圖書館座位智能借還書系統研究?
2020-11-04 10:47:22馮銀花
圖書館學刊 2020年10期
馮銀花
(南京信息工程大學圖書館,江蘇 南京210044)
隨著計算機、物聯網技術的發展,圖書館智能化建設如火如荼地進行,圖書館界對于人工智能的研究主要集中在圖書館的智能服務方面[1],如智能咨詢機器人、智能座位預約、智能盤點機器人、RFID 智能書架等。關于圖書館書庫智能盤點、智能書架、智能借還等方面的研究主要集中于RFID技術,如電子科技大學申曉亮[2]利用超高頻RFID技術研究圖書自助借還系統的軟硬件架構,開發應用程序實現了圖書的自助流通管理;武漢科技大學王光輝[3]在圖書館管理中運用RFID 技術,設計了自助借還系統、圖書整架系統和智能門禁系統。RFID技術通過在圖書中粘貼電子標簽進行圖書通訊,以實現快速館藏清點、讀者自助借還、安全防盜、快速準確的數據庫檢查和更新功能等,可提高館員的工作效率,加強圖書藏、閱、借一體化的功能,增加圖書館的安全性、準確性、可靠性和擴展性。但RFID電子標簽與磁條比成本高,實際應用中RFID 信道存在較高的誤碼率[2],圖書標簽易出現串讀漏讀;圖書自助定位不夠準確,易引起圖書錯架亂架[4],需要管理員協助解決問題。目前圖書館人才隊伍建設處于發展初期,無法完全配合RFID技術解決問題。基于此,筆者設計了圖書館座位智能借還書系統,該系統不涉及RFID 技術,而是由機器人與傳輸帶協助實現讀者在座位上借還書,即圖書通過機器人在書庫自動存取、通過傳輸帶在書庫與座位之間流通。讀者在閱覽室借還書無需離開座位,獲取紙質圖書如同網絡資源一樣便捷,節約了時間,提高了圖書館紙質館藏借閱率。
1 座位智能借還書系統的可行性分析
1.1 圖書智能出入庫
