非諧振式低頻電磁-摩擦電復合振動能收集器*
2020-11-06 03:23:24陳延輝謝偉博代克杰高玲肖盧山陳鑫李宇航牟笑靜4
物理學報 2020年20期
陳延輝 謝偉博 代克杰 高玲肖? 盧山 陳鑫 李宇航 牟笑靜4)?
1) (重慶大學, 光電技術與系統教育部重點實驗室, 重慶大學新型微納器件與系統技術國防重點學科實驗室, 重慶 400044)
2) (平高集團智能電力科技有限公司, 平頂山 467001)
3) (平頂山學院電氣與機械工程學院, 平頂山 467000)
4) (機械傳動國家重點實驗室, 重慶 400044)
5) (中國航天空氣動力技術研究院, 北京 100074)
1 引 言
隨著萬物互聯時代拉開序幕, 各種用于交互通訊的傳感器的需求數量急劇增加. 作為傳感系統的命脈, 可靠的能源供給是交互通訊網絡的關鍵因素. 然而目前大部分無線傳感網絡節點仍采用電池供電, 一方面, 電池有限的壽命給海量無線傳感網絡節點的電池更換或充電提出了巨大的挑戰; 另一方面, 化學能電池不僅難以抵抗高、低溫等惡劣環境, 而且會給環境造成污染. 因此無線傳感網絡節點供電問題已成為制約物聯網建設的瓶頸[1,2]. 環境振動能量是一種儲量豐富、分布廣泛的可再生清潔能源, 通過能量采集技術, 將環境中的機械能轉換為電能, 為無線傳感網絡節點供電, 是打破傳統供電方式限制的有效解決途徑[3?5].
電磁-摩擦復合能量采集技術已被證明是實現振動能量高效獲取與轉換的有效途徑[6?9]. 摩擦納米發電機(TENGs)具有較高的輸出電壓, 但是輸出電流只有微安級[10?11], 而電磁發電機(EMGs)的輸出電流可達毫安級[12?15], 兩者的組合可以滿足較高能量轉換的需求. 被譽為“納米發電機之父”的王中林院士[16]首先提出“納米能源”原創概念,并將納米能源推廣為“新時代的能源, 即物聯網、傳感網絡、大數據時代的分布式移動式能源”, 由此開啟了人類能源模式新篇章. 2018年王中林院士團隊[17]提出了一種具有內部拓撲結構的摩擦-電磁復合納米發電機, 成功實現了兩種發電原理的優勢補償. 其中電磁發電機在100 W的最優負載下, 峰值功率為4 mW, 摩擦發電機在的最優負載100 MW 下, 峰值功率為 0.5 mW. 2018 年中北大學薛晨陽教授和丑修建教授團隊[18]共同報道了一種用于收集水波能量的盒狀摩擦-電磁復合納米發電機. 在負載為 100 MW 時, TENG 的瞬時最大輸出功率為 0.08 mW, 在 1 kW 的負荷下, EMG 的瞬時最大輸出功率為14.9 mW, 該復合納米發電機可同時點亮60個發光二極管(LEDs). 2019年蘇州大學孫立寧教授, 劉會聰教授與新加坡國立大學Chengkuo Lee教授[19]共同提出了一種旋轉式電磁-摩擦電復合型能量采集器, 當驅動頻率為2 Hz,振幅為14 cm時, TENG和EMG的最大功率密度分別為3.25和79.9 W/m2, 證明了該裝置從多方向和寬頻率范圍環境中獲取能量的有效性; 2020年重慶大學牟笑靜課題組[20]提出了一種基于混沌擺式的電磁-摩擦復合能量采集器, 摩擦發電機的最大瞬時功率為15.21 μW, 電磁發電機的最大瞬時功率為1.23 mW, 成功實現了自供電無線傳感節點數據的遠程傳輸.
雖然近年來基于電磁-摩擦復合式的振動能量收集技術已經取得了一些階段性的進展, 但是其工程化應用依然面臨著眾多挑戰: 1)現有的能源收集裝置只有在較高頻且規則振動環境中才有較好的輸出, 而隨機、不規則的環境振動往往處于超低頻(<10 Hz), 因此高頻諧振器件很難實現復雜的環境振動能量的高效獲取與轉換; 2)大多數能源收集裝置采用具有較高摩擦阻力和較低靈敏度的滑動結構, 對于低頻的微弱環境振動響應效果差;3)雖然一些基于滾動起電的器件具有較高的魯棒性, 較低的材料磨損, 但它們往往只能在固定的方向滾動, 針對復雜多變的環境振動很難實現較高的換能效率.
綜合以上分析, 針對復雜多變的環境振動能量, 本文提出了一種非諧振式低頻電磁-摩擦復合振動能量采集裝置. 采用具有靈敏度高、魯棒性強、可360°旋轉俘能等特性的旋轉陀螺結構, 結合電磁-摩擦工作原理, 使系統能夠高效地俘獲低頻、不規則的環境振動能. 通過理論分析與軟件仿真,闡述了器件的工作原理; 基于線性電機平臺, 系統地研究了振蕩頻率和幅度對器件輸出性能的影響,較好地證明了器件收集振動能量的能力. 在2 Hz的振動環境下, 摩擦發電單元在20 MW負載下的峰值功率為 0.084 mW, 電磁發電單元在 800 W 負載下峰值功率為4.61 mW, 系統機電轉換效率為0.45%. 將器件分別置于人體的腿部和手臂, 分析了復合能量收集器件對于人體簡單運動能量的收集能力, 并結合能量存儲單元, 實現了計步器自供能的正常工作. 本項研究不僅為低頻振動能量的高效采集與轉換提供了一個嶄新的思路, 而且在自供電傳感網絡節點方面具有潛在應用價值.
