測繪導航高精度定位關鍵技術及應用
2020-11-17 07:27:36韓厚增袁德寶
導航定位與授時 2020年6期
王 堅,劉 飛,韓厚增,楊 誠,袁德寶,胡 洪
(1.北京建筑大學測繪與城市空間信息學院,北京 102616; 2.中國地質大學(北京)土地科學技術學院,北京 100083; 3.中國礦業大學(北京)地球科學與測繪工程學院,北京 100083; 4.安徽大學資源與環境工程學院, 合肥 230601)
0 引言
人工智能(Artificial Intelligence, AI)、衛星導航及室內定位三大技術的快速發展持續推動測繪科技向智能化、學科交叉、信息融合的方向發展[1-2]。2018年4月,教育部出臺《高等學校人工智能創新行動計劃》,旨在優化布局高校科技創新體系和學科體系,在新一代人工智能基礎理論和關鍵技術研究等方面取得新突破。2020年6月,我國成功發射北斗系統第55顆導航衛星,北斗系統星座部署提前半年全面完成,將全面進入應用推廣階段。2020年5月,中國衛星導航定位協會發布的《中國衛星導航與位置服務產業發展白皮書》顯示,基于室內定位與衛星導航的室內外一體化融合定位技術的突破與應用是位置服務大眾應用市場未來發展的關鍵,室內定位、5G、物聯網等技術的融合將成為拓展位置服務應用的主要解決方案,目前已形成室內外一體化高精度無縫定位體系,定位精度可達分米級,甚至厘米級[3-4]。
在國家戰略與市場化的雙重推動下,測繪科技的基礎理論、關鍵技術及儀器裝備都發生了變革,測繪的內涵與外延出現了巨大變化。智能化背景下,測繪學科與導航學科的交叉融合形成了測繪導航方向,并得到了蓬勃發展[5]。高精度定位理論、算法及智能硬件成為測繪導航方向的基礎支撐,應用場景可分為傳統變形監測、施工放樣、自然資源調查等低動態場景,無人駕駛、航空導航、武器制導[6]等高動態場景,以及火災、地震等低動態和高動態混合定位場景[7],詳細情況如圖1所示。
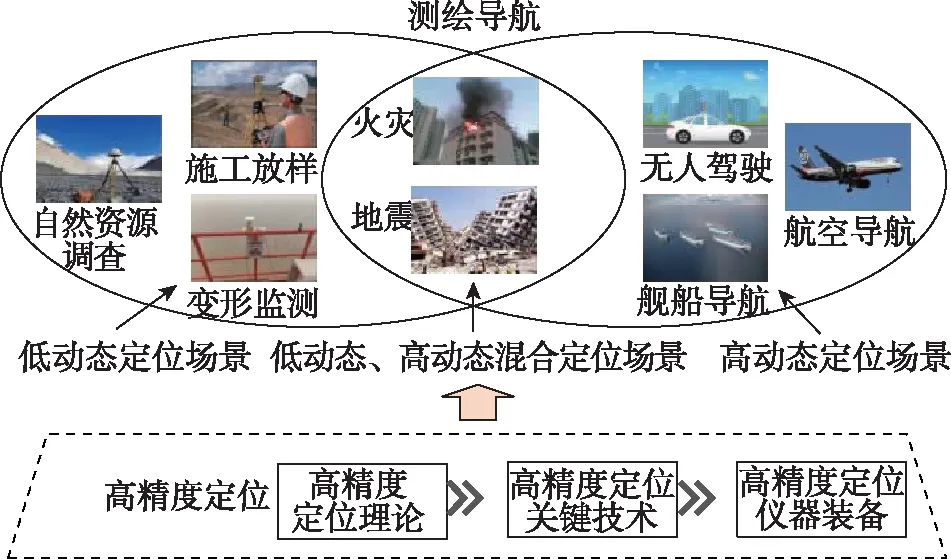
圖1 測繪導航方向主要內容Fig.1 Main contents of surveying and mapping navigation direction
本文從測繪導航高精度定位基本形態、智能濾波定位模型、測繪導航定位模組等關鍵技術,以及無縫組網定位應用、車載導航定位應用、變形監測應用3個解決方案進行闡述,介紹了測繪導航高精度定位的關鍵技術及應用基本情況。
1 測繪導航基本形態
1.1 測繪導航裝備虛擬化

圖2 測繪導航裝備向云端虛擬方向轉變Fig.2 Transformation of surveying and mapping navigation equipment to cloud and virtualization