2018 年京東物流“亞洲一號”無人倉正式亮相[5],掀起物流業人工智能的高潮,無人倉上千個機器人相互配合完成商品的出入庫與裝載,由小型機器人將商品分揀至相應的轉運包裹,中型機器人對轉運包裹進行再次分配與打包,大型機器人將最終的包裹放入傳輸帶運至庫房外的運輸車上,無人倉效率是傳統倉庫的10 倍。假設圖書館書庫是物流倉庫,可實現機器人管理圖書出入庫,實踐中圖書與商品相比體積小、重量輕、抗撞擊性強,圖書的出入庫管理較商品容易許多,因此在技術上圖書智能出入庫管理是完全可行的。
1.2 圖書智能傳輸
無人餐廳[6]采用自動傳菜系統實現菜品在廚房出菜口與餐桌之間的傳輸,消費者入座后進行手機掃碼點餐,廚師將其菜品做好后放入傳輸帶玻璃容器從廚房傳輸至餐桌。玻璃容器設置傳感模塊、驅動模塊、信號接收模塊等,當容器感應到餐桌二維碼立刻停止運輸,消費者將菜品取走,自動傳菜系統節省餐廳人力,節約消費者等待時間。圖書館讀者座位與書庫出口之間也可運用類似傳輸原理運書,圖書比菜品更易于運輸,無人餐廳成熟的傳菜系統為圖書智能傳輸提供實踐基礎。
2 座位智能借還書模塊介紹
2.1 智能控制系統
智能控制系統提供了一個信息集成、反饋、分析為一體的平臺[7],本控制系統主要完成館藏圖書存取與傳輸帶運書兩部分任務。書庫圖書存取由控制系統指揮機器人完成,傳輸帶運書由自啟動電機帶動滾輪轉動完成,兩個過程都需要監控設備(C-MOS攝像頭、激光掃描儀)協助完成,攝像頭采集傳輸帶運行實況,激光掃描儀采集圖書運輸軌跡,如圖1所示。
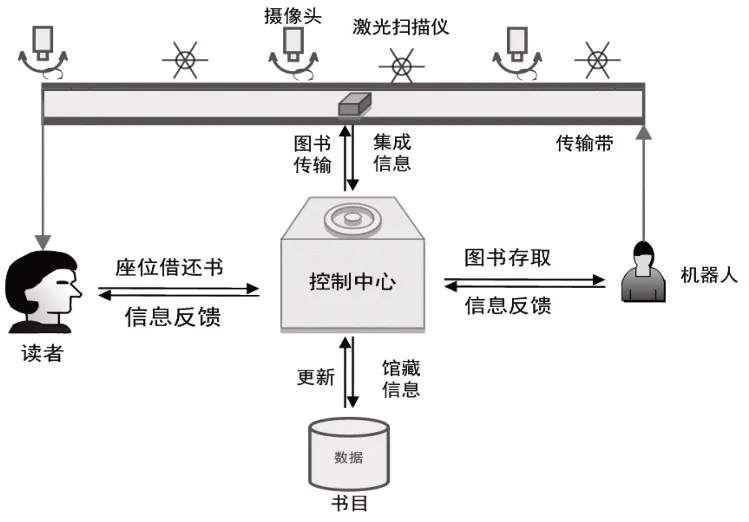
圖1 智能控制系統整體框架
近年來機器視覺技術被廣泛運用于生產流水線,本系統利用機器視覺完成傳輸系統實況監測與問題報警。如圖1 所示,傳輸帶安裝了多個CMOS 攝像頭采集圖片,圖片上傳控制系統進行分析,它是智能控制系統的“眼”。智能控制系統分析圖片預警流程如圖2所示,如果攝像頭拍攝單張圖片中圖書數量>5,控制中心將標紅該條傳輸線,后續路徑規劃會避讓該線路;圖片中傳輸帶與樣本模型圖片差異若大于30%(如傳輸帶滾輪變形、擋板掀倒等),系統傳輸線路圖中該支線將會閃動并報警,運維人員到現場查看實況;攝像頭拍攝圖片中若出現除圖書以外的異物(如人為將其他物體帶入傳輸帶),控制系統將啟動樓層傳輸帶報警系統,樓層巡視人員到現場查看情況。
