利用改正數信息的北斗三號實時精密單點定位及性能分析
2020-11-17 07:27:40解世超王浩浩黃觀文
導航定位與授時 2020年6期
王 樂,解世超,王浩浩,岳 帆,黃觀文
(長安大學地質工程與測繪學院,西安 710054)
0 引言
2020年6月23日,北斗三號最后一顆全球組網衛星發射成功,標志著北斗三號星座部署完成。北斗三號星座包括三種類型軌道衛星,分別為3顆地球靜止軌道(Geostationary Earth Orbit, GEO)衛星、3顆傾斜地球同步軌道(Inclined Geo Synchronous Orbit, IGSO)衛星和24顆中圓地球軌道(Medium Earth Orbit, MEO)衛星。目前,北斗三號部分衛星尚未對外提供服務或服務產品精度低。同時,GEO衛星和IGSO衛星由于觀測數據數量和質量等原因,服務效果有待提高。
隨著北斗系統實時應用領域的不斷拓展和深入,用戶對實時定位精度的要求越來越高。目前,能夠提供用于單點定位的實時產品主要包括廣播星歷[1]、超快速星歷[2]和實時改正數信息[3]。很多學者對此進行了大量研究。孟祥廣等研究表明,北斗二號廣播星歷軌道精度基本優于2m,鐘差精度約為10ns[4]。王海春等通過試驗獲得的北斗三號衛星廣播星歷軌道三維方向精度優于1m,鐘差精度優于3.5ns[5]。可見,北斗廣播星歷軌道和鐘差精度相對較低。黃觀文等研究表明,超快速星歷預報6h鐘差精度約為1ns,12h優于3ns[6]。楊宇飛等分析得到,北斗二號超快速鐘差預報24h精度約為7~9ns[7]。可見,超快速產品預報鐘差精度較低。張龍平等計算的北斗二號IGSO和MEO衛星實時軌道精度優于30cm[8]。王樂等研究了北斗三號衛星實時軌道和鐘差解算方法,獲取的北斗三號MEO衛星實時軌道和鐘差優于30cm和0.5ns[9]。
