基于CORS的南寧高層建筑自動化監測系統設計與實現
2020-11-02 02:53:00肖震
農村經濟與科技 2020年11期

【摘要】為解決南寧城市建設中高層建筑物三維形變累積可能引發的安全隱患,基于CORS技術設計了一種高層建筑自動化監測系統平臺,在對監測平臺總體設計、關鍵數據處理技術、成果展示方式進行系統性研究的基礎上,提出的CORS框架下的靜態濾波解算處理方法實現了毫米級的監測精度,并以樓頂型CORS站點作為監測點進行了模擬監測,驗證了系統的技術可行性和監測精度。該系統能夠滿足建筑物高精度變形監測要求,可為城市高層建筑自動化變形監測提供有效幫助。
【關鍵詞】高層建筑;CORS;變形監測;自動化
【中圖分類號】P204
【文獻標識碼】A
1 GNSS及CORS技術背景介紹
隨著社會經濟和城鎮化建設的快速發展,一座座的摩天大樓如雨后春筍般拔地而起,逐漸成為城市經濟繁榮標志性特征。世界高層建筑與都市人居學會在2018年公布的研究報告顯示在2017年建成摩天大樓最多的城市中,南寧以7座超200m、總建成高度超過1600m的摩天大樓數據排在深圳之后,位居世界第二,而在建的天龍財富中心等項目,還在不斷地刷新首府南寧的天際線。然而建筑物在施工建設與運營管理過程中,不可避免會受地下水結構、氣溫變化、材料折損、載荷、風振、日照等因素影響,發生水平位移、垂直升降等形變,特別是高層、超高層建筑,因基礎深、力矩大等特性,更容易產生并累積三維形變,從而引發建筑物傾斜、垮塌等重大安全事故,給人們的生命財產安全帶來嚴重后果。因此,對高層建筑實施全生命周期自動化監測具有十分重要的意義。全方位了解建筑物三維形變狀況不僅可以快速發現建筑安全隱患,及早采取人工干預措施,切實保障高層建筑的使用安全,而且還有助于深入了解建筑物變形誘因、變形機制及發展規律,檢驗和發展建筑設計相關理論、方法,并為之后的反饋設計和方案優化提供詳實科學的數據依據。
CNSS技術的出現與日益發展,以其全天候、高精度、自動化特點,已經成為變形監測領域最先進、最重要的技術方法。再加上GNSS接收機等硬件設備的更新換代和成本持續下降,CNSS技術應用性價比也越來越高。特別是連續運行參考站( CORS)的建設和普及,使得GNSS定位服務方式從以前慢速、事后發展到快速、實時,精度從厘米級、分米級發展到毫米級。