如圖2所示,隨著北斗衛星導航系統(BeiDou Navigation Satellite System,BDS)/全球導航衛星系統(Global Navigation Satellite System,GNSS)多模接收機、AI定位芯片以及嵌入式導航定位模組等技術與裝備的快速發展,出現了GNSS、慣性、視覺、激光雷達等多種類型的導航與定位傳感器,促使測繪導航裝備形態發生了變化。在大數據、物聯網、邊緣計算和云計算等技術的推動下,測繪導航裝備逐漸朝著云端虛擬化方向發展。在工程實踐中,可以實時在線預處理前端測繪導航硬件采集的數據,或通過物聯網傳輸至云端平臺進行遠程在線解算,為用戶提供高精度、實時定位與位置服務信息。導航裝備發展呈現出高智能、高精度、高自動化和高抗干擾的特點,最終催生了測繪導航裝備云端虛擬化發展的新業態。
1.2 測繪導航數據處理多樣化
如圖3所示,傳統測繪數據處理主要是外業測量—內業處理模式,通常表現為事后解算、人工處理、計算器計算和單線程計算等。隨著深度學習、AI、分布式計算等先進計算技術的使用,傳統的數據處理模式逐漸向著云端實時處理、機器智能處理、邊緣計算和分布式計算的方向發展,呈現出了較高的現勢性、成效性、時效性和智能化水平。
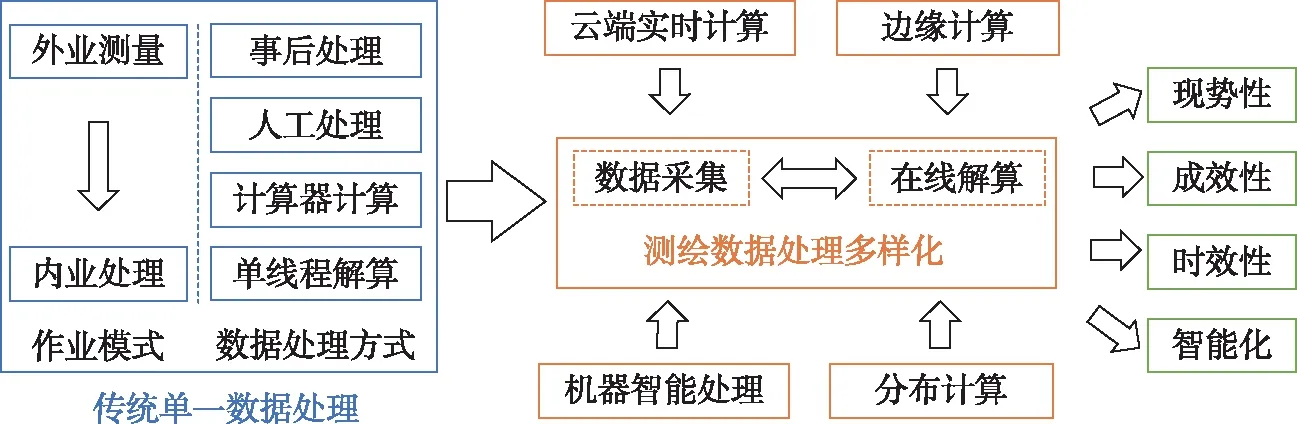
圖3 測繪導航數據處理模式的轉變Fig.3 Transformation of surveying and mapping navigation data processing mode
2 智能濾波定位模型
2.1 Kalman濾波模型
Kalman濾波(Kalman Filter,KF)理論是測繪導航領域應用最廣、使用最成熟的濾波模型,在產品制造中應用廣泛。KF基于最小均方誤差原則,對線性系統的狀態參數進行最優估計,其流程如圖4所示。KF主要通過狀態預測與狀態更新2個過程對系統的狀態參數進行估計。狀態預測過程主要是利用上一解算歷元的狀態參數、方差和系統的動力學模型對當前歷元的系統狀態參數進行預測,然后使用濾波增益方程和狀態更新方程對預測的系統狀態參數進行優化更新,以提高系統狀態參數的估計精度。KF算法顧及了上一解算歷元的信息,并將其作為狀態參數當前歷元的先驗信息,所以定位精度比僅考慮單歷元定位信息的傳統最小二乘法更優[8-9]。
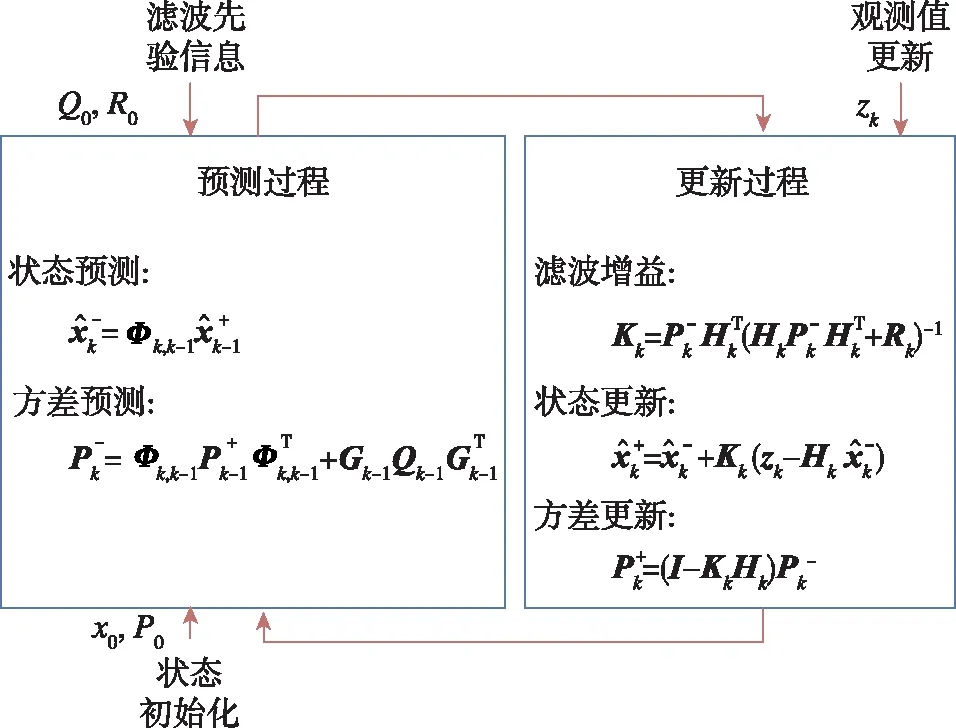
圖4 Kalman濾波算法流程Fig.4 Flow architecture of Kalman filter algorithm
標準KF是基于運動模型解決簡單線性定位問題[10],而針對非線性和復雜線性問題常采用擴展Kalman濾波(Extended Kalman Filter,EKF)、無跡Kalman濾波(Unscented Kalman Filter,UKF)、容積Kalman濾波(Cubature Kalman Filter,CKF)和粒子濾波(Particle Filter,PF)等。EKF采用一階泰勒級數對非線性函數進行展開,進而滿足標準KF的線性函數模型要求。UKF和CKF屬于Sigma Kalman濾波,都采用有限樣本點,在高斯分布的基礎上,對狀態參數的高斯分布進行擬合。PF基于貝葉斯理論和蒙特卡羅算法,采用樣本點對狀態參數的后驗分布進行估計,回避了狀態參數高斯分布的假設,可以逼近最優估計。表1描述了各種KF方法解決的問題和實現途徑。
