艦載機飛行控制模擬訓練平臺搭建研究
2020-10-30 03:21:12宋立廷曲志剛吳文海高麗
航空工程進展 2020年5期
關鍵詞:故障
宋立廷,曲志剛,吳文海,高麗
(海軍航空大學青島校區 控制科學與工程系, 青島 266041)
0 引 言
隨著我國海軍“走向深藍”戰略的深化實施,航空母艦作為海軍走向遠海大洋的首要利器,重要性不言而喻,而艦載機是航空母艦的主要攻防武器,其戰斗力的發揮效果直接影響了航空母艦的作戰效能。因此,對艦載機飛行員及相關專業技術人員的培養和訓練十分重要,尤其是相關院校,若能充分發揮教學作用、提升訓練品質,培養出優秀的艦載機飛行員和裝備維護保障人員,必將對未來我國航母形成實質戰斗力打下堅實基礎[1]。為了提高飛行員和保障人員的訓練質量、加快培養進程、保證艦載機安全起降和發揮戰斗力,亟需搭建高水平艦載機飛行控制模擬訓練平臺[2-3]。
國外有關飛行模擬器的研究起步較早,例如,T.L.Alfred[4]通過搜索收集信息,介紹了飛行模擬的歷史及飛行模擬器實現飛行員訓練的相關功能;A.S.J.Van Heerden等[5]開發了一種具有俯仰和橫滾兩個自由度的運動平臺驅動系統,可用于本科生的工程培訓;J.L.Bouthillier[6]設計出一種易實現且低成本的三自由度飛行模擬運動平臺,并介紹了該平臺的優缺點和應用情況;Sérgio Ronaldo Barros dos Santos等[7]利用專用微處理器和X-Plane飛行模擬器組成測試平臺,進行了飛機縱向控制系統的設計、仿真和實時實現;G.K.Sagoo等[8]利用西弗吉尼亞大學的飛行模擬器功能,讓飛行員在六自由度的運動飛行模擬器中進行操縱測試,以評估F-15飛機的故障檢測、隔離和識別系統的性能。
近年來,國內對模擬飛行訓練裝置的開發設計也逐漸興起。例如,張沛帆[9]設計了基于VegaPrime視景驅動的某型運輸機飛行模擬訓練器;王志樂等[10]利用HLA分布式仿真技術,基于COM 組件與PLUGIN 設計了分布式交互飛行虛擬仿真訓練平臺,可用于桌面級仿真訓練軟件和中小型飛行訓練器的快速開發;張兵強等[11]基于虛擬仿真技術開發了航空類虛擬仿真實驗平臺,以供飛行學員進行主戰機型的空中模擬飛行操作實驗和教學體驗飛行;鄭嘉銘等[12]基于MATLB和Flight Gear平臺,改進了某型國產飛行訓練裝置。
但已有研究尚缺乏針對艦載機機型的適配建模,而且大多是單純對飛行環節進行仿真模擬,難以適用于機務保障人員的培養和訓練。為此,本文設計搭建一套艦載機飛行控制模擬訓練平臺,闡述該平臺的基本功能與原理,詳細介紹其組成結構以及各個組成裝置的原理及功能,并通過實際應用驗證該平臺的使用優勢。
1 基本功能
艦載機飛行控制模擬訓練平臺具備三大基本功能:實驗教學功能、科學研究功能和為部隊服務的功能。旨在保障技術人才的教學訓練,支撐先進理論的科學研究以及滿足服務部隊的實戰需求;為海軍航空兵部隊飛行控制相關專業的裝備保障服務提供驗證平臺;為海軍機關飛行控制系統、著艦控制系統以及相關專業裝備的研究、論證決策等提供技術支持[13]。
其中,實驗教學功能指理論層面的綜合控制原理教學,以及實際操作層面的模擬駕駛訓練和維護技能訓練:主要提供自動飛行控制原理、電傳控制系統原理、主動控制技術原理、下滑著艦控制原理、自修復飛行控制原理和自動攻擊導引相關原理的教學實驗;還可提供艦載機空中飛行模態的仿真、視景反饋和地面模擬檢測、故障排查的功能。實現空中飛行駕駛和下滑著艦操縱等模擬訓練,以及自動飛行控制系統(包括電傳控制系統)的通電檢查、性能調整、故障模擬與排除等操作技能的訓練[14]。
科學研究功能包括自動飛行控制系統控制律研究、自動著艦控制方法和著艦引導控制律研究、自動飛行控制系統安全性和魯棒性研究、飛行綜合控制技術研究和自動飛行控制系統控制品質研究。本文搭建的訓練平臺可以為上述技術方法的研究提供仿真模擬環境和演示驗證試驗平臺[15]。
為部隊服務功能則包括自動飛行控制系統和著艦引導控制系統的故障模擬排查及性能分析。可以模擬自動飛行控制系統、電傳控制系統和著艦引導控制系統的空中故障狀況并進行故障重現和影響分析,對部隊實際裝備發生的疑難故障進行復現,以便研究分析其成因及解決辦法。
2 基本原理
本文設計搭建的艦載機飛行控制模擬訓練平臺,其實質是一套“人在回路”的艦載機飛行控制半物理仿真系統,不僅具備艦載機飛行仿真模塊,還配置了電傳系統模擬裝置和舵面模擬裝置等模塊,能夠實現艦載機飛行控制系統地面通電、性能調試、故障模擬與排除的課程實踐及電傳控制、著艦引導控制、自修復飛行控制等先進控制技術的實驗教學,適應艦載機飛行員及飛行控制系統相關裝備保障人員崗位任職培養的需求。
訓練平臺的核心功能體現了自動飛行控制系統和電傳控制系統等的基本原理,在飛機飛行控制系統中,是通過舵回路根據飛行控制指令自動驅動飛機操縱面,改變飛機氣動受力,調整飛機運動狀態,達到自動飛行控制的目的。早期的控制回路主要是通過機械操縱進行傳動,存在很多缺點,因此出現了利用反饋控制原理,將飛行器的運動作為受控參數的電子飛行控制系統——電傳操縱系統。典型單通道電傳操縱系統主要由桿位移傳感器、飛行控制計算機、舵機及其作動器、飛機運動狀態傳感器、控制/顯示接口裝置等組成。飛行員的桿操縱信號、飛機運動狀態信號和控制面作動器位置信號全部通過電信號傳遞。電傳操縱系統能夠快速、準確地處理飛控計算機產生的控制面偏轉角指令并以電信號的形式傳送給控制面伺服作動器。控制面伺服作動器根據飛行員的指令信號與相應傳感器測得的飛機運動狀態之間的偏差進行飛行控制,驅動相應的控制面運動并使飛機能夠快速、平穩地跟蹤飛行員的指令。
而在艦載機著艦過程中,因所處環境復雜、要求精度高、操作難度大,僅靠自動飛行控制系統和電傳控制系統難以平穩、快速地實施著艦,故還涉及自動著艦引導技術、甲板運動補償技術、艦尾流抑制技術、自動油門控制系統以及全自動著艦引導技術等[16-17]。
3 組成結構
基于自動飛行控制的基本原理,訓練平臺模擬系統的飛行仿真模塊以飛行員的操縱指令、模擬故障參數和數據采集傳輸模塊所獲取的信息等作為輸入,運用計算機仿真技術、信號通信技術和數據庫管理技術等,依據飛行動力學的理論和數據及飛行控制學原理,使用實時的4階龍格-庫塔法解算飛機的運動狀態和運動軌跡,通過電傳控制系統模擬裝置傳遞控制信號,以視景顯示模塊、虛擬儀表模塊以及舵面模擬裝置等作為模擬數據輸出,實現對現實飛行環境的模擬仿真,既能實時反饋解算飛行運動參數又能同步驅動舵面模擬裝置產生相應的舵面偏轉,以供學員直觀地感受、學習并且進行實際操縱訓練。其簡單的結構原理如圖1所示。