2 設計與原理
2.1 結構模型
為了實現對波浪能的高效獲取與轉換, 本文提出了一種非諧振式低頻電磁-摩擦復合振動能量收集器件, 其結構模型如圖1(a)所示, 結構分解圖如圖1(b)所示. 其核心結構主要包括: 一個集自轉與公轉為一體的空心旋轉陀螺 (f35 mm × 40 mm),4 個 1000 匝的線圈 (f20 mm × 20 mm), 一個圓柱形釹鐵硼磁鐵 (f18 mm × 20 mm), 一個 PCB電極板 (f100 mm), 一個圓柱形框架 (f110 mm ×40 mm)和一些連接部件(圖1(c)). 空心旋轉陀螺與圓柱形框架均采用3D打印技術由白色樹脂打印而成. 在圓柱形框架的底部粘貼有一塊鍍有叉指錫層的PCB板, 用來作為摩擦電極, 其與粘貼在空心陀螺的外表面的FEP薄膜共同組成摩擦單元. 磁鐵采取與陀螺母線方向垂直的方式用熱熔膠固定于空心陀螺內部, 其與等距粘貼在圓柱形框架底部外側的4個線圈共同組成電磁發電單元(圖1(c)所示). 陀螺采用螺釘和套環連接方式固定在圓柱形框架的中心, 從而實現自轉滾動與公轉滾動. 為了減小陀螺在運動過程中的阻力, 將一個具有中孔(f3.5 mm)的圓球 (f4.5 mm)放置于連接環與螺帽之間. 整個系統的正反面實物照片如圖1(d), (e)所示. 在外界激勵的作用下, 旋轉陀螺將繞其頂點順時針或逆時針滾動, 從而實現360°旋轉俘能.
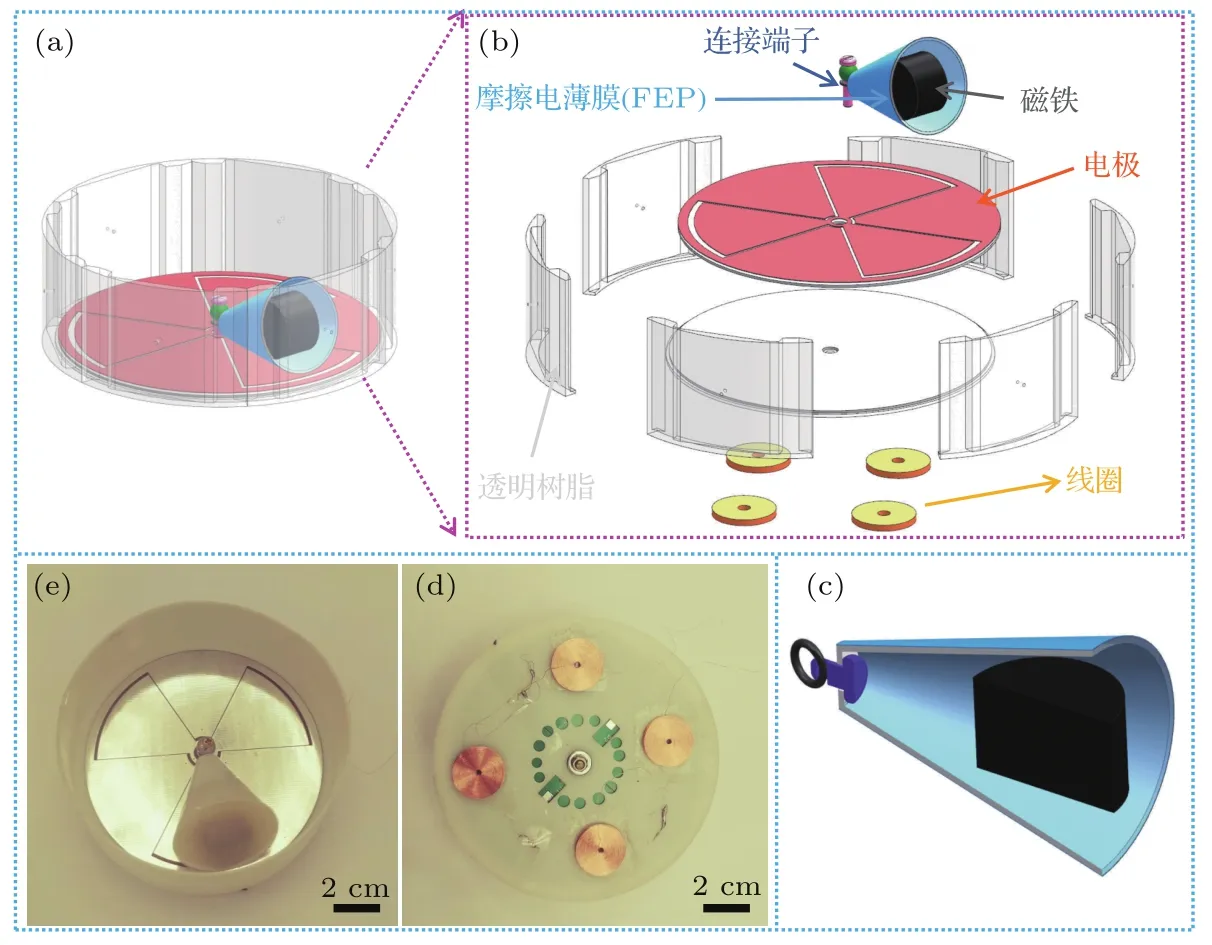
圖 1 系統結構模型 (a) 電磁-摩擦復合能量收集器模型圖; (b) 復合能量收集器結構分解示意圖; (c) 陀螺刨面圖; (d), (e) 電磁-摩擦復合能量收集器的正反面照片Fig. 1. The structure model of the system: (a) The model diagram of the hybridized nanogenerator; (b) schematic diagram of structural decomposition of the hybridized nanogenerator; (c) the cross-section of the gyro; (d), (e) digital photograph of the TENG and EMG hybridized nanogenerator.