傳輸帶上激光掃描儀實時掃描傳輸帶上運輸的書盒,將掃描結果傳給智能控制系統。運輸途中圖書與書盒二維碼進行綁定,可獲得圖書實時位置。系統根據圖書規劃路徑判斷是否需要轉向、終止傳輸,需要選擇“是”,啟動電動裝置改變圖書傳輸方向,不需要選擇“否”,圖書繼續傳輸,過程如圖3所示。
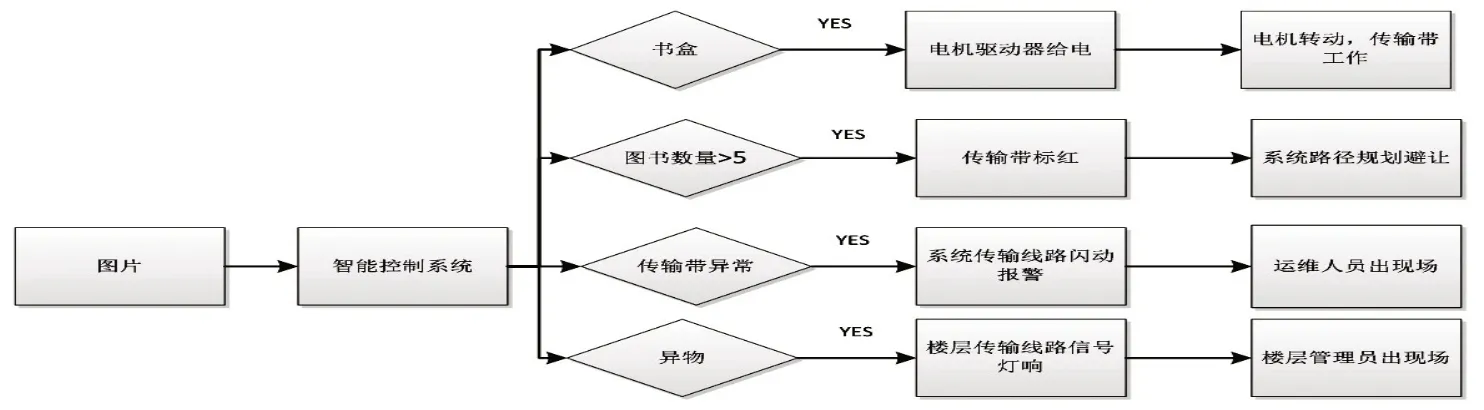
圖2 圖像分析
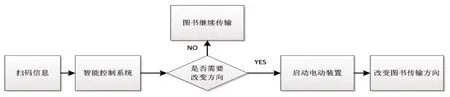
圖3 掃碼識別分析
2.2 座位智能借還書流程
即讀者通過手機掃描座位二維碼將借還書請求發送至控制系統,如圖4 所示,借書時控制系統會調用書目數據庫以獲取圖書館藏信息(可借復本、館藏地址),當可借復本大于0 時,控制系統接受借書請求。具體而言,首先系統將圖書、讀者、座位三者信息綁定,其次指揮機器人到圖書館藏地址取書,機器人取書完畢后將書放入書盒運輸,最后由傳輸帶將圖書運輸至目標座位。還書情況類似:讀者座位掃碼發送還書請求,控制系統給圖書分配館藏地址,目標地址產生后,讀者將圖書放入傳輸帶上的書盒里,再由傳輸帶運回書庫。入庫前機器人會對圖書進行損壞檢測(重量、封面檢測),檢測通過后機器人將圖書存入目標館藏地址,讀者還書成功;檢測不通過,圖書被機器人放入舊書回收處,系統向讀者發送損壞圖書賠償金額。
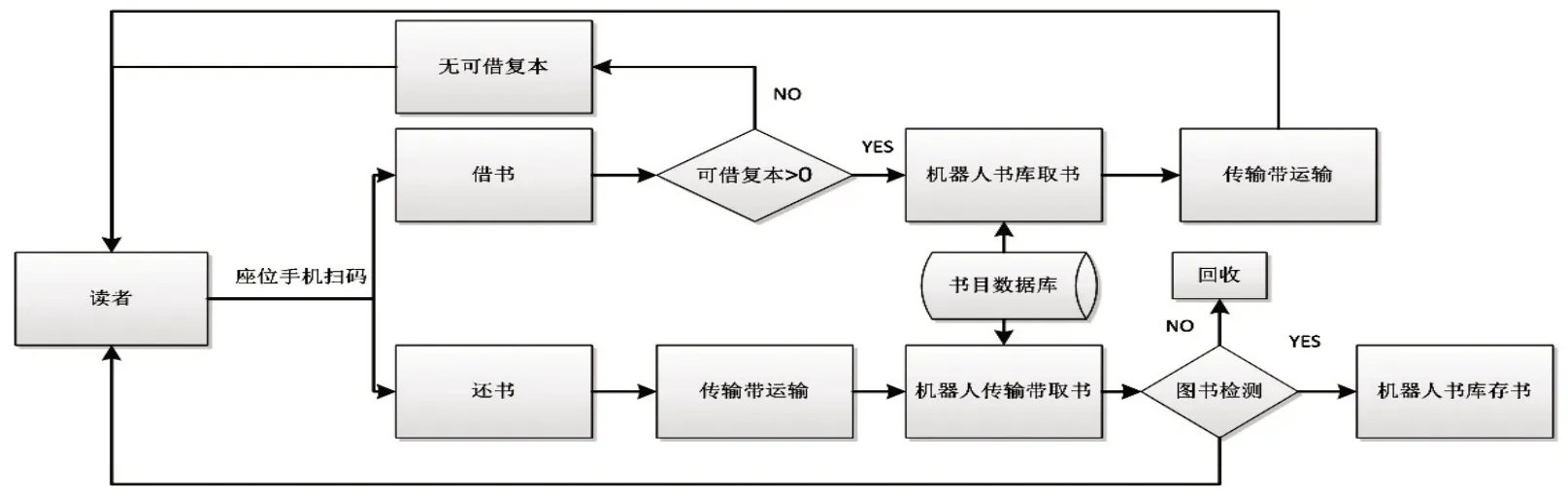
圖4 座位借還書流程
2.3 書庫圖書自動存取
2.3.1 圖書物理地址
