Phantom 4 Pro無人機傾斜攝影測量技術在礦山地質勘探中的應用
2020-10-30 15:16:00王金玲王愛鋒
世界有色金屬 2020年16期
王金玲,王愛鋒
(楊凌繪秦測繪有限責任公司,陜西 咸陽 712100)
近幾年,無人機技術受到各行各業的關注,無人機傾斜攝影測量技術逐漸發展起來,與傳統垂直攝影測量方法相比,傾斜攝影測量多了4個傾斜拍攝角度,在實際應用中能夠獲得更加豐富的側面紋理信息用于實景建模,突破了傳統攝影測量技術的局限性[1]。
礦山開發是促進社會經濟發展的重要環節,隨著礦產資源的利用程度越來越高,礦山環境普遍受到嚴重破壞,礦山土壤質量變低,水土流失情況比較嚴重[2]。為了改善環境,保證地區的安全,對礦山地質的勘察十分必要,摸清礦山地質的特征,能夠及時避免在地質勘察中可能發生的危險,為后續的礦山開發提供前提和保障。近幾年,越來越多的礦山地質勘察使用了無人機技術,利用無人機技術節省了大量的人力和財力,開展此項目可以大大提高礦山地質的勘察效率,保證礦山資源安全開發。但是,目前無人機傾斜攝影測量技術使用的設備大多是工業級無人機飛行器,設備價格昂貴,受損成本太大,同時受到測區環境的影響,在小范圍的區域或干擾較大的復雜環境下,應用度不是很高。因此,提出Phantom 4 Pro無人機傾斜攝影測量技術在礦山地質勘察中的應用,這種消費級無人機成本低廉,具有較強的抗干擾性能,能夠盡可能地解決上述中存在的問題。
1 Phantom 4 Pro無人機傾斜攝影測量技術在礦山地質勘探中的應用
1.1 優化航攝方案
礦山地區具有一定的危險性,在航飛之前,需要制定科學合理的航攝方案。
在使用Phantom 4 Pro無人機執行航攝任務之前,確定無人機的飛行參數,在飛行參數的確定的情況下,選擇飛行方式和攝影方式,同時對工作量進行預測,其中最重要的是航線設計,理論上,航攝過程中需要采用平行航線折返拍攝,但實際上,航攝的設計需要根據實際需求,結合測區地形的變化和地物的復雜程度而變化,因此在設計航線前,對測區進行分區處理。
當整體待測區域的分布特征呈現出不規則,并且測區范圍比較小時,采用外接矩形方式,將待測區域包含在矩形內。
當測區面積比較大時,為了便于攝影,將測區分為多個小分區,敷設航線在每個分區外接矩形上。對于小分區的范圍,則以單次航線無人機電池電量的支持范圍為主。