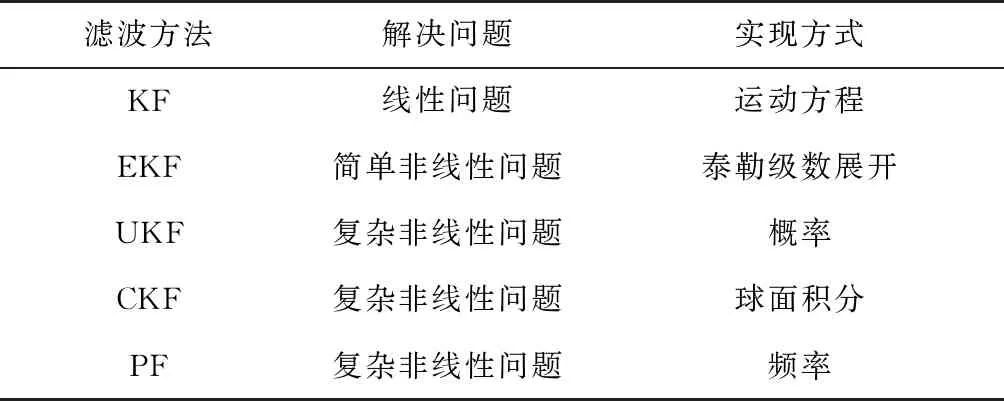
表1 Kalman濾波適用范圍
若觀測值和參數預報值均服從正態分布,KF能給出狀態參數的可靠解。但當觀測值受到異常污染或動力學模型擾動引起的預報狀態參數異常時,KF解將受到嚴重歪曲。傳統算法采用Sage-Husa自適應濾波和有限記憶濾波等,通過降低異常觀測或異常預報狀態參數來提高抗差性能[11]。針對同時出現觀測異常和動力學模型擾動的情況,楊元喜院士建立了一種新的自適應抗差濾波理論,應用抗差權與自適應因子分別進行異常值觀測及動力學模型誤差的調節,從而得到了平滑的定位結果;并先后構建了四種動力學模型誤差學習統計量和四種自適應因子,具體見文獻[12]。
在復雜環境中,由于觀測模型或動力學模型存在較大的非線性,使用泰勒級數展開的EKF會引入較大的非線性誤差,使用UKF或CKF能夠有效提高系統的狀態參數估計精度。Yang等[13]針對UKF的動力學模型擾動,構建了新的極值函數,提出了基于自適應因子的自適應無跡Kalman濾波(Adaptive Unscented Kalman Filter,AUKF),并進一步構建了基于抗差因子的自適應抗差無跡Kal-man濾波來處理動力學模型擾動和觀測異常[14]。在室內超寬帶(Ultra Wide Band,UWB)定位中,由于傳統的非線性濾波無法對觀測粗差進行抑制,使用抗差非線性Kalman濾波可以有效地提高室內定位精度[15]。
針對組合導航的函數模型高非線性問題,PF也被廣泛應用于對組合導航系統狀態參數的估計。PF的估計精度在一定程度上取決于重要性密度函數(Importance Density Function,IDF)和粒子的數目。PF的重采樣過程中,會造成粒子退化和枯竭問題,結合模擬退火算法可以有效解決粒子退化問題[16]。
2.2 智能濾波定位模型
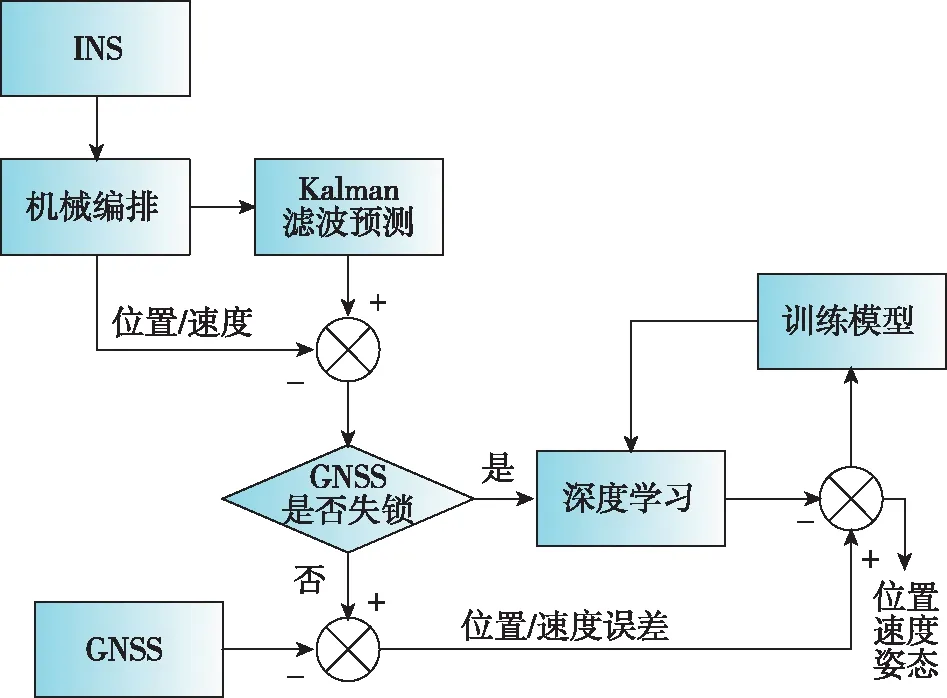
圖5 基于神經網絡的GNSS/INS智能融合定位模型Fig.5 GNSS/INS intelligent fusion location model based on neural network