本系統借用筆者前期研究成果[8],將書架、書庫分成格子狀,布置如圖5、6所示。書架每層分成大小一致的格子,按照格子的層數(第幾層)以及格數(第幾格)給格子編號;情況類似,按照書架位列書庫的排數與列數給每個書架編號,如第幾排幾列,將書架編號生成二維碼置于書架一側地面,“書架編號+書格編號”為書格中圖書物理地址。例如圖5書架中標黃圖書書格編號為0606,圖6顯示該書架編號為0402,標黃圖書在系統的物理地址為04020606。圖書館藏不按中圖法排架,由控制系統按編碼規則分配地址。
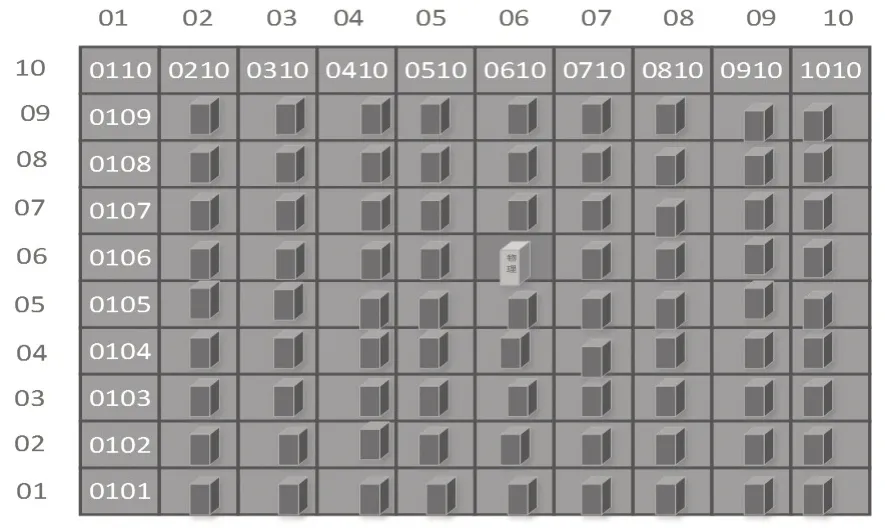
圖5 格子書架
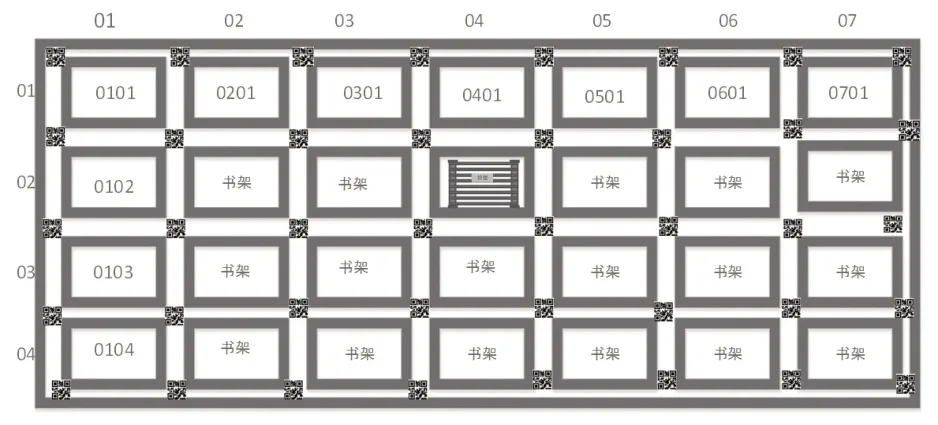
圖6 格子書庫
2.3.2 機器人存取圖書
書庫機器人地面移動方式為90°、180°直轉、原地旋轉,垂直高度自動舉升,機器人激光掃描儀實現二維碼導航,激光障礙傳感器與機械防撞裝置給機器人提供安全防護[9]。當控制系統向機器人發送存取書指令,機器人利用激光掃描儀掃描地面二維碼導航至目的書架,再利用距離測量器測量垂直方向爬行的高度h,相對于編號起點的水平方向距離S。假設圖書所在書格為第n 層第m格,書格固定寬度為a、層高固定為b,當m-1<S/a<m+1,且n-1<h/b<n+1時,機器人停止移動,并利用機械手夾持裝置存取圖書。
2.4 傳輸帶運書
圖書在書庫與座位之間通過傳輸帶流通,智能控制系統借助傳輸帶監控設備、通訊設備、動作設備將圖書準確送達讀者座位。為避免運輸中圖書的損壞,本系統將圖書裝入書盒運輸,每個書盒設置唯一的二維碼,運輸中圖書、座位、書盒三者信息會進行綁定。機器人將書放入書盒,利用機械手夾持裝置[10]將書盒夾入傳輸帶,運輸前控制系統以座位為目的地規劃書盒運輸路徑,根據運輸距離、運輸帶擁堵情況、運輸分岔路口數量,系統規劃最佳路徑與備選路徑,運輸途中若遇運輸線擁堵、報警等突發情況,系統會及時改選備選路徑。
2.4.1 傳輸帶軌道