2.2 理論分析
本文所提出的基于旋轉陀螺結構的滾動摩擦發電機模型可以等效為一個獨立滾動摩擦層(FEP)與一些金屬電極對(錫)之間的滾動摩擦起電過程.每相鄰的一對叉指電極與陀螺外層的摩擦材料(FEP)即可構成一個發電單元, 以一個發電單元為例詳細闡述其起電原理, 如圖2(a)所示. 當陀螺滾動到電極1上時, 由材料電負性可知, 金屬錫相對FEP具有更強的正電荷親和性[21], 因此會在電極1上積累一定數量的正電荷, 在FEP上積累相同數量的負電荷(圖2(a) Ⅰ); 當陀螺在外界激勵作用下從電極1向電極2上滾動時, 電極1上的正電荷將會通過外部電路由電極1流向電極2, 形成發電的前半周期(圖2(a) Ⅱ); 當陀螺由電極1完全滾動到電極2上后, 電極1上的正電荷也全部轉移至電極2上(圖2(a) Ⅲ); 隨后陀螺在外界激勵的作用下繼續滾動離開電極2, 電極2上的正電荷會通過外部電路回流到電極1, 從而在外部電路中產生反向電流(圖2(a) Ⅳ). 因此當陀螺在外部激勵的作用下, 在叉指電極上滾動時, 會產生交流發電過程. 采用 COMSOL 5.3 a 對圖 2(a)Ⅲ狀態下的表面電勢分布進行了仿真, 仿真結果如圖2(b)所示.
電磁發電機的起電過程為: 當陀螺在外部激勵下滾動時, 鑲嵌在其內部的磁鐵會隨著其一起滾動, 從而導致線圈內部磁通量的變化, 由楞次定律可知, 線圈中將會產生感應電流來阻礙磁通量的變化, 以一個線圈為例, 詳細闡述其起電過程, 如圖2(c).假設磁鐵正對線圈時為初始狀態, 此時線圈中沒有感應電流(圖2(c) Ⅰ); 當陀螺在外部激勵下產生滾動時, 磁鐵會隨著陀螺的滾動遠離線圈, 這時線圈內的磁通量將會減小, 因此線圈內將會產生一個順時針方向的電流來阻礙這種變化, 如圖2(c) Ⅱ所示; 當陀螺繼續滾動的足夠遠時, 線圈中磁通量為零, 這時磁鐵的運動不會使得線圈內產生感應電流 (圖 2(c) Ⅲ); 當磁鐵再次靠近線圈時, 線圈內將產生的一個逆時針的電流來平衡磁通量的變化(圖 2(c) Ⅳ). 利用 Maxwell 15.0 軟件對磁體的磁通線分布進行了仿真, 如圖2(d)所示.
由滑動摩擦解析方程可知[22], 摩擦發電機通過外部的電流可以表示為

式中,s為表面電荷密度,w為摩擦層的寬度,l為摩擦層的長度,v為陀螺的滾動速度,t為陀螺從電極1滾動到電極2上的時間. 由歐姆定律可知, 輸出電壓為

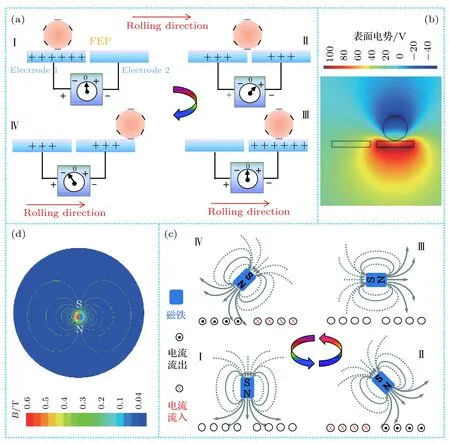
圖 2 復合能量收集器的工作原理及其仿真 (a) 摩擦發電單元的工作原理; (b) 摩擦發電單元的仿真; (c)電磁發電單元的工作原理; (d) 電磁發電單元的其仿真Fig. 2. The operating principle and simulation of the hybridized nanogenerator: (a) The operating principle of the TENG; (b) the simulation of the TENG; (c) the operating principle of the EMG; (d) the simulation of the EMG.
假設表面電荷密度為50 μC/m2, 由于本設計裝置中陀螺的母線長度為0.04 m, 摩擦層FEP薄膜貼在陀螺側表面, 因此可以設定摩擦長度l為0.04 m; 由于地面單個電極為半徑為 0.05 m, 圓心角度為60°的扇形, 因此可取扇形中位線的長度0.025 m為摩擦層的寬度w, 陀螺從電極1滾動到電極 2上的時間為 0.0001 s, 外部負載電阻為100 MW, 通過 Matlab 仿真可得, 摩擦發電單元輸出絕對值與陀螺滾動速度的關系曲線, 如圖3所示. 由圖3可知, 摩擦發電機的輸出與陀螺的運動速度成正相關關系, 由于滾動相對滑動具有較低的摩擦系數, 因此本文提出的基于旋轉滾動陀螺方案對外部激勵具有更優的俘能靈敏度.