圖1 艦載機飛行仿真模塊結構圖
在進行著艦過程仿真時,需由艦面運動引導仿真模塊來仿真艦船的運動和航母甲板的運動,由著艦環境仿真模塊來模擬艦尾流的信息,由精密著艦引導雷達系統產生著艦距離和偏差并且規劃期望著艦軌跡。基于著艦環境信息和著艦引導律,由自動飛行控制系統和自動油門控制系統所組成的綜合控制系統根據預設的自動著艦控制律輸出控制信號,在與人工操縱信號融合后,經由電傳控制系統控制舵面和發動機,保證艦載機下滑時的迎角和速度恒定并能沿著期望的下滑軌跡進近著艦。自動著艦控制系統的原理如圖2所示[18-19]。
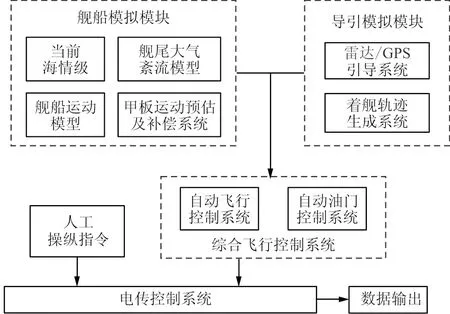
圖2 自動著艦控制系統原理圖
甲板運動參數、艦尾流模型、環境模型參數以及著艦引導參數均由數據采集傳輸模塊收集,通過數據傳輸單元輸送給數據庫管理系統,同時還包括飛行狀態參數、駕駛操縱參數、控制設置參數等。數據采集傳輸模塊結構如圖3所示。