CNSS技術逐漸成為高精度變形監測的首選方式。南寧CORS自2008年開始建設,經過多年的持續建設,現在已經形成了包含34座基準站,實現南寧市全域覆蓋服務的測繪基準體系,為全市提供權威、統一的坐標框架,滿足各行業各部門不同精度的測繪地理信息應用需求。南寧CORS系統高精度、高可靠性的實時空間定位服務可為城市高層建筑沉降、傾斜等變形監測提供自動化、智能化解決方案。
2 系統總體設計
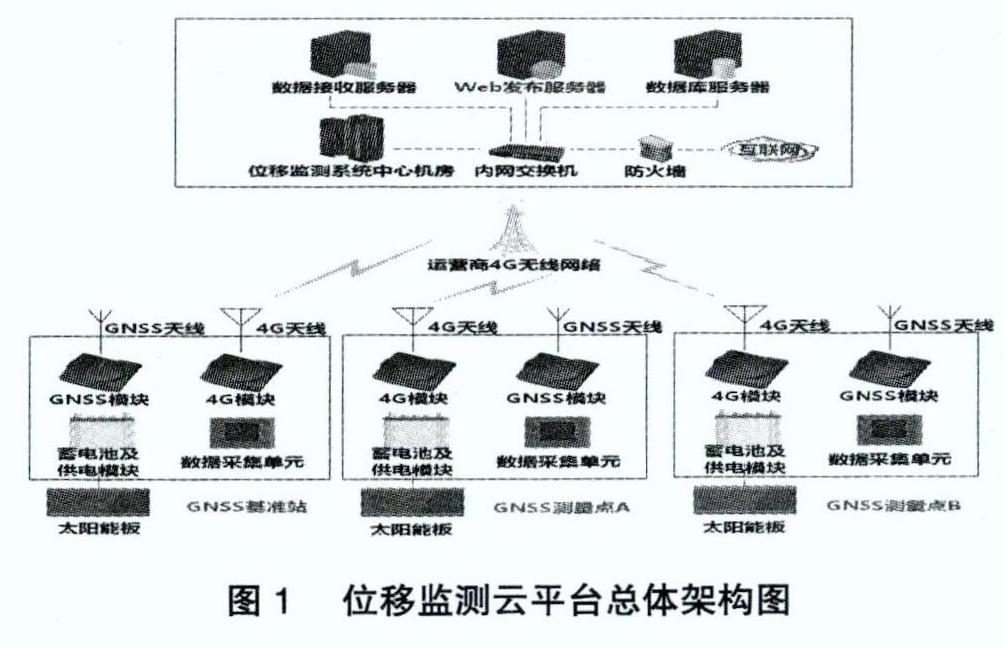
高層建筑自動化監測系統由GNSS位移監測站設備以及位移監測云平臺組成。其中GNSS設備負責監測點數據采集,位移監測云平臺負責監測設備控制、數據處理、以及信息發布。平臺總體架構如圖1所示:
2 技術路線
2.1 數據采集
研制集CNSS、天線、太陽能供電系統、無線網絡通訊、防雷裝置、含蓄電池及充放電控制器的防雨機箱、觀測墩于一體的位移監測站(見圖2),具備便捷安裝、無人值守、全天候觀測特點。利用CNSS收發,4G通信傳輸、嵌入式模塊控制等技術,可在云服務器端實現對監測設備的參數設置、儀器控制以及高精度數據處理,進而實現監測點厘米級、毫米級實時監測。
2.2 數據處理
基于CORS網的高層建筑形變監測數據處理方法需綜合考慮項目精度、成本等多種因素進行選擇。可以采取連續運行基準站與監測目標聯測,以組網解算的方式獲取監測點毫米級精度三維坐標,該方法特點是針對較大區域形變監測,但對觀測設備性能要求高。本文選取基于南寧CORS框架下的靜態濾波解算處理方法,優點是處理速度快、對數據采集設備要求不高,監測精度能達到亞厘米甚至是毫米級別。數據處理流程如下:GNSS靜態數據經數據傳輸和格式轉換后,進入基線解算處理模塊,經實時周跳處理、接收機天線相位中心改正、Kalman濾波參數估計、系統變形參數的自動探測與提取后,輸出最終變形監測成果。
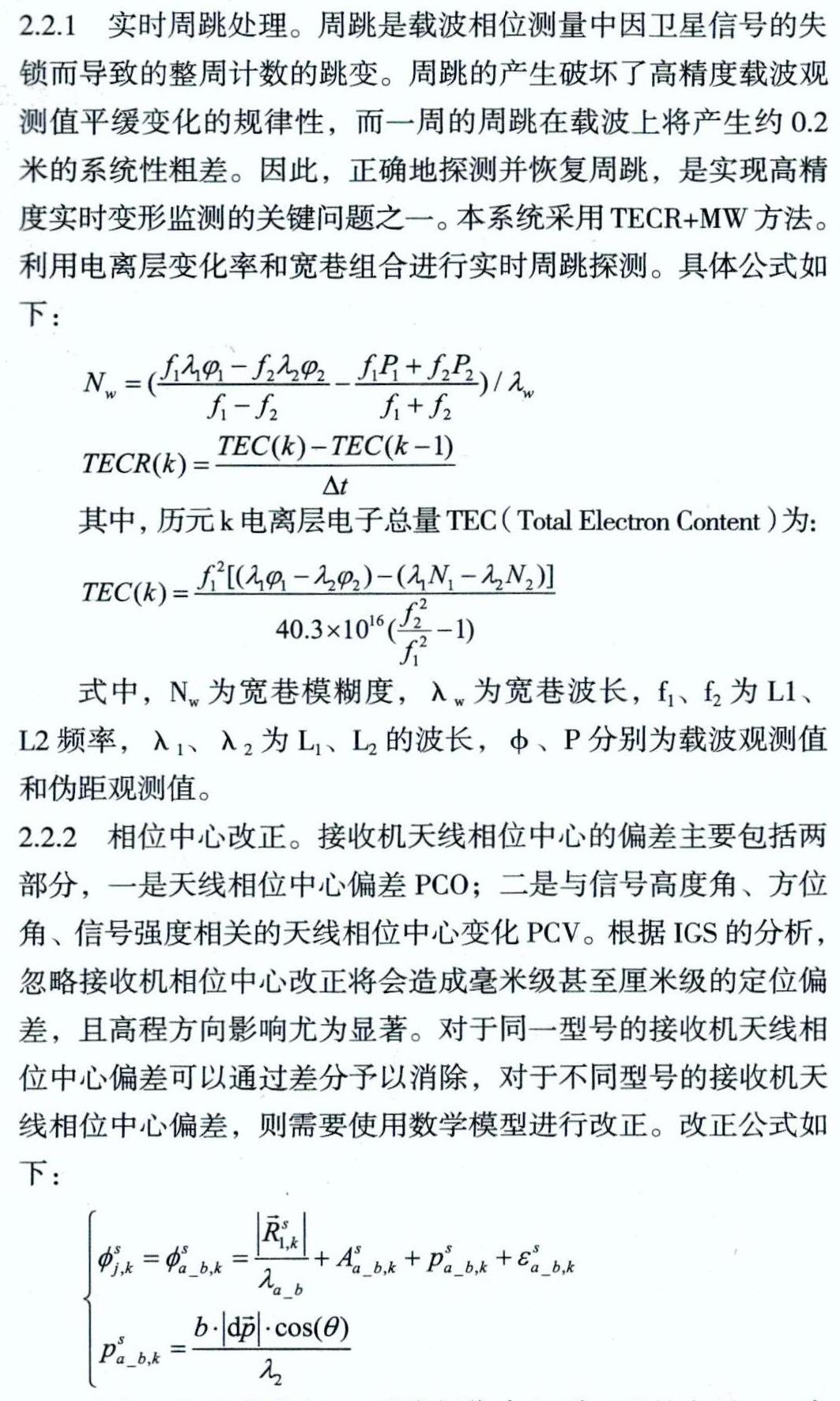
2.2.1實時周跳處理。周跳是載波相位測量中因衛星信號的失鎖而導致的整周計數的跳變。周跳的產生破壞了高精度載波觀測值平緩變化的規律性,而一周的周跳在載波上將產生約0.2米的系統性粗差。因此,正確地探測并恢復周跳,是實現高精度實時變形監測的關鍵問題之一。本系統采用TECR+MW方法。利用電離層變化率和寬巷組合進行實時周跳探測。具體公式如下:
2.2.2相位中心改正。接收機天線相位中心的偏差主要包括兩部分,一是天線相位中心偏差PCO;二是與信號高度角、方位角、信號強度相關的天線相位中心變化PCV。根據IGS的分析,忽略接收機相位中心改正將會造成毫米級甚至厘米級的定位偏差,且高程方向影響尤為顯著。對于同一型號的接收機天線相位中心偏差可以通過差分予以消除,對于不同型號的接收機天線相位中心偏差,則需要使用數學模型進行改正。改正公式如下:
IGS發布的相位偏差改正文件(ICS_08.atx)中獲取。
2.2.3 Kalman濾波參數估計。Kalman濾波一種線性最小方差估計,它引入了狀態空間的概念,利用狀態方程根據前一時刻的狀態估計和當前時刻的觀測值遞推估計新的狀態估值,可以實現從一組有限的,包含噪聲的,對物體位置的觀察序列預測出物體的位置的坐標及速度。對于動態監測數據而言,Kalman濾波參數估計是一種非常有效的數據處理方法。其公式如下:
狀態更新:
2.2.4形變參數的自動探測與提取。高精度形變監測觀測數據,經過Kalman濾波除噪、自動閥值分類以及基于假設檢驗方法的形變位移參數自動探測后,可提取出相應的位移形變特征信息。將其分解為與變形監測目標顯著相關的位移變化、速度等運動狀態參數信息,并作為最終的三維形變監測數據用于高層建筑形態分析、評價和預測。高層建筑變形監測系統的目標是實現對監測建筑物目標點位移、速度等時空運動狀態相關參數的動態監測。為實現這一目標;需要以下四個過程:一是奇異值檢驗,采用基于Kalman濾波殘差等外部信息進行粗差探測與剔除,盡可能的去除噪聲影響,保留監測點運動狀態信息;二是自適應分類,采用基于假設檢驗理論的數據分析方法,設計與高層變形特征相對應的檢驗量,判定某一歷元是否發生形變;三是形變探測,當發現形變后,記錄形變發生時刻以及形變量;四是參數估計,通過Kalman濾波算法將形變監測值轉化為表征高層建筑物形態的時空運動狀態參數,包括位移參數、速度參數等,實現最終變形監測結果的輸出。
2.3 數據發布
位移監測云平臺采取基于REST風格的Web服務發布技術實現監測成果數據發布,主要包括監測目標實時三維位移形變圖、形變速率圖、3D時序圖、形變數據表等。
3 案例測試