由法拉第電磁感應定律可知, 電磁發電機的輸出電壓為[23]
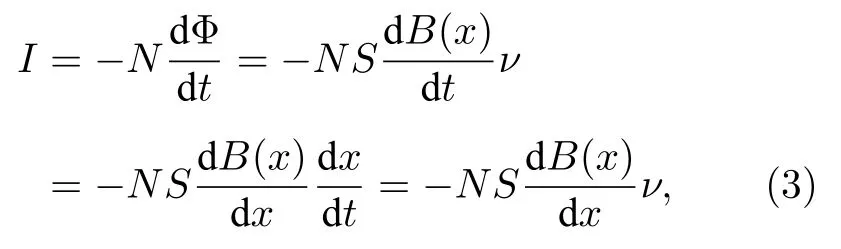
式中,N為線圈的匝數,B(x)為通過線圈的磁通量密度,S為線圈的面積,v為陀螺的滾動速度.
當線圈內阻為Rcoil時, 線圈中產生的短路電流可以表示為

因此, 電磁發電機的輸出電壓和電流均與陀螺的運動速度呈正相關關系.
3 結果與分析
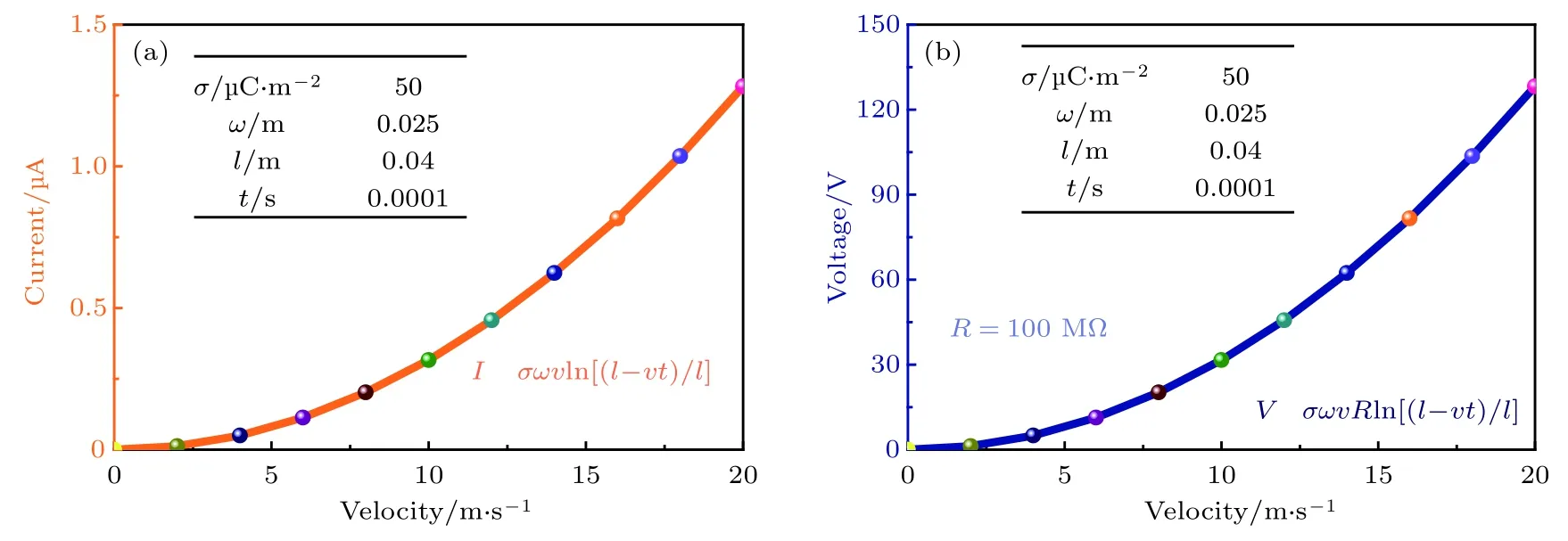
圖 3 摩擦發電機的輸出與陀螺滾動速度的關系 (a) 摩擦發電機的電流與陀螺滾動速度的關系; (b) 摩擦發電機的電壓與陀螺滾動速度的關系Fig. 3. The relation between the output performance of TENG and the rolling speed of gyro: (a) The relation between the output current of TENG and the rolling speed of gyro; (b) the relation between the output voltage of TENG and the rolling speed of gyro.
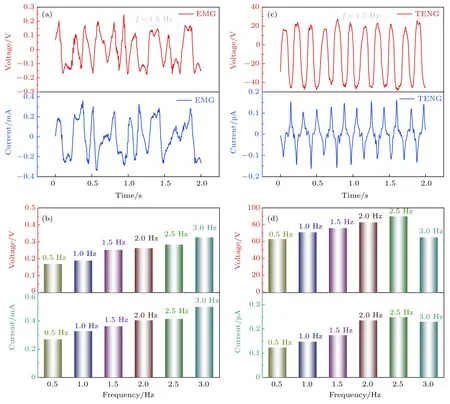
圖 4 在線性馬達不同激勵頻率下復合能量收集器的輸出特性 (a) 1.5 Hz頻率下電磁發電機的輸出特性; (b) 不同頻率下電磁發電機的輸出特性; (c) 1.5 Hz頻率下摩擦發電機的輸出特性; (d) 不同頻率下摩擦發電機的輸出特性Fig. 4. The output characteristics of the hybridized nanogenerator excited by a linear motor: (a) The output characteristics of the EMG in 1.5 Hz; (b) the output characteristics of the EMG in different frequencies; (c) the output characteristics of the TENG in 1.5 Hz; (d) the output characteristics of the TENG in different frequencies.