圖3 數據采集傳輸模塊結構圖
訓練平臺的硬件架構由艦載機飛行控制半物理飛行仿真系統、地面檢測設備模擬裝置、交聯信號模擬器、控制與故障設置臺等組成,各組成部分結構關系如圖4所示。
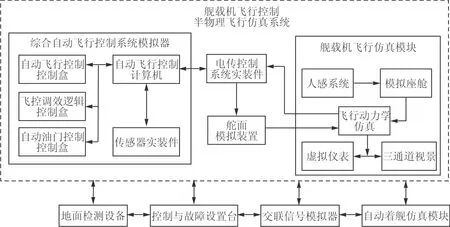
圖4 艦載機飛行控制模擬訓練平臺原理結構圖
平臺實際整體布局如圖5所示,其中飛行控制半物理飛行仿真系統是仿真訓練和模擬操作的主體,地面檢測設備模擬裝置用于進行艦載機飛行控制系統地面通電、性能調試操作的教學訓練,交聯信號模擬器用于各類模擬信號的產生和綜合,控制與故障設置臺可以實現實驗項目管理、機型管理和電源控制等任務,還可以人為設置空中或地面故障情況,分析故障影響并進行應對操作的訓練[20]。

圖5 艦載機飛行控制模擬訓練平臺整體布局圖
3.1 艦載機飛行仿真系統
艦載機飛行仿真系統包括艦載機飛行仿真模塊(三通道投影視景顯示、模擬座艙、人感系統模擬裝置等)、電傳控制系統模擬器、自動飛行控制系統和舵面模擬裝置。
3.1.1 飛行仿真模塊
利用艦載機飛行動力學數據和計算機仿真技術,采用半物理實時仿真,實現模擬飛行操縱,飛行仿真系統具有逼真的座艙顯示和桿操縱系統。飛行模擬器配有模擬座艙,座艙儀表顯示功能采用虛擬儀表實現,駕駛桿、油門桿和腳蹬配置人感模擬系統,操控特性與真實艦載機基本一致,采用三通道視景顯示系統實現艦載機飛行或著艦過程的場景畫面顯示,艦載機飛行仿真裝置硬件組成如圖6所示。

圖6 艦載機飛行仿真裝置硬件組成示意圖
模擬座艙用來實現飛控系統的操控和檢測功能以及飛行或檢測狀態信息顯示,由駕駛系統模擬裝置、人感模擬系統、虛擬儀表顯示屏組成。
駕駛系統模擬裝置殼體采用復合材料模具成型,外觀精致牢固,移動方便。座椅符合人體學設計,座椅安裝平臺可前后移動。駕駛系統模擬裝置和人感模擬系統可以實現模擬桿力和配平功能,油門桿系統采用懸掛式雙發油門,操控特性與實戰飛機基本一致。
仿真計算機和數據庫管理計算機能夠滿足飛行仿真的實時性、數據管理容量的要求。模擬座艙還包括飛行控制系統所需的控制顯示裝置,模擬座艙系統結構如圖7所示。

圖7 模擬座艙系統結構示意圖
3.1.2 自動飛行控制系統模擬器
艦載機自動飛行控制系統用實裝試驗件實現半物理實時仿真。自動飛行控制系統相關控制部件的模擬裝置采用與真實裝備一致的輸入/輸出信號,滿足自動飛行控制系統的實驗需求,可實現艦載機自動飛行控制系統模態模擬、控制律分析、性能分析和故障模擬,自動飛行控制系統模擬器的硬件結構如圖8所示,包括自動飛行控制計算機(或模擬裝置)、自動飛行控制盒模擬裝置、飛控調效邏輯控制盒模擬裝置和傳感器模擬裝置。自動飛行控制計算機模擬裝置接收來自傳感器模擬裝置、電傳控制系統模擬器以及交聯信號模擬器的信息,根據操作員通過自動飛行控制盒、地面檢測設備和控制與故障設置臺等給定的操縱量和輸入指令,自動飛行控制計算機模擬裝置進行模態轉換邏輯和控制律解算,形成控制信號,經數據通信總線傳遞給電傳控制系統模擬裝置,控制舵面模擬裝置運動,并完成對姿態和航跡的控制。
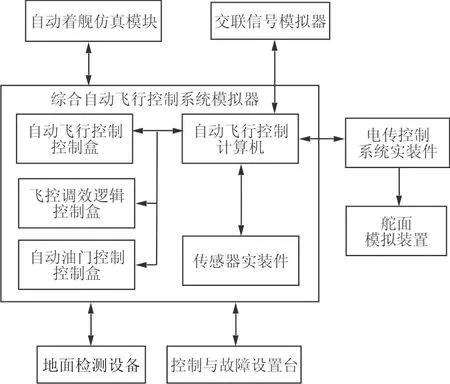
圖8 自動飛行控制系統模擬器硬件結構圖
在進行著艦過程模擬時,自動著艦仿真模塊可以采用進場動力補償(APC)技術、甲板運動補償與預估技術、著艦引導跟蹤雷達噪聲抑制技術、艦尾氣流擾動抑制技術以及艦載機復飛決策技術等對艦載機自動著艦控制系統進行模擬,完成對艦載機著艦導引控制、綜合飛行/推進控制、進場/著艦飛行管理控制理論的實驗研究。
3.1.3 舵面模擬裝置
在實際飛行中,飛行控制系統通過控制飛機的舵面來調整飛行狀態,在地面通電檢查、故障分析和控制律重構等實驗中需直接觀察舵面偏轉情況并要求能夠設置舵面卡死故障,因此舵面模擬裝置應能夠模擬水平尾翼、垂直尾翼、前翼、襟副翼的偏轉,在駕駛桿進行操縱時,使學員能夠直觀地觀察舵面狀態的變化或研究舵面故障情況。舵面模擬裝置由電傳控制系統模擬器驅動,其結構如圖9所示。