本文選取南寧市CORS網中馬山站2019年12月1日- 15日的觀測數據進行了案例測試。馬山站位于縣自然資源局辦公大樓樓頂,采用徠卡CRIO型GNSS接收機,AR25型扼流圈天線,可實時獲取三星系統觀測數據。經靜態濾波處理后,監測結果如圖3所示,數據成果表明監測期內站點坐標在東西方向(E)、南北方向(N)有Smm左右的位置偏移,而在高程方向(U)比較穩定,沒有顯著坐標變化。
4 結語
本文對基于CORS的高層建筑自動化變形監測平臺總體設計、關鍵數據處理技術、成果展示方式進行了系統性研究,提出的CORS框架下的靜態濾波解算處理方法實現了毫米級的監測精度,并在馬山站案例測試中得到有效驗證。隨著GNSS技術的進一步發展,CORS基準站網將在更多城市得到推廣應用,基于CORS網的變形監測系統將在高層建筑監測領域擁有更加廣闊的應用前景。
[參考文獻]
[1]譚智,基于CORS的高層建筑物三維形變監測關鍵技術研究[J].城市勘測,2015 (2):85-87.
[2]姜衛平,衛星導航定位基準站網的發展現狀、機遇與挑戰[J].測繪學報,2017(10):181-190.
[3]李運健,周國奎,廖超明.基于廣西CORS的形變監測技術探討[J].南方國土資源,2014 (6):41-43.
[4]張順.CPS非差數據周跳探測方法研究[J].大地測量與地球動力學,2012,32(1):101-104.
[5]魏平新,基于GDCORS的廣東省滑坡災害動態監測系統[J].測繪通報.2012(3):9-12+19.
[作者簡介]肖震(1987-),男,廣西南寧人,中級工程師,從事GNSS數據處理以及CORS運維管理工作。
猜你喜歡
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 14:02:59
中國科技博覽(2016年19期)2016-10-19 13:54:42
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 09:03:36
中國科技博覽(2016年18期)2016-10-19 08:49:55
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
科學與財富(2016年28期)2016-10-14 18:49:07
科技視界(2016年20期)2016-09-29 14:13:02