在直線電機平臺(型號為DGL200-AUM4)上對復合能量收集器的動態輸出特性進行了評估, 系統研究了振蕩頻率和幅度對復合能量收集器輸出的影響, 如圖 4所示. 為了降低系統的復雜性, 電磁發電機的四組線圈首先進行串聯, 然后將串聯后的輸出連接到測試設備上進行測量. 首先采用靜電計(型號為Keithley 6514)對電磁發電單元在不同頻率下的開路電壓與短路電流進行了表征, 如圖 4(a),(b)所示. 隨著頻率從 0.5 Hz 增大到 3.0 Hz,電磁發電機的開路電壓從0.17 V增大到0.33 V,短路電流從 0.27 mA 增大到 0.52 mA. 電磁發電機在0.5—3.0 Hz的超低頻率范圍具有較好的俘能效率, 并且輸出特性隨著頻率的增大而增大, 與理論分析吻合. 同樣表征了摩擦發電機在不同激勵頻率下 (0.5—3.0 Hz)的輸出特性, 如圖 4(c),(d)所示. 摩擦發電機的開路電壓和短路電流均隨著頻率的增大呈現出先增大后減小的趨勢, 在2.5 Hz時達到最大值 (90 V, 0.25 μA). 由前面理論分析可知摩擦發電機的輸出與陀螺的運動速度及頻率成正相關關系, 但是實際輸出結果當頻率大于2.5 Hz時表現出減小的趨勢, 造成這種結果的主要原因是, 摩擦發電機在較高頻率的外界激勵下, 處于高速旋轉, 在離心力的作用下出現反重力現象,這時旋轉陀螺不能與底部電極完全接觸, 從而使得有效摩擦面積減小, 輸出降低.
進一步通過調節線性馬達的往復行程, 模擬了復合能量收集器在不同振動幅度下的輸出, 如圖5所示. 圖5(a)為電磁發電機在馬達不同往復行程下的輸出, 圖5(b)為摩擦發電機在馬達不同往復行程下的輸出. 由測試結果可知, 復合能量收集器的輸出能量密度在馬達往復行程為200 mm時, 明顯高于其他行程下的輸出能量密度. 這是由于在相同頻率的外部激勵下, 當行程為200 mm時, 器件進入二次諧振模式, 旋轉速度明顯增大, 因此俘能效率達到最高.
為了評估器件的輸出性能, 分別測試摩擦發電機與電磁發電機在2 Hz振動激勵下, 不同負載下的輸出, 如圖6所示. 圖6(a)表明摩擦發電機在負載為20 MW時輸出功率最大, 約為0.084 mW.圖6(b)表明電磁發電機在負載為800 W時, 輸出功率最大, 約為 4.61 mW. 同時, 對復合能量收集器的充電能力進行了測試, 如圖6(c)所示. 首先分別對摩擦發電機和電磁發電機的輸出進行整流, 整流后的輸出并聯接到不同容量的電容兩端進行充電, 設定目標電壓為3 V, 充電曲線如圖6(c)所示.實驗證明復合能量收集器將10 μF電容充到3 V 大概需要 500 s的時間.