KF模型一般采用時不變的模型參數,在實際狀態中,與神經網絡等智能模型結合,可建立更加符合實際的動態模型,并形成智能融合模型。慣性傳感器的零偏誤差存在隨時間漂移的問題,導致誤差模型無法準確地對傳感器誤差進行估計[17]。因此,需要對誤差模型的參數進行實時調整,以便對傳感器的誤差進行準確估計。針對GNSS與慣性測量單元(Inertial Measurement Unit,IMU)組合導航系統中,衛星系統受到遮蔽,IMU獨立工作精度降低較快的問題,可以通過神經網絡在GNSS信號完好時對導航系統的誤差進行學習;在衛星信號受到遮蔽的情況下,對導航系統誤差進行估計和補償,以提高導航定位精度[18]。如圖5所示,神經網絡和KF融合構成慣性導航系統(Inertial Naviga-tion System,INS)/全球定位系統(Global Positio-ning System,GPS)集成智能定位模型。GNSS可用時,采用深度學習對INS定位的非線性誤差進行建模;GNSS失鎖后,神經網絡可以預測INS定位的非線性誤差,從而提高定位精度。然而,GNSS與INS的組合仍然存在傳感器自身的局限性。在面對無人駕駛的挑戰中,復雜環境下長時間連續可靠的導航定位對定位精度和可靠性提出了更高的要求。在目前主流的GNSS與INS組合導航的基礎上,需要對周邊的場景進行感知,并提供冗余的導航信息。因此,需要使用不同的傳感器獲取不同的導航信息,例如影像傳感器和雷達傳感器等。進一步,亦可通過深度學習技術與傳統濾波算法相結合,對載體周邊環境進行感知、分類和提取,充分挖掘不同傳感器多元異構數據間的有效信息,對傳感器數據本質進行精確描述,從而提高誤差模型的準確性,促進導航系統的智能化。智能定位模型在無人駕駛云定位和智能測繪儀器終端等領域將會獲得廣泛應用,AI芯片也將成為相關產品的核心組成部件[19]。
3 測繪導航定位模組關鍵技術
3.1 模組研制技術流程
模組是進行測繪導航產品二次開發的關鍵零部件之一,具備相對獨立的功能,可以嵌入到無人駕駛智能終端、機器人導航終端及武器終端等各類設備中。隨著導航與位置服務產業的發展,測繪導航模組將在各個領域得到廣泛應用。定位模組研制技術是高精度定位應用的重要支撐。圖6描述了車載導航模組研發的主要流程,大致可分為印制電路板(Printed Circuit Board,PCB)設計、制板、模組測試和模組量產4個階段。
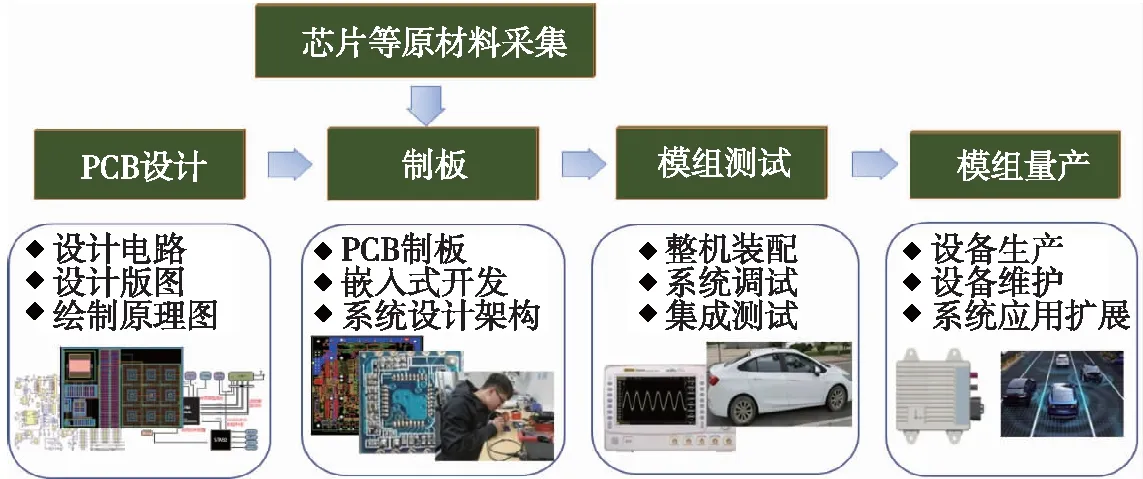
圖6 定位模組研發技術流程Fig.6 Technical flow of positioning module research and development
3.2 嵌入式效率優化
模組的嵌入式固件屬于資源受限系統,計算效率的提高是一個關鍵問題。嵌入式效率優化通常有替換算法,如選擇快速排序方法;匯編法,對關鍵部分進行改寫,以提高運算速度;空間換時間法,如在設計數據結構時,為了減少協議數據結構的循環延時,對數據結構的層次關系進行擴展,采用內存空間來換取時間;避免遞歸法,盡量不使用遞歸;采用內存池減少頻繁的小對象的分配和釋放等方法。