在利用實時改正數信息進行實時精密單點定位方面,夏鳳雨等利用改正數修正廣播星歷后的實時精密單點定位各方向精度均優于20cm[10]。王樂等利用播發的全球定位系統(Global Positioning System,GPS)實時改正信息計算的實時定位平面和高程精度分別優于10cm和20cm,收斂時間約為40min[11]。劉行波等基于北斗二號實時軌道和鐘差,利用雙頻信號獲得了分米級動態定位精度,收斂時長約為1h[12]。但是,目前針對北斗三號實時精密單點定位性能分析的研究較少。
本文首先利用全球分布的國際GNSS監測評估系統(international GNSS Monitoring and Assessment System, iGMAS)和多模GNSS實驗網絡(the Multi-GNSS Experiment,MGEX)監測站解算了北斗三號衛星實時精密軌道和鐘差,并獲取了實時改正數。然后利用改正數和廣播星歷分別進行了雙頻靜態、雙頻動態、單頻靜態、單頻動態仿實時定位,并分析了其定位精度和收斂時長等性能。
1 利用改正數信息的實時精密單點定位方法
利用實時改正數進行實時精密單點定位,在獲取測站實時觀測數據和廣播星歷的同時,還需獲取衛星實時精密軌道和鐘差改正數,并進行實時軌道和鐘差改正。在進行單頻實時精密單點定位時,還可能需要高精度的實時電離層參數信息。
實時改正數信息通過星歷數據期號(Issue of Data Ephemeris, IODE)參數與廣播星歷進行匹配,進而進行參數修正。對于GPS、GLONASS和GALILEO系統,IODE可從廣播星歷直接獲取,但是北斗三號廣播星歷中相應位置參數暫不可用,因此本文IODE通過廣播星歷中周內秒參數計算獲取,具體方法參考文獻[13],實時軌道和鐘差解算參考文獻[9]。