本文進一步對復合能量收集器件的俘能效率進行了評估. 首先對外部激勵能量進行估算. 由于摩擦發電機的由6個叉指電極單元組成(圖1所示), 因此每相鄰電極單元間隔角度為

式中n為摩擦叉指電極單元的個數. 因此可通過計算摩擦發電機各個峰值電壓點的時間差, 求得器件的瞬時角速度, 由于采用的摩擦發電機整流后的輸出波形進行計算, 因此器件的瞬時角速度為

式中ti為第i個峰值所對應的時間點. 從而可獲得器件的瞬時速度

式中r為圓錐體的高度. 從而可獲得陀螺的瞬時機械能為

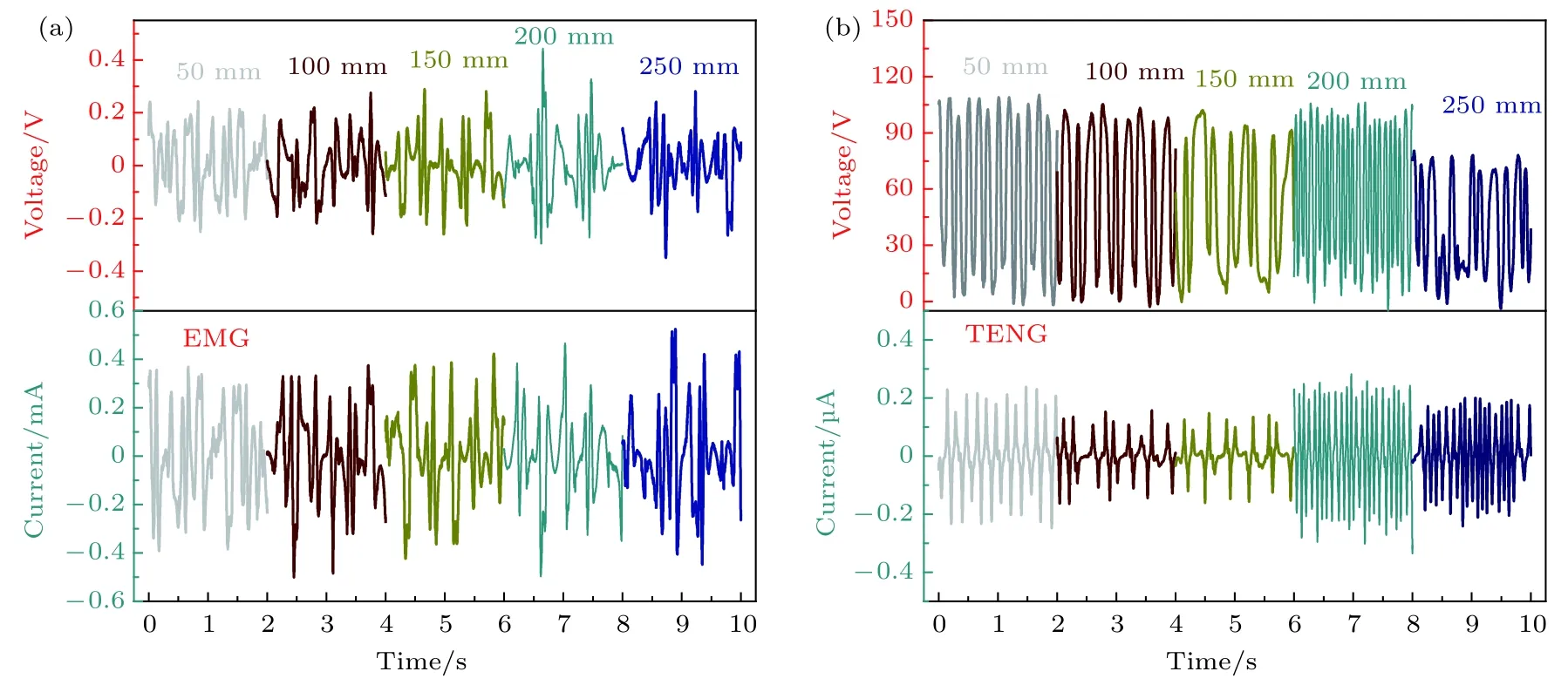
圖 5 線性馬達不同往復行程激勵下復合能量收集器的輸出特性 (a) 不同振動幅度下電磁發電機的輸出特性; (b) 不同振動幅度下摩擦發電機的輸出特性Fig. 5. The output characteristics of the hybridized nanogenerator under the excitation of different reciprocating stroke of the linear motor: (a) The output characteristics of the EMG under different amplitude; (b) output characteristics of TENG at different amplitudes.
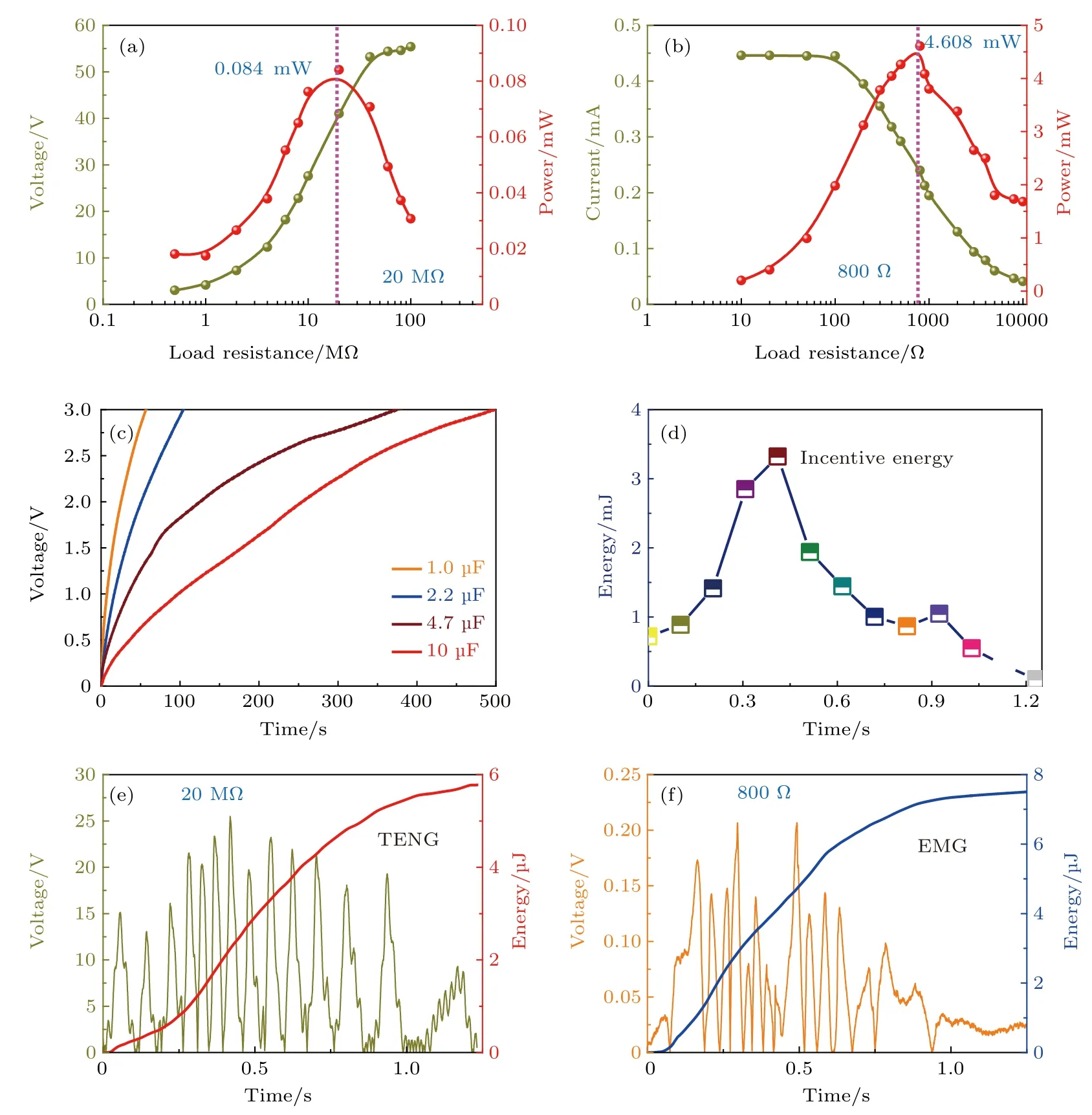
圖 6 復合能量收集器的功率與能量 (a) 摩擦發電機在不同負載下的輸出電壓與輸出功率; (b) 電磁發電機在不同負載下的輸出電壓與輸出功率; (c) 復合能量收集器對不同電容的充電曲線; (d) 單次外部激勵的機械能量; (e) 摩擦發電機在20 MW下的俘能曲線; (f) 電磁發電機在 800 W 下的俘能曲線Fig. 6. The power and energy of the hybridized nanogenerator: (a) The voltage and power curves of TENG under different loads;(b) the voltage and power curves of EMG under different loads; (c) the charging curves of the hybridized nanogenerator for different capacitors; (d) the incentive energy of a single excitation; (e) the output energy of the TENG under 20 MW; (f) the output energy of the EMG under 800 W.