圖9 舵面模擬裝置結構圖
3.2 交聯信號模擬器
交聯信號模擬器能夠模擬電傳控制系統、自動飛行控制系統和著艦引導系統所需的各種交聯信號,包括慣導系統、大氣數據系統、任務系統等產生的飛行狀態數據以及控制偏差信號。利用A/D轉換、總線數據生成技術,完成電傳控制系統與自動飛行控制系統的信號激勵[21]。
3.3 控制和故障設置臺
利用控制和故障設置臺完成訓練平臺各模塊的管理、控制以及故障模態設置,控制臺實現實驗項目管理、機型管理和電源控制等任務,分為電源控制單元和教員實驗控制單元兩部分。電源控制單元主要完成實驗系統的主電源控制、交流電源相序的測量、二次電源的產生和測量、電源故障的告警等任務。教員實驗控制單元主要完成實驗系統任務控制,對各類數據的傳輸、分析和管理,實驗和訓練效果的評估等任務[22]。
4 實現與應用
依照所設計的飛行控制模擬訓練平臺,編寫飛行駕駛模擬和艦基起降操縱模擬程序,并搭建、連接各硬件設備。平臺完整建成后的主體如圖10所示,圖中①為三通道投影視景顯示屏;②為綜合模擬座艙;③為舵面模擬裝置;④為實驗中控機柜。

圖10 飛行控制模擬訓練平臺實物圖
本文設計的模擬訓練平臺實際使用過程中的實時仿真場景如圖11所示,其可作為艦載機飛行員進行著艦操縱訓練的模擬器,其中由艦載機飛行仿真系統模擬飛機駕駛視景,系統中的航空母艦模擬場景如圖12所示;此外還可以用于控制律設計的半物理仿真驗證,例如,試驗艦載機著艦魯棒控制的實際仿真效果如圖13所示。

圖11 模擬訓練平臺實時仿真場景圖

圖12 航空母艦模擬場景

圖13 艦載機著艦魯棒控制仿真效果圖
平臺建成后,現已應用于飛行控制及相關專業學員的《飛行控制原理》《電傳控制系統》等課程的實驗教學和模擬實操訓練,每門課程根據培養目的安排2~3次實驗課,使課堂教學更具開放性、趣味性,優化了學員對專業知識的理性認識和直觀感受。同時也為研究生學員進行控制律原理設計提供了仿真驗證平臺,改善了培養條件,豐富了訓練手段,提高了教學效果,受到廣大師生的一致好評。
5 結束語
本文設計搭建的艦載機飛行控制系統模擬訓練平臺是解決艦載機飛行員及相關技術保障人員匱乏這一問題的有效手段,符合我國海軍當前的發展需求。使用該平臺進行飛行控制專業相關原理的教學及模擬操作訓練,不僅能加快飛行員及相關專業技術人員的培養進度、提升訓練質量,還可以為新型戰機飛行控制系統的改進性研究、艦載機著艦引導技術和其他新技術、新理論的研究提供實驗平臺。但該訓練平臺的功能尚不完善,仍有很多需要改進的問題,例如未來可引入虛擬現實(VR)技術,通過給模擬座艙加配機械臂來實現4D效果的模擬飛行體驗,為學員模擬操作訓練提供更逼真的環境等。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