除了采用以上嵌入式效率優化途徑外,在測繪導航模組研制過程中,本文提出了圖7所示的三項技術用于提高模組的整體性能:第一是原始信息同步采集與延時補償,通過建立多源傳感器時間同步誤差估計和補償模型,構建融合時間補償參數的狀態方程,提高GNSS/INS傳感器時鐘精確匹配的穩健性,實現匹配精度優于1μs;第二是自適應定位算法代碼穩健性,通過研制自適應定位理論模型與算法,按MISRA C編程規范標準編寫穩健代碼,實現分米級-厘米級-毫米級多層次、高精度的GNSS/INS導航模組開發;第三是嵌入式固件高效解算,采用序貫更新策略,時間片輪轉、優先級搶占、共同語句結構協作等多線程機制,達到時間分片的目的,降低嵌入式平臺的資源消耗,實現固件高效解算。

圖7 嵌入式固件高效解算Fig.7 Efficient solution of embedded firmware
3.3 高精度定位模組
基于上述技術,研制覆蓋分米、厘米及毫米級定位精度的無縫定位模組、車載導航模組及變形監測模組,如圖8所示。開發相應的定位終端,并給出了各自應用的解決方案,進行應用推廣。下文將重點介紹系列模組在不同場景中的應用情況。

圖8 分米/厘米/毫米級無縫定位模組Fig.8 Decimeter/centimeter/millimeter positioning module
4 無縫組網定位應用
無縫定位是指通過室外定位技術和室內定位技術相結合的方式解決室內外高精度定位和無縫銜接的問題,是國際領域研究前沿,在國內外得到了極大的重視和發展。例如中國提出了羲和計劃、美國部署了洞悉戰場計劃和下一代911項目、歐盟開展了伽利略本地技術計劃等。隨著北斗等全球四大衛星導航定位系統全部在線運行,在室外環境下可以提供實時、全天候、全球性的高精度導航信息,能夠滿足多領域的應用需求。在室內雖然有WIFI、UWB、射頻(Radio Frequency,RF)、藍牙等多種技術手段可以實現米級精度定位,但是高精度室內目標定位問題仍然極具挑戰性。
GNSS/UWB融合無縫定位技術是比較常見的高精度無縫定位解決方案,在機器人導航、無人駕駛導航、工廠倉庫物料調度、監獄服刑人員監控、應急救援力量監控等多類場景得到廣泛應用。
4.1 無縫組網定位解決方案
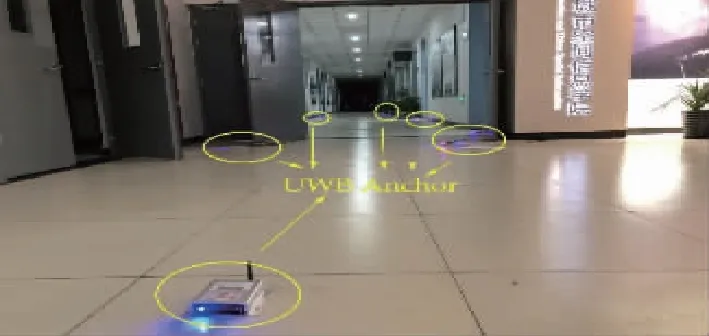
首先,在建筑物的安全通道、窗戶等與室內通視的地方布設GNSS/UWB設備,構建區域定位基準,用于將GNSS定位基準傳遞到室內。其次,在過渡區域且與室內外通視的區域布設UWB設備,測量自身到基站的距離并傳輸至服務系統,服務系統通過邊長交會算法確定該點坐標,以此類推,自動獲得3個以上的UWB點位坐標。在室內定位基準構建時,首先,按照一定的規則將這些設備放在走廊和房間里;然后,第一個錨點位置上的UWB設備測量該點與過渡區域內至少3個錨點的距離,將其傳輸至云平臺,利用云平臺計算出近似坐標,并通過測邊網平差方法對室內UWB網絡進行平差處理,以提高網絡精度[20];最后,救援人員攜帶UWB標簽進入室內,通過測量與周圍基站的距離信息,并傳輸至云平臺,實現自身高精度定位。該技術能快速實現GNSS信號遮蔽/半遮蔽區域的坐標基準建立和高精度定位,解決火災救援應急定位、綜采面人員安全定位、智能建造無縫位置服務等問題。詳細過程如圖9所示。