1.1 實時軌道改正
實時軌道改正數信息中包含軌道坐標系下切向、法向和徑向的衛星位置和速度改正數[14]。通過與廣播星歷進行匹配并修正后,可獲取高精度衛星軌道。
改正數播發具有一定時間間隔,通過參考時刻軌道改正數計算當前時刻實時軌道[13],主要可概括為以下步驟:
1)根據軌道坐標系下參考時刻衛星位置和速度改正數,計算當前時刻衛星位置改正數;
2)根據計算的當前時刻廣播星歷衛星位置和速度,計算軌道坐標系到地心空間直角坐標系的旋轉矩陣;
3)計算當前時刻地心空間直角坐標系下衛星位置改正數,并獲取衛星精確位置。
1.2 實時鐘差改正
設鐘差改正數在參考時刻t0時的多項式系數為C0、C1、C2,則當前時刻t時以距離形式表示的鐘差改正值δC為[15]
δC=C0+C1(t-t0)+C2(t-t0)2
(1)
經改正后的衛星精密鐘差δt為
(2)
式中,C表示真空中光的傳播速度;δts表示廣播星歷t時刻的衛星鐘差。
1.3 實時精密單點定位
利用實時獲取的軌道、鐘差改正數和廣播星歷,按上述1.1和1.2節中的方法計算當前時刻的精密軌道和鐘差,對觀測數據進行預處理后,采用濾波方法進行實時精密單點定位[16]。具體數據處理流程如圖1所示,數據處理策略如表1所示。
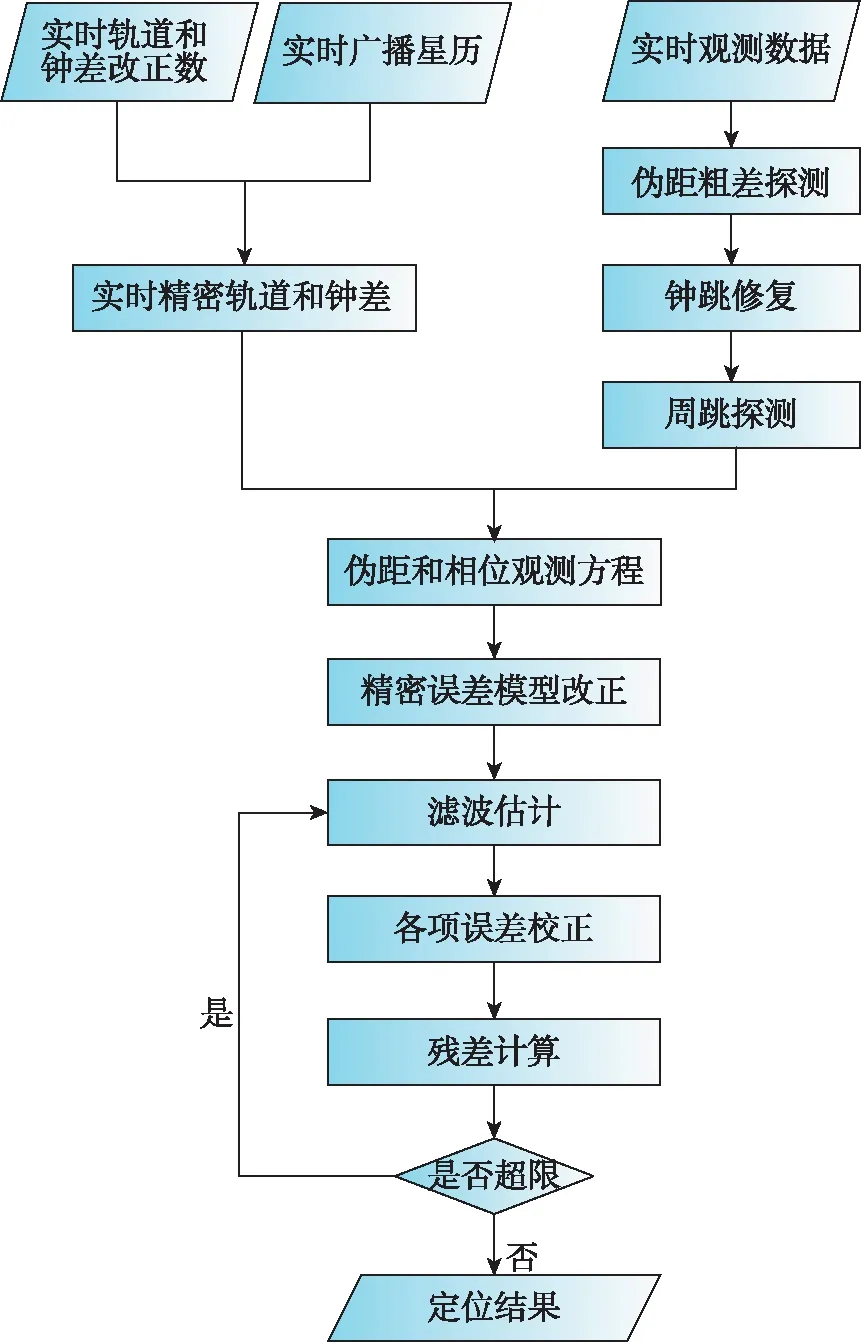
圖1 實時精密單點定位數據處理流程Fig.1 Data processing flowchart of RT PPP
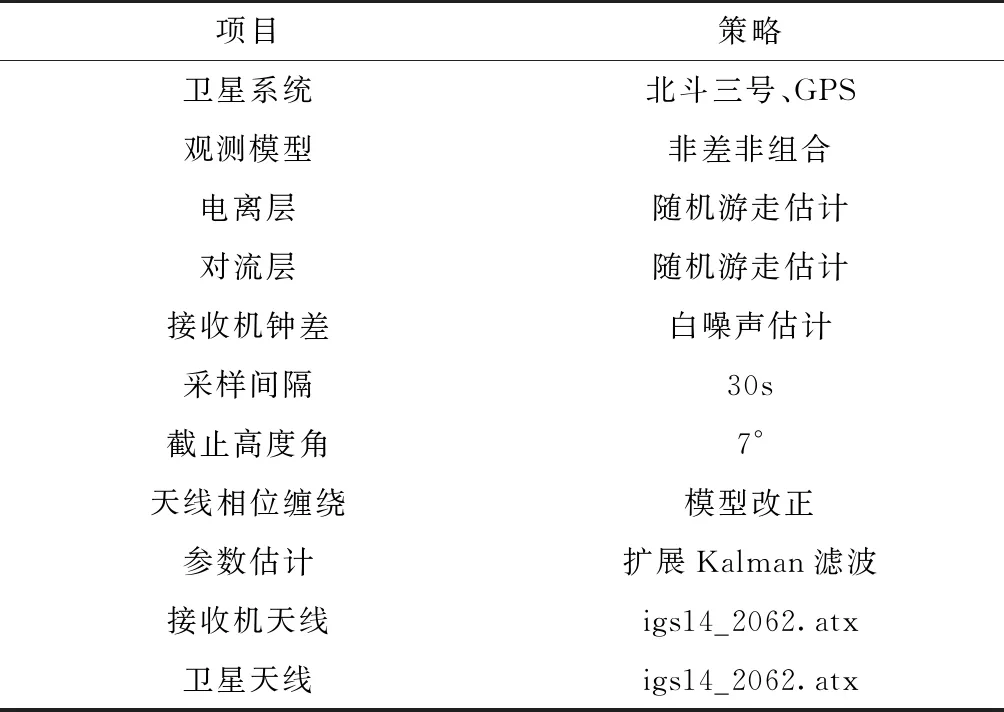
表1 實時精密單點定位數據處理策略
2 實時改正數精度分析
利用北斗三號和GPS雙系統觀測數據實時解算了2020年6月23日(年積日175)的實時軌道和鐘差產品。