傳輸帶軌道由獨立轉動的滾輪并排構成(見圖7),傳輸帶滾輪采用空心管,既省材料又減重量,滾輪直徑與轉速根據實際需求設定。每個滾輪由電機帶動,采用直流無刷電機,電壓低、平穩、噪音低。當攝像頭監測到書盒時,控制中心發出弱電信號,驅動器通電啟動電機,滾輪轉動,傳輸帶工作;當傳輸帶無書盒時,控制中心斷電,驅動器斷電,電機停止轉動,傳輸帶停止。
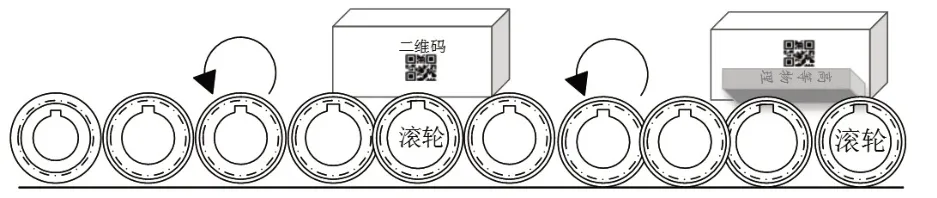
圖7 傳輸帶軌道
2.4.2 傳輸帶圍擋
傳輸帶軌道兩側有寬度一致的長方形薄板圍擋,薄板與底部軌道架通過拉桿相連,左右兩側薄板間相互獨立,座位處圍擋薄板可向外側打開(見圖8)。薄板上安裝C-MOS攝像頭與激光掃描儀,攝像頭為智能控制系統提供視頻監控,實時監測傳輸帶實況;激光掃描儀用于識別書盒二維碼,實時定位運輸中圖書。
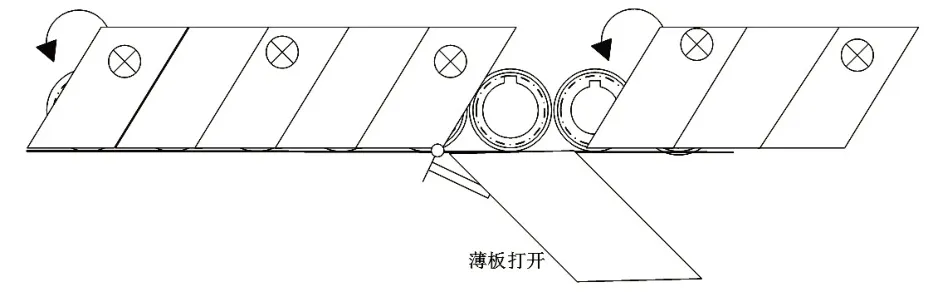
圖8 傳輸帶圍擋
2.4.3 傳輸分岔路口
智能控制系統方向控制設備由電機、推桿以及一系列通訊設備組成,電機與推桿安裝在分岔路口圍擋上,推桿在分岔路口將書盒往規劃路徑方向推進(見圖9)。當書盒運輸至分岔路口時,圍擋上激光掃描儀掃描書盒二維碼,獲得系統規劃的書盒路徑,當規劃路徑顯示需要轉向時,系統向圍擋上電機驅動器發出弱電信號,電機轉動產生轉矩支起推桿,將書盒往規劃方向推進,書盒完成轉向后繼續前進。
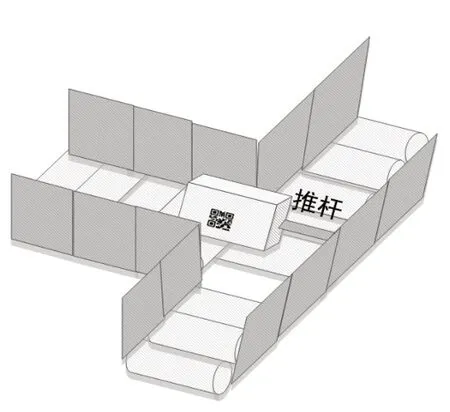
圖9 傳輸帶分岔路口
2.4.4 傳輸終點
控制系統通過激光掃描儀掃碼識別書盒,定位圖書實時位置,當圖書到達目標座位時,控制系統啟動圍擋薄板上的電機,支起薄板底部拉桿,將薄板向外側掀開,架在座位與軌道之間形成滑板,同時軌道另一側薄板上電機啟動支起推桿,將書盒推離軌道,通過滑板滑向座位(見圖10)。讀者在座位上取書,智能控制系統解綁書盒、圖書、座位三者信息,讀者個人管理系統中添加圖書借閱信息。圖書被取,薄板上電機驅動器斷電,電機停止轉動,拉桿收緊,打開的薄板立起,空書盒重回軌道,被傳輸帶運回原地。