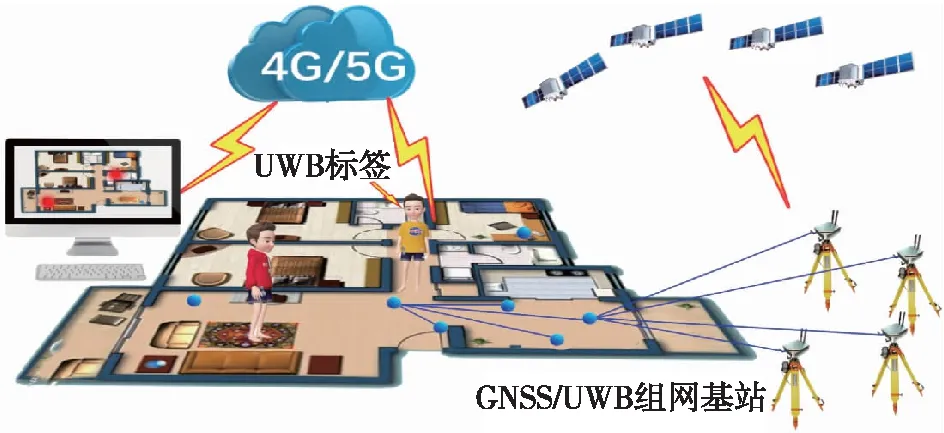
圖9 室內外無縫定位解決方案Fig.9 Seamless indoor and outdoor positioning solution
4.2 無縫組網定位終端
圖10(a)是UWB組網基站,支持4G通信,支持標簽和基站兩種工作模式(自動/手動切換),可實現分米級精度定位。圖10(b)是GNSS/UWB組網基站, 支持4G通信,支持GNSS、UWB、GNSS/UWB三種工作模式(自動/手動切換),適應室內外一體化定位環境(室外GNSS模式、過渡區GNSS/UWB模式、室內UWB模式)。

(a)UWB組網基站

(b)GNSS/UWB組網基站圖10 應急組網定位裝備Fig.10 Emergency networking positioning equipment
4.3 無縫組網定位案例
模擬某大樓發生火災、斷電場景。原有定位基站無法工作,煙霧導致救援人員無法區分方向,需要室內外無縫定位提供位置服務。圖11(a)是模擬火場,由大樓入口、大廳、走廊和實驗室等組成,長60余米(X軸),寬10余米。圖11(b)是消防員由室外進入室內攜帶并布設的GNSS/UWB、UWB組網設備。圖11(c)是組網臨時坐標基準建立后實現的消防員定位軌跡和定位誤差,其中,藍色軌跡點是魯棒擴展Kalman濾波定位算法解算的移動軌跡,與黑色實線表示的真實軌跡基本一致,計算結果表明平面定位誤差約為0.37m,且90%的點位誤差小于0.5m。因此,該無縫定位技術和方案能實現分米級精度人員定位,滿足室內外無縫應急定位的重大導航需求。

(a)模擬火場大樓
(b)組網設備布設
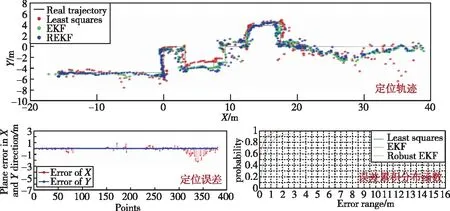
(c)無縫定位軌跡及定位誤差圖11 火場無縫定位模擬實驗Fig.11 Simulation experiment of seamless location in fire scene
5 車載導航定位應用
5.1 高精度無人駕駛導航解決方案
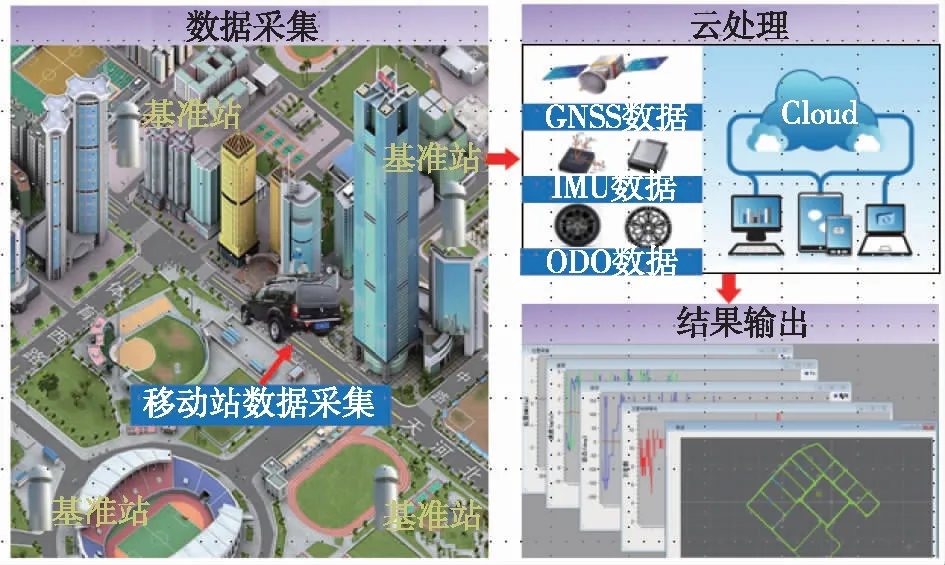
圖12 高精度無人駕駛導航云方案Fig.12 High precision unmanned navigation cloud scheme
圖12給出了本文采用的高精度無人駕駛云導航解決方案。基于GNSS基準站,無人駕駛車采集GNSS數據、IMU數據和里程計數據,并實時傳輸至云端進行計算,輸出計算結果輔助無人駕駛。提前在云端布設高精度GNSS RTK/INS/Odometer的多源異構數據融合定位算法,具有實時性、高精度、高可靠和低成本的特點。