2.1 實時軌道精度分析
選取全球分布的可接收北斗三號B1I/B3I頻點雙頻信號的13個iGMAS和45個MGEX監測站的觀測數據,測站分布如圖2所示。圖2中,藍色圓點表示iGMAS監測站,橙色圓點表示MGEX監測站。北斗三號目前僅有部分MEO衛星可提供穩定服務,且缺乏與國際GNSS服務組織(International GNSS Service, IGS)14框架一致的衛星以及接收機相位中心等相關改正,單北斗解算效果相對較差,加入GPS觀測數據與北斗三號同時處理可在保障解算效率的同時,將軌道與鐘差產品同IGS14框架對齊,并提高測站坐標和對流層延遲改正等公共參數的解算精度。為同時保證解算效率和精度,僅選取部分北斗三號MEO和GPS衛星參與解算。選取72h實測數據進行高精度精密定軌,并通過擬合外推方法獲取高精度預報軌道。每隔1h解算一次,選取預報部分2~3h弧段作為實時軌道,并匹配到最近的實時廣播星歷,生成實時軌道改正數。
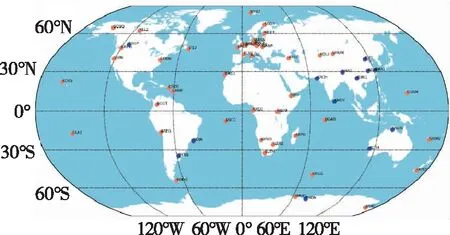
圖2 實時精密定軌測站分布圖Fig.2 Stations distribution of real-time precise orbit determination
除了傳統的動力學法精密定軌模型和策略,本文實時精密軌道及改正數解算策略和關鍵模型還包括:太陽光壓模型選取ECOM 5參數模型;測站坐標從IGS發布的igs20P2086.snx文件中提取或通過事后精密單點定位解算,并對其進行緊約束;北斗三號MEO衛星天線相位中心改正采用北斗官方發布的地面標定值,其他接收機天線和衛星天線相位中心改正均來自IGS發布的igs14_2062.atx文件。
