具有網絡攻擊的隨機系統狀態估計研究
2020-11-10 06:00:46余永龍
無線互聯科技 2020年15期
關鍵詞:系統
余永龍
(宿遷學院 文理學院,江蘇 宿遷 223800)
0 引言
近些年,網絡化控制系統的最優狀態估計問題得到了廣泛關注。隨著網絡化數據傳輸的廣泛應用,系統會出現隨機時滯、衰減、自相關噪聲等現象。另外,惡意的網絡攻擊現象也會出現。對具有這些網絡化數據失真現象的控制系統進行狀態估計器的設計具有現實意義。
網絡攻擊會使控制系統的性能變差,通過擴展卡爾曼濾波在受到惡意攻擊系統中的狀態估計[1]。針對網絡攻擊環境下的復雜網絡系統[2],研究了其分布式混合觸發狀態估計,這類分布式混合觸發狀態估計具有很好的精度。除了帶有網絡攻擊現象的隨機系統外,具有隨機時滯、多丟包和乘性噪聲控制系統的狀態估計也得到廣泛關注。針對具有一步隨機時滯和多丟包的網絡化控制系統,給出其最優線性狀態估計[3]。
本文將研究同時帶有縱向相關噪聲、一步隨機時滯、多丟包和網絡攻擊系統的最優狀態估計。通過對原始系統進行狀態擴維的方法,設計出最優狀態估計。最后,仿真例子驗證算法的有效性。
1 問題描述
考慮下列網絡化控制系統:
(1)
(2)
(3)

(4)

(5)
uk和λk均是互不相關且與其他信號不相關的隨機變量,均服從Bernoulli分布,且P{uk=1}=α,P{λk=1}=β,其中0≤α≤1,0≤β≤1。約定N∈[10,)時產生網絡攻擊現象。

2 最優狀態估計器
定理1 對擴維后系統,有下列最優狀態估計器:
3 仿真例子
設
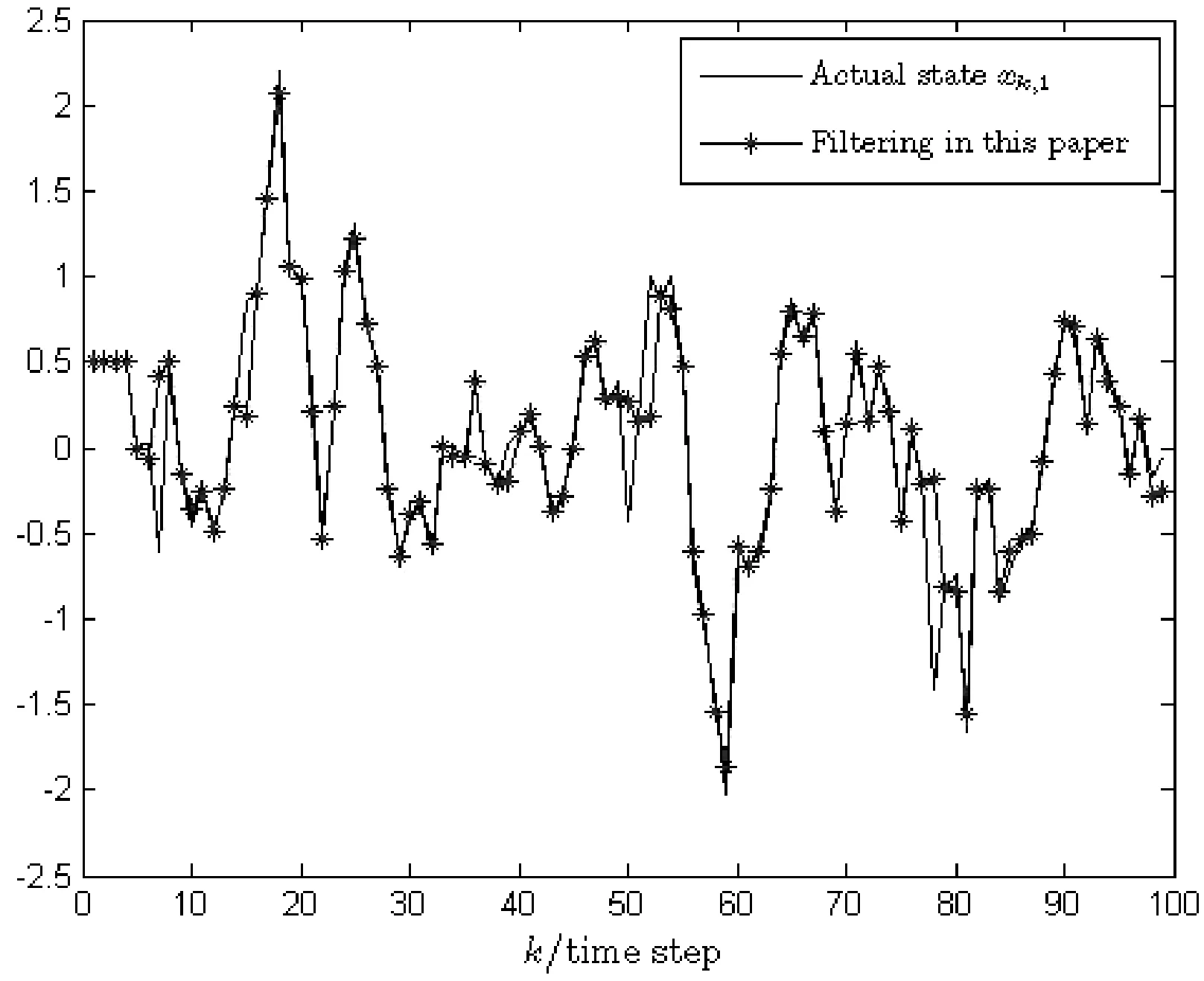
圖1 xk,1 及其估計的軌跡

圖2 xk,2及其估計的軌跡
4 結語
本文研究了同時帶有縱向相關噪聲、一步隨機時滯、多丟包和網絡攻擊的離散隨機系統的最優狀態估計。通過對原始系統進行狀態增廣,得到擴維系統。在線性無偏最小方差意義下設計了一個新的最優狀態估計器。最后,仿真例子驗證了算法的有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32