5.2 車載導航定位終端
圖13所示為車載導航終端(INAV2.0),能實現實時動態(Real-Time Kinematic, RTK)模式定位精度2cm+基線距離×1×10-6、姿態測量精度0.01°和航向角測量精度0.02°。該裝備可為車輛提供厘米級定位定向數據。

圖13 iNAV2.0組合導航模塊Fig.13 iNAV2.0 integrated navigation module
5.3 無人駕駛導航定位案例
在開闊環境、樓宇遮擋、樹木遮蔽、高架橋環境和城市隧道5種城市環境開展了600km測試。基于GNSS RTK/INS/Odometer的無人駕駛導航測試如圖14所示,不同GNSS信號遮蔽程度下無人駕駛導航偏差不同:遮蔽越嚴重,偏差越大。以高精度GNSS與光纖IMU組合導航系統作為參考,對上述環境下的定位精度進行評價,具體導航位置均方根誤差見表2:開闊環境下平面均方根誤差為毫米級,高程1.4cm;樓宇遮擋環境下,平面均方根誤差為2cm,高程3.3cm;高架橋環境下,普通GNSS無法產生有效定位數據,但GNSS RTK/INS/Odometer組合導航平面定位精度可達0.2m,具有良好效果;城市隧道環境下,僅依靠INS/Odometer融合定位,30s內定位精度優于0.4m、1min內定位精度約1m、2min內優于2m。

圖14 測試環境Fig.14 Test environment

表2 不同測試環境下無人駕駛導航位置均方根誤差
6 變形監測應用
6.1 變形監測云解決方案
變形監測云解決方案主要包括高精度GNSS/MEMS IMU監測終端和光纖光柵應力傳感器等構成的數據采集系統、4G/5G/WIFI構成的數據傳輸系統、基于云計算的數據處理系統和手機等移動終端構成的用戶服務系統。該方案流程是采集多源異構數據,通過數據傳輸系統實時發送至云端數據處理系統進行計算與安全評估,最后將變形監測結果實時發送至用戶服務系統。詳細情況如圖15所示。
該方案集成了BDS/GNSS/MEMS IMU高精度融合數據處理模型、邊緣計算和云計算的優勢,具有高精度、低延遲、全天候、常態化實時監測的特點,能解決滑坡、橋梁等構筑物變形體/震動體的智能監測與快速預警問題。
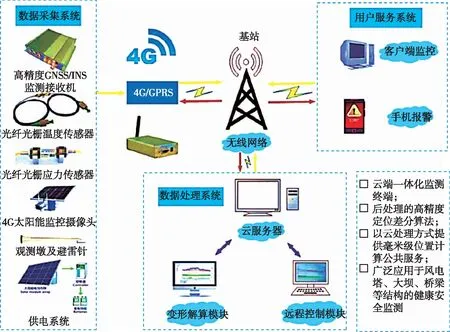
圖15 變形監測云端解決方案Fig.15 Cloud solution for deformation monitoring
6.2 變形監測軟硬系統終端
圖16所示為高精度GNSS/MEMS IMU監測硬件終端,體積小、質量小、易于安裝與攜帶,能夠實時在線數據傳輸,并兼容BDS/GPS/GLONASS/GALILEO四系統導航定位信號。它集成了BDS/GNSS/MEMS IMU多系統數據采集處理,實現了多源異構數據云在線緊耦合毫米級高精度定位服務。