選取武漢大學iGMAS分析中心發布的精密快速軌道產品為基準,評定北斗三號MEO衛星實時軌道一維精度。統計其一維均方根(Root Mean Square, RMS)如圖3所示。
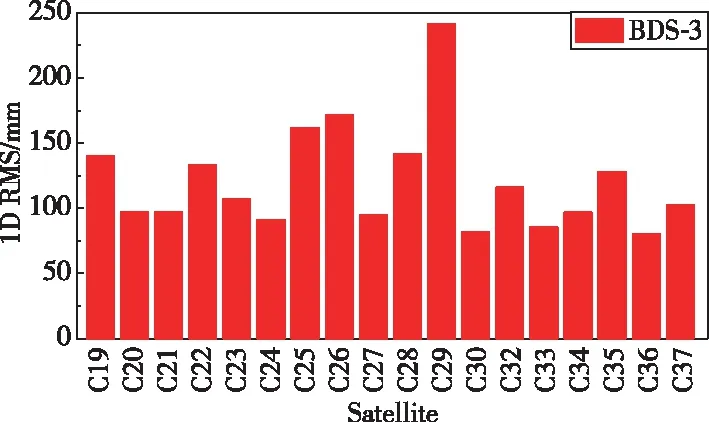
圖3 北斗三號MEO衛星實時軌道精度統計Fig.3 Real-time precise orbit accuracy statistics of BDS-3 MEO satellites
從圖3可以看出,目前解算的北斗三號所有MEO衛星實時軌道精度均優于25cm,大部分衛星優于15cm,均值約為12cm。除C29衛星精度稍差,其他衛星精度基本一致,完全滿足實時精密定軌的精度要求。
2.2 實時鐘差精度分析
選取全球分布的10個iGMAS和35個MGEX監測站,由于北斗三號單系統實時鐘差估計存在與上述單系統精密軌道解算相同的問題,故采用北斗三號和GPS雙系統聯合解算。采用采樣間隔為1s的BDS B1I/B3I和GPS L1/L2P實時高頻觀測信號,基于2.1節解算的實時精密軌道進行實時衛星鐘差估計。測站分布如圖4所示。
在進行實時衛星鐘差估計時,采用無電離層組合觀測量,并根據高度角定權、模型改正相位纏繞和相對論效應等,固定衛星軌道和測站坐標。將每個測站的天頂對流層延遲作為分段常數進行估計,每個連續弧段的模糊度作為常數進行估計,衛星和接收機鐘差作為白噪聲進行估計。
選取武漢大學iGMAS分析中心發布的精密快速鐘差產品為基準,進行二次差比較[17],評定北斗三號MEO衛星實時鐘差內符合精度。統計其標準偏差(Standard Deviation, STD)如圖5所示。
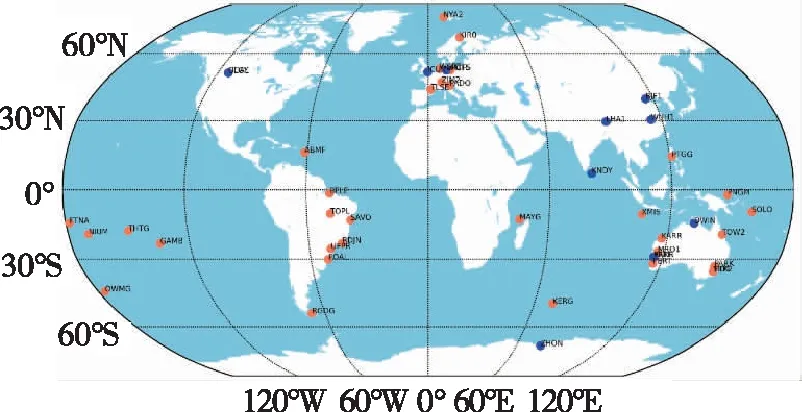