假設器件第一個瞬時機械能即為單次外部激勵能量, 陀螺質量m為 0.0435 kg, 高度為 0.03 m,代入公式可求得單次外部振動能量E1, 結果如圖6(d)所示, 不同時刻的瞬時機械能采用了不同顏色進行標記. 可知單次外部機械能最大值約為0.003 J.
器件俘獲的電能為

在單次激勵下, 對摩擦發電機在20 MW負載下整流后的輸出波形進行積分, 結果如圖6(e)所示, 器件在單次激勵下累積俘獲的能量約為 5.8 × 10–6J;采用同樣的方法, 在單次激勵下, 對電磁發電機在800 W負載下整流后的輸出波形進行積分, 結果如圖6(f)所示, 器件在單次激勵下累積俘獲的能量約為 7.6 × 10–6J; 因此復合能量收集器在單次機械激勵下的總輸出為 1.34 × 10–5J; 因此器件的機電轉換效率為

進一步將復合能量收集器置于人體不同部位,對人體不同運動能量進行采集, 如圖7所示. 圖7(a)為電磁發電機在人體行走與跑步狀態下的輸出,圖7(b)為摩擦發電機在人體行走與跑步狀態下的輸出, 圖7(c)為電磁發電機在人體行走與跑步狀態下的輸出, 圖7(d)為摩擦發電機在人體行走與跑步狀態下的輸出. 可以看出復合能量收集器在人體行走與跑步狀態下均具有卓越的輸出人力, 同時跑步狀態下的輸出明顯優于行走狀態下的輸出, 置于腿部的輸出明顯優于置于手臂的輸出. 這是由于人體跑步狀態下的振動較行走下的振動更加劇烈,同一運動狀態下, 腿部的振動較手臂的振動更加劇烈. 此實驗充分驗證了該復合能量收集器件對于低頻復雜振動能量的俘獲能力.
為了驗證復合能量收集器在自供電傳感器中的應用, 搭建了一個自供電計步器模塊, 如圖8(a)所示. 摩擦發電機與電磁發電機的輸出分別整流后, 并聯到一個 100 μF 電容器的兩端, 首先對電容器進行充電, 此時開關處于斷開狀態. 由于計步器模塊的工作電壓為3 V, 因此當電容器的充電電壓略高與3 V時, 將開關閉合, 電容器存儲的能量可為計步器提供直流電能. 圖8(b)為100 μF電容器的充電曲線, 由圖8(b)可知, 將復合能量收集器置于人體腿部, 跑步大約 2000 s 后, 可將電容電壓充到3 V左右. 圖8(c)為開關閉合后, 計步器工作實物圖. 此實驗驗證該復合能量收集器在自供電傳感領域的應用前景.