若圖書超過10 分鐘未取,拉桿收緊、薄板立起,書盒中圖書被運回書庫。智能控制系統重新給圖書分配空余書格,機器人利用夾持裝置將書盒放回原地,取出圖書并將其放回系統分配的書格。座位還書與圖書超時未取類似,讀者線上還書請求發送后,控制系統將空書盒運至讀者座位處,讀者將圖書放入書盒,傳輸帶再將圖書運回書庫。
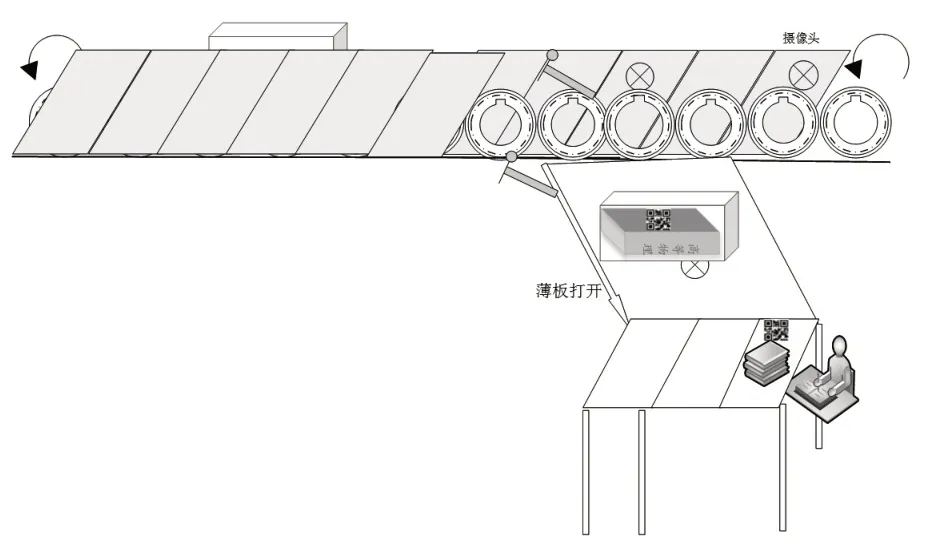
圖10 傳輸帶終點
3 傳輸系統館內布局
3.1 傳輸線路布局
相對于館內其它建筑,密集書庫是一個獨立的建筑結構,館舍建筑呈現“回”字形,樓層傳輸線路俯視圖如圖11 所示,密集書庫坐落于“回”字形中央,在每個樓層有東南西北4 個出口,類似湖心亭結構。機器人穿梭于密集書庫,通過出口與各樓層傳輸帶主線銜接。傳輸帶主線沿“回”字形內側圍成一圈,傳輸主線分出許多支線,從主線往外延伸,繞一圈再回到主線,使傳輸帶形成一個閉環,這樣有利于圖書循環流通。
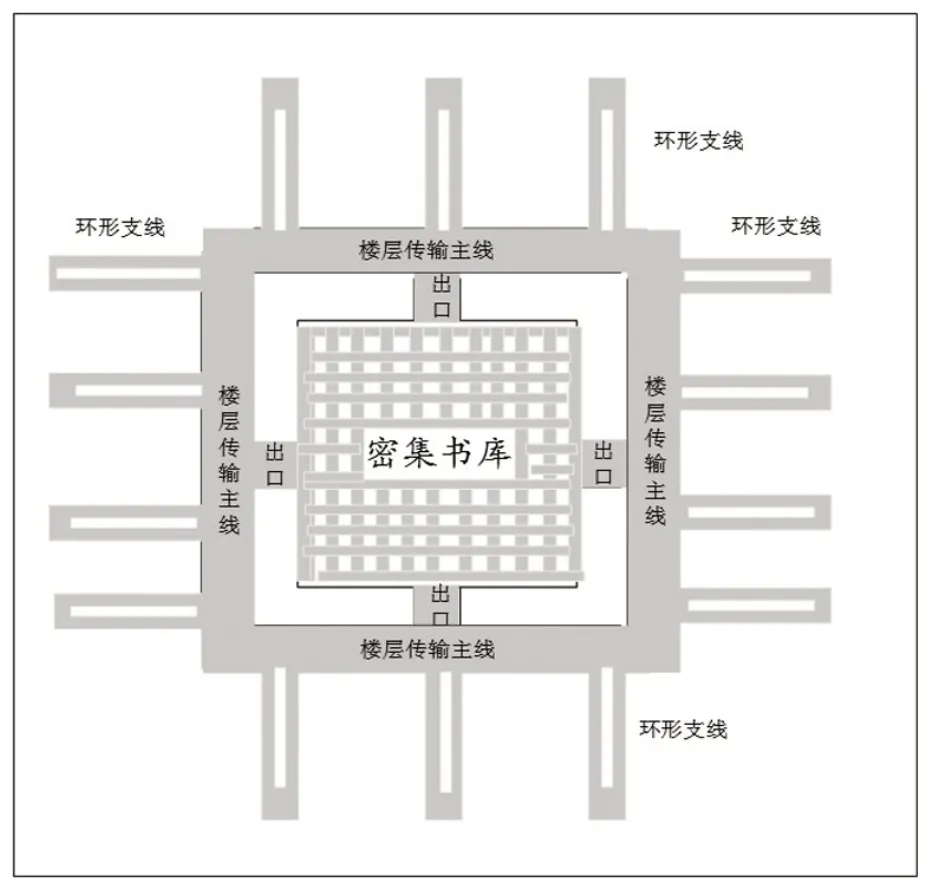
圖11 樓層傳
3.2 座位布局
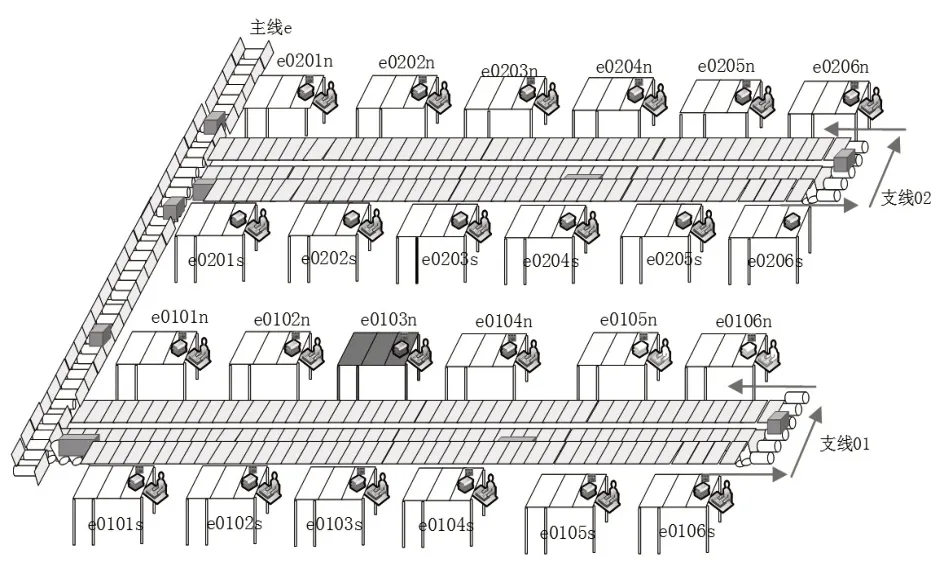
圖12 座位布局示意
4 傳輸管理系統
4.1 座位管理
座位管理主要功能是對圖書館座位資源后臺數據庫的管理與座位資源的信息管理。座位資源后臺數據庫管理主要負責后臺所有數據的修改和維護,包括讀者座位權限修改、指定管理員等,該模塊由超級管理員維護。座位資源信息管理主要負責閱覽室座位信息的查詢、增加和刪除等,維護座位資源的更新,該模塊由管理員完成[11]。
4.2 讀者管理