圖4 實時精密衛星鐘差估計測站分布圖Fig.4 Stations distribution of real-time precise clock offset estimation
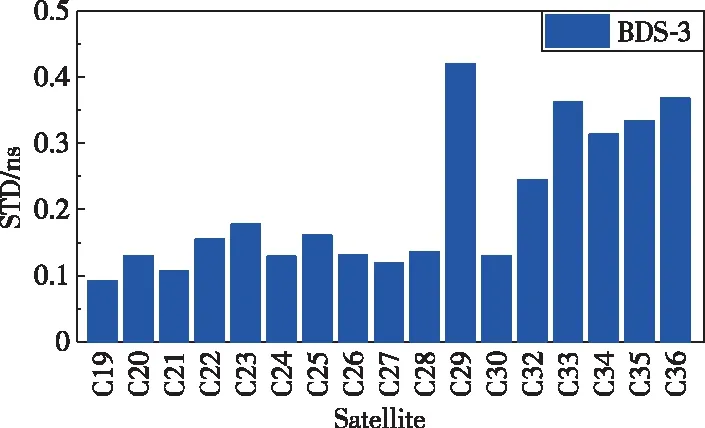
圖5 北斗三號MEO衛星實時鐘差內符合精度統計Fig.5 Real-time precise clock offset accuracy statistics of BDS-3 MEO satellites
從圖5可以看出,北斗三號MEO衛星實時鐘差STD值大部分優于0.35ns,平均STD值約為0.2ns。其中,C29衛星受實時軌道精度影響,解算精度偏差;C32~C36衛星實時鐘差精度明顯低于其他衛星,原因為上述衛星的實時觀測數據量相對較少。隨著北斗三號地面監測站的建設和測站接收機的升級,這一現象將得到改善或消失。
3 實時精密單點定位精度分析
選取8個MGEX測站2020年第175天4~14時共10h的數據,利用上文解算的衛星實時軌道和鐘差改正數進行北斗三號/GPS雙系統仿實時精密單點定位解算,測站信息如表2所示。
本文分別利用上述測站觀測數據進行了雙頻靜態、雙頻仿動態、單頻靜態和單頻仿動態仿實時精密單點定位。然后以IGS公布的周解坐標為基準,計算E、N、U這3個方向的偏差。當E、N、U方向連續10min位置偏差小于30cm時,認為收斂。
由于篇幅原因,本文僅隨機選取了yar3測站展示定位結果的時間序列圖。
3.1 雙頻靜態定位
各測站雙頻靜態實時精密單點定位收斂時間及精度統計結果如表3所示。yar3測站雙頻靜態定位時間序列圖如圖6所示。
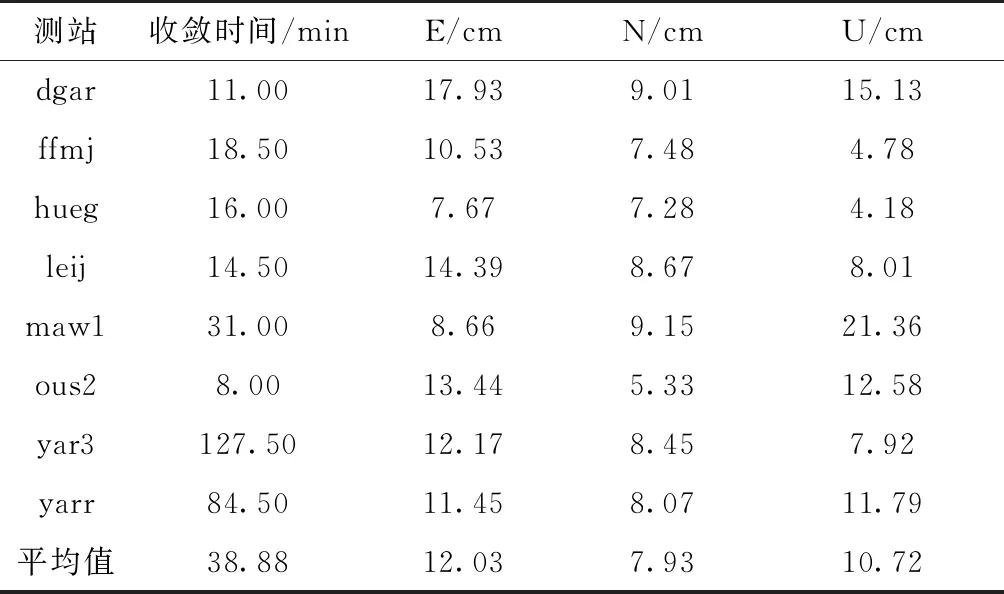
表3 雙頻靜態定位結果統計