在以上設置的同時,對于航攝分區的規定,在分區時需要注意分區界線的位置是否一致。對于傾斜攝影測量,具體的拍攝方式需要根據待測區域的地物特征來選擇,在礦區內,比較常見的地物有三種,分別是點狀、線狀和面狀地物。對于點狀地物,主要采集其周圍的立面信息,采取單鏡頭垂直對地物面環繞飛行拍攝,采集立面信息,飛行過程中控制物距調整飛行半徑時,主要以地物中軸線為中心,從地物底部環繞到頂部完成攝影;對于線狀地物,采用三鏡頭折線飛行方式,分別從左、右和垂直三個鏡頭分別獲取待測區域地物的影像信息,包括垂直影像信息和傾斜影像信息;對于面狀地物,不需要采集其立面信息,主要采集其頂面影像即可,攝像方式直接采用豎直攝影,保證航向重疊和旁向重疊即可。
按照以上對待測礦區的航攝方案的設計,獲取礦區整體的遙感數據,并對數據進行后期處理,使其符合后續礦山地質勘察中對遙感數據的實際需求。
1.2 獲取無人機遙感數據及后期處理
基于上述中經過優化的航攝方案,針對礦山地質勘察的實際需求,根據用戶提供的成圖要求,制定具體的飛行任務技術方案,在進入航飛之前,申請空域飛行許可,收集當地自然地理條件與氣候條件,制定飛行路線,對攝影參數進行準確的計算和設定。
根據航攝方案中對礦山區域的測量需求,設計Phantom 4 Pro無人機飛行航線,通過地面站軟件設計航線以及無人機的飛行參數。
在航線設計中遵守航攝方案中對航線的要求,考慮影響航線設計的各種因素,如地形地物、環境天氣、分辨率和重疊度等。在這些因素中,航線設計主要考慮的因素是分辨率、相幅大小和重疊率。如圖1所示。
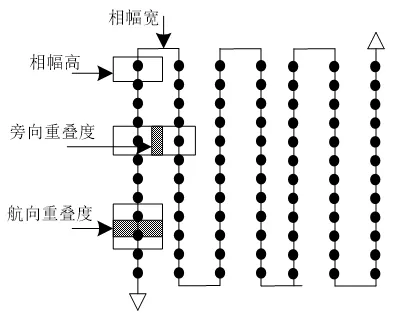
圖1 航線設計參數圖
正常情況下,對于重疊度的設計主要考慮地形起伏對實際重疊度的影響,具體影響如公式1所示。
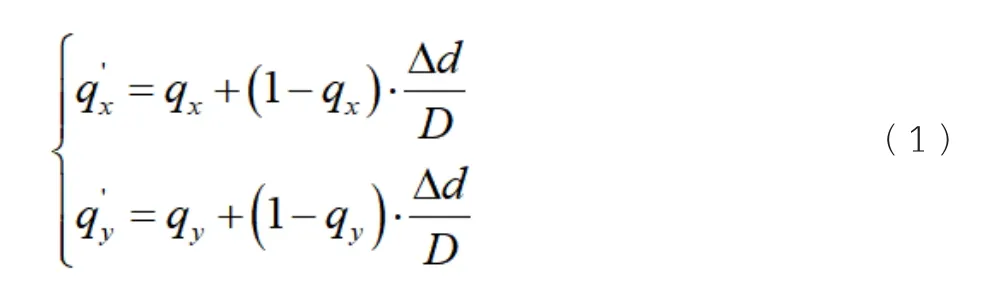
公式中qx和qy分別表示具體的航線重疊度和旁向重疊度值,q'x和q'y分別表示理論值,?d表示整個測區地形的基準面高差之間差異,D表示Phantom 4 Pro無人機飛行的相對高度。在完成航線的設計后,布設量測所需的像控點,按照航帶網對野外的各個控制點進行考慮之后布設,每段航帶網兩端對點間隔的基線數通過公式2計算:
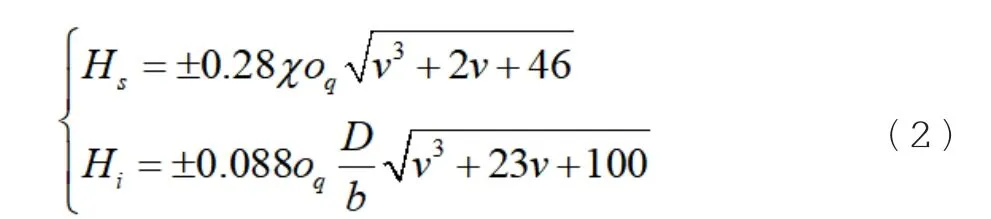