讀者管理包括讀者個人信息的管理與讀者借閱信息的管理,讀者個人信息管理由用戶與管理員共同完成[11],個人密碼、個人證件照片、出生年月、籍貫、學號、專業、聯系方式等信息由個人完善,管理員負責個人信息的審核與維護,保證讀者信息有效。讀者借閱信息管理主要由管理員完成,負責讀者借閱信息分析,包括讀者座位借還書信息與違約信息。系統統計讀者借還書信息用于分析讀者閱讀興趣,主動向讀者推送新書。對于座位借還書超時違約行為,系統規定:讀者座位借書超時未取發生1次,推送警告消息;發生2次,禁止座位借還書一個月;3次以上暫停座位借還書權限,讀者本人向圖書館遞交情況說明,并在館內承擔一定義務勞動,如修補損壞圖書、整理書桌、打掃地面等才能恢復座位借還書權限。
4.3 圖書管理
圖書管理是典型的信息管理系統,主要包括后臺的數據庫建設和維護以及前臺應用程序的設計,對于前者,要求數據格式統一、多元,安全性、可靠性高;對于后者,要求應用程序功能完備,操作簡單實用[12]。
后臺數據庫是一個實體,它能夠合理保管數據內容,按照一定的結構集中應用系統的數據,使之更便于統一管理[7]。本系統數據實體包括圖書題名、編著、出版發行項、中圖分類號、書刊狀態、封面、出版年份、ISBN 及定價、物理地址等。為盡可能體現實體特征,加入了詳細的關鍵章節、提要文摘附注、導語、載體形態項等信息(見圖13)。
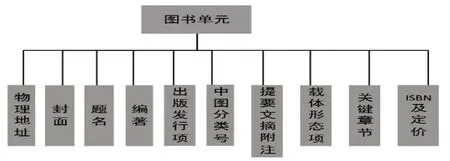
圖13 圖書信息
圖書借還應用程序界面如圖14、15所示,圖書題名、編著、出版發行項、中圖分類號等均可作為檢索項,如選擇檢索項為“題名”,輸入“人工智能”,檢索出所有題名包含“人工智能”的圖書,圖書下方有編著、出版社、索書號、條碼號、館藏復本、可借復本等,點擊藍色字樣“提要文摘附注”,鏈接更詳細的文字介紹。讀者座位掃碼后點擊圖書右側紅色按鈕,向系統發送圖書借閱請求。信息智能控制系統接收請求后調用書目數據庫,若館藏可借復本數量大于0,將讀者信息、圖書信息、座位信息綁定,調用書庫機器人取書。