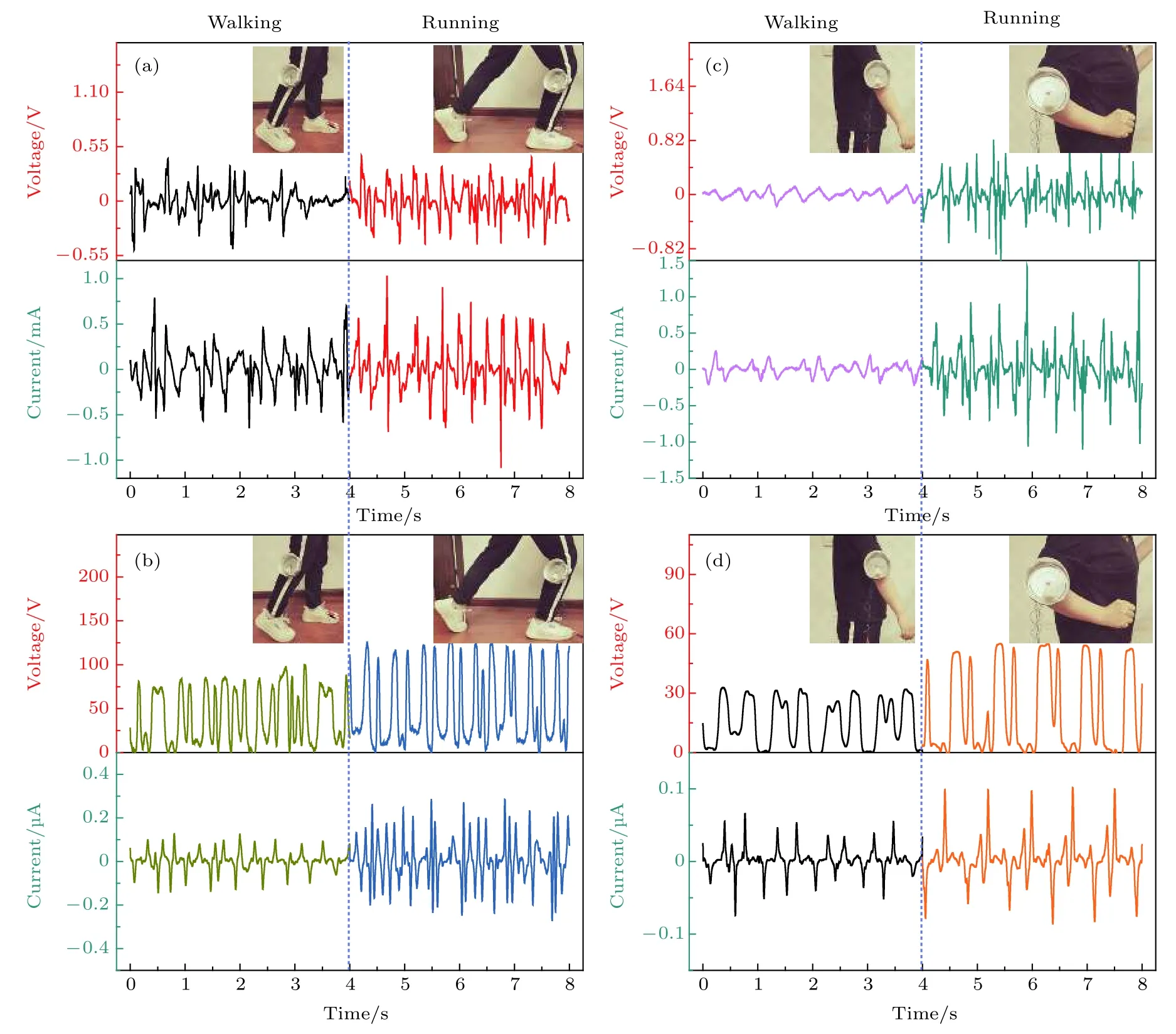
圖 7 復合能量收集器對人體運動能的收集能力 (a) 置于腿部, 電磁發電機對人體能量收集的輸出曲線; (b) 置于腿部, 摩擦發電機對人體能量收集的輸出曲線; (c) 置于手臂, 電磁發電機對人體能量收集的輸出曲線; (d) 置于手臂, 摩擦發電機對人體能量收集的輸出曲線Fig. 7. The ability of the hybridized nanogenerator to the kinetic energy of the human body: (a) The outputs of the EMG from human body when it is placed on the leg; (b) the outputs of the TENG from human body when it is placed on the leg; (c) the outputs of the EMG from human body when it is placed on the arm; (d) the outputs of the TENG from human body when it is placed on the arm.

圖 8 復合能量收集器在自供電傳感器中的應用實驗(a) 自供電計步器模塊圖; (b) 復合能量收集器對 100 μF電容的充電曲線; (c) 自供電計步器實物圖Fig. 8. The application of the hybridized nanogenerator in self-powered sensor: (a) The diagram of self-powered pedometer module; (b) the charging curves of the hybridized nanogenerator for a capacitor of 100 μF; (c) the photograph of self-powered pedometer module.
4 結 論
本文提出了一種非諧振式低頻電磁-摩擦電復合振動能收集器, 通過旋轉陀螺結構的設計, 實現了在低頻和不規則振動下的高靈敏度能量捕獲. 分析了器件的俘能機理, 建立了輸出與器件運動速度的理論模型. 基于線性電機平臺, 系統地研究了振動頻率和幅度對器件輸出性能的影響, 較好地證明了器件收集振動能量的能力. 在2 Hz的振動環境下, 摩擦發電單元在20 MW負載下的峰值功率為0.084 mW, 電磁發電單元在 800 W 負載下峰值功率為 4.61 mW, 系統機電轉換效率為 0.45%. 將器件分別置于人體的腿部和手臂, 分析了復合能量收集器件對于人體簡單運動能量的收集能力, 并結合能量存儲單元, 實現了計步器自供能的正常工作.本項研究不僅為低頻振動能量的高效采集與轉換提供了一個嶄新的思路, 而且在自供電傳感網絡節點方面具有潛在應用價值.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
故事作文·高年級(2021年12期)2021-12-21 02:32:35
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電力工程技術(2014年1期)2014-03-20 14:19:06