公式中Hs表示加密點的平面中誤差,mm;oq表示視差測量中的單位權重誤差,mm;x表示像片放大成圖倍數;v表示相鄰控制點之間的基線數;Hi表示加密點的高程中誤差,mm;b表示像片基線長度,mm;在完成像控點布設后,調試航拍相機,檢查相機內的存儲空間,調整各項攝像參數,將無人機放飛,采集礦山地質遙感圖像,獲取遙感數據。
一般情況下,采用無人機傾斜攝影測量技術采集的效果比較好的圖像比較困難,成像條件比較復雜,由于室外環境的干擾,獲取的圖像姿態極不穩定,需要對獲取的圖像數據進行后期處理,經過優化照片、構建點云等操作后獲得校正后的正射影像。在后期處理中,主要使用Acute3D軟件對無人機數據進行后期校正處理,得到高精度的正射影像及點云數據,利用這些數據重構出礦山地質模型,便于后續礦山的開發與地質的進一步勘察。
2 實驗研究
在實驗研究中選擇的測區為某市的開放性礦區,在相同的測試環境下,分別應用不同類型的無人機,采用無人機傾斜攝影測量技術獲取礦區相關數據,以數據的精度為衡量標準,對比不同無人機在礦區地質勘察中的應用情況。
在實驗礦區部署多個檢查點,應用不同的無人機獲得的檢查點精度如表1所示。
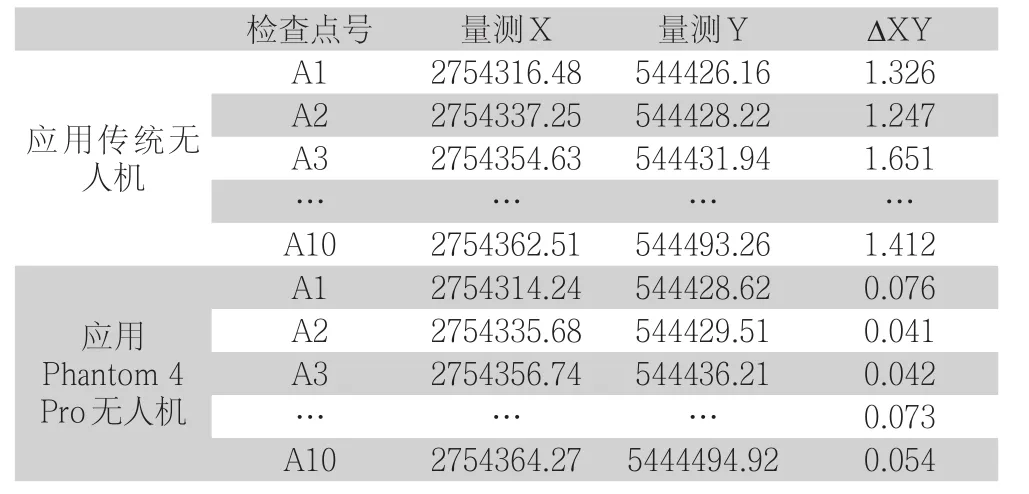
表1 實驗礦區檢查點精度統計表
表中的?XY表示的是點位中誤差,在應用傳統無人機的測量結果中,檢查點的最大點位誤差為1.651,檢查點的最小點位差為1.247,根據實際測量規范中的要求可知,點位中誤差的限差為0.5,以上結果均超過了標準范圍;應用Phantom 4 Pro無人機的測量結果中顯示,檢查點的最大點位誤差為0.076,檢查點的最小點位差為0.041,與實際測量規范中的要求相比,均滿足限差0.5以下的要求。綜上所述,將Phantom 4 Pro無人機傾斜攝影測量技術應用在礦山地質勘察中,其精度水平更能滿足測量需求。
3 結束語
在無人機傾斜攝影測量技術迅速發展的今天,該技術已經擁有了傳統攝影測量技術所沒有的優點,在無人機測量技術日漸成熟的今天,擴展其應用范圍,是一個必要的發展方向,也是該技術逐漸成熟的標志。利用Phantom 4 Pro無人機,采集礦山地質遙感圖像,為后續礦山地質勘察和礦山資源的開發提供幫助。但是研究過程中,未綜合考慮自然因素對影像勻色、勻光處理等問題,對于這些問題,仍值得深入研究。
猜你喜歡
現代礦業(2021年12期)2022-01-17 07:30:32
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21