障特征頻率的多次諧波的分布情況進行比對。經分析,可看到故障時振動信號的包絡譜曲線存在周期跳動現象,并與軸承保持架故障頻率BPFC及其諧頻點存在較強的吻合度,可判定因保持架磨損,從而發生異常振動現象,進而導致機電系統停止運行故障。該方法對于微小故障特征的快速辨識提取,具有較好的效果。 針對復雜天線機電系統的力學與電學特性,通過構建機電系統故障觀測模型,采用基于EMD算法的故障辨識技術,實現了對復雜系統運行狀態的實時監測、趨勢估計、故障辨識以及健康等級判定,為后續開展系統級綜合健康管理提供了技術支持。需要注意的是,由于復雜系統不同故障類型的故障函數不盡相同,產生的影響程度也有所差異,在進行故障辨識及健康等級判定時,模型的準確性和邊界閾值選取的合理性尤為重要。2 基于EMD算法的故障辨識方法
3 測試驗證

4 結語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21