圖16 高精度GNSS/MEMS IMU監測硬件終端Fig.16 High precision GNSS/MEMS IMU monitoring terminal
圖17所示為高精度變形監測軟件系統,圖17(a)是軟件登錄界面,圖17(b)是軟件監測界面,實時監測衛星星空圖、信噪比、接收衛星數量和DOP值等信息,以及東北天三維形變量和累計位移變化。

(a)軟件登錄界面
(b) 軟件監測界面圖17 高精度變形監測軟件系統Fig.17 High precision deformation monitoring software system
6.3 變形監測應用案例
高速公路等邊坡地形陡峭,地基土層松軟、巖石風化,滑坡風險系數高。圖18所示為山西省呂梁某高速公路施工沿線邊坡滑坡變形監測與預警系統的監測位置、監測站設備安裝和監測軟件系統。

(a)滑坡監測區域位置

(b)邊坡地形與監測設備安裝
(c)變形累計位移量
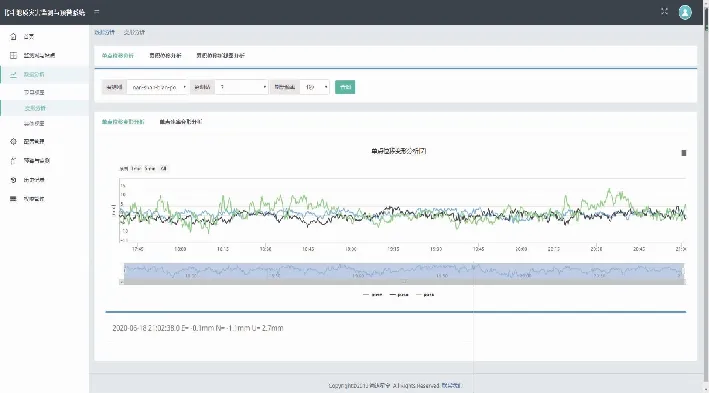
(d)東北天變形量實時監測圖18 滑坡變形監測與預警Fig.18 Landslide deformation monitoring and early warning
某監測站點24h連續監測東北天三維累計變形量位移分別為:E-0.01mm,N-0.08mm,U-0.32mm;24h連續監測東北天形變標準差分別為:E-1.92mm,N-2.81mm,U-5.83mm。
7 結論
高精度定位催生了測繪導航研究領域,拓展了測繪學科的內涵與外延。本文重點研究了高精度定位關鍵技術及其應用,形成了以下結論:
1)測繪導航裝備呈現出高智能、高精度、高自動化和高抗干擾的特點;數據處理呈現出了較高的時效性和智能化水平,測繪導航裝備虛擬化與數據處理多樣化將成為測繪導航的基本形態。
2)智能定位模型在多傳感器融合和復雜場景下定位具有較大優勢,未來將會在無人駕駛定位和智能測繪儀器終端研制等領域獲得廣泛應用。
3)基于GNSS/UWB的無縫組網定位技術,能夠快速實現GNSS信號遮蔽/半遮蔽區域的坐標基準建立和高精度定位,解決火災救援應急定位、綜采面人員安全定位、智能建造無縫位置服務等問題。
4)本文提出的GNSS RTK/INS/Odometer技術可以在樓宇遮擋、樹木遮蔽、高架橋環境和城市隧道等城市環境下獲得較好的定位效果。
5)變形監測系統可實現毫米級定位精度,能夠解決滑坡、橋梁等構筑物變形體/震動體的智能監測與快速預警問題。隨著智能濾波算法和定位模組生產工藝的不斷發展,高智能、高精度的定位終端研制將會不斷取得突破。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
光學精密工程(2016年6期)2016-11-07 09:07:19
衛星與網絡(2015年12期)2015-10-27 02:21:46