還書情況類似,讀者座位掃碼后點擊“我的圖書館”,查看借閱歷史欄圖書列表,點擊圖書右側“還書”按鈕,向系統發送還書請求,控制系統接收請求,給圖書分配空余書格,運空書盒至座位,將圖書運回書庫,指揮機器人將圖書存入分配的書格。
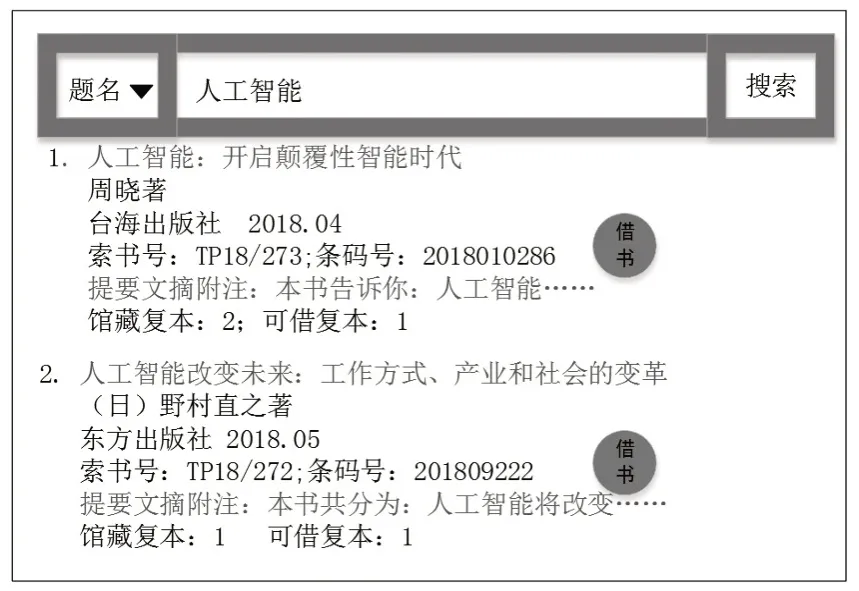
圖14 借書
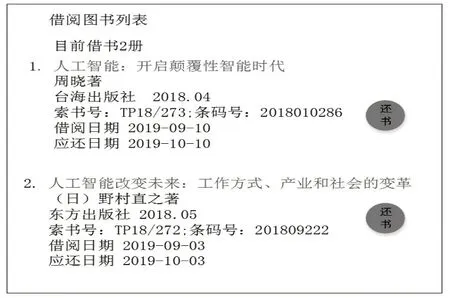
圖15 還書
5 總結
圖書館座位智能借還書系統實現了一站式服務,增強了圖書館智慧服務的體驗效果,可以提高讀者借還書效率,增加圖書借閱量,開拓了圖書館智慧服務的新領域。與RFID技術相比,本系統具有以下優勢:RFID 技術是基于圖書電子標簽與RFID 閱讀器通訊[13]完成圖書清點等工作,RFID 技術通訊系統對圖書本身有依賴,實際運行中需要不斷檢測與維護圖書電子標簽的通訊質量,而本系統密集書庫機器人能夠根據智能控制系統指示,自動完成圖書清點、整理、上架、存取,系統通訊對圖書沒依賴。但本系統在實際運用中也存在許多不足之處,如運輸過程中傳輸帶滾輪轉動有噪音,需在不影響傳輸速度的基礎上進行減噪處理;傳輸帶穿插于座位之間,占用自習座位空間,考試高峰期圖書館座位資源供不應求的局面更嚴峻;座位智能借還系統涉及館舍改造、樓層重新布局,需要大量經費,會給原本資金緊張的圖書館帶來更大壓力。因此座位借還書系統需分步分區域實施,從局部到整體,在實踐中不斷完善。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小太陽畫報(2018年1期)2018-05-14 17:19:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
少年博覽·小學低年級(2016年10期)2016-11-24 06:48:23