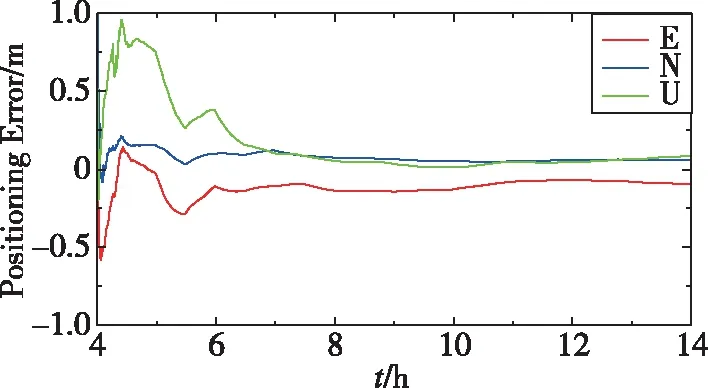
圖6 yar3測站雙頻靜態定位時間序列圖Fig.6 Dual-frequency static positioning time series of yar3 station
由表3可知,雙頻靜態實時精密單點定位收斂后,E方向精度基本優于15cm,N方向精度優于10cm,U方向精度各站差別相對大,約在5~21cm之間,平均約為11cm。各測站的收斂時間差別較大,平均約為40min。初步分析,不同測站收斂時間存在差異的原因是各個測站的數據質量不同,并且初始時衛星的空間幾何分布也有所不同。不同測站定位精度存在差異的原因可能是各個測站的數據質量不同,并且各站數據解算過程中對軌道和鐘差產品的誤差影響的抑制效果也存在差別。從圖6可以看出,雙頻靜態實時精密單點定位收斂后結果穩定。
3.2 雙頻動態定位
各測站雙頻動態定位收斂時間及精度統計結果如表4所示。yar3測站雙頻動態定位時間序列圖如圖7所示。
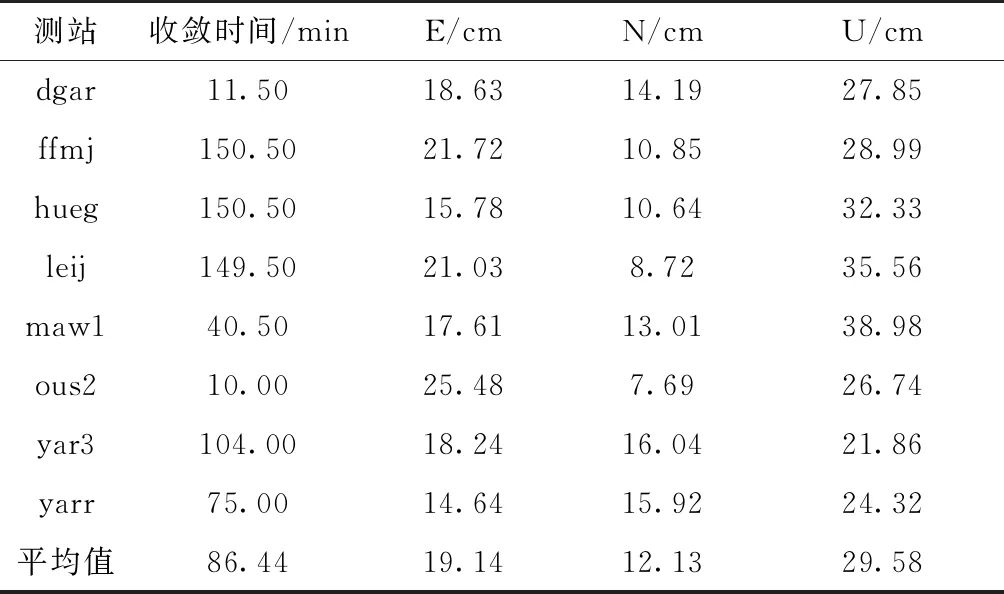
表4 雙頻動態定位結果統計
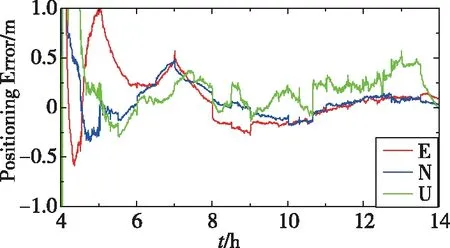
圖7 yar3測站雙頻動態定位時間序列圖Fig.7 Dual-frequency kinematic positioning time series of yar3 station
由表4可知,雙頻動態定位E方向平均精度優于20cm,N方向優于15cm,U方向優于30cm。各測站平均收斂時間約為85min。從圖7可以看出,雙頻動態定位結果收斂后仍有亞分米級、甚至分米級波動。
3.3 單頻靜態定位
各測站單頻靜態定位結果如表5所示。yar3單頻靜態定位時間序列圖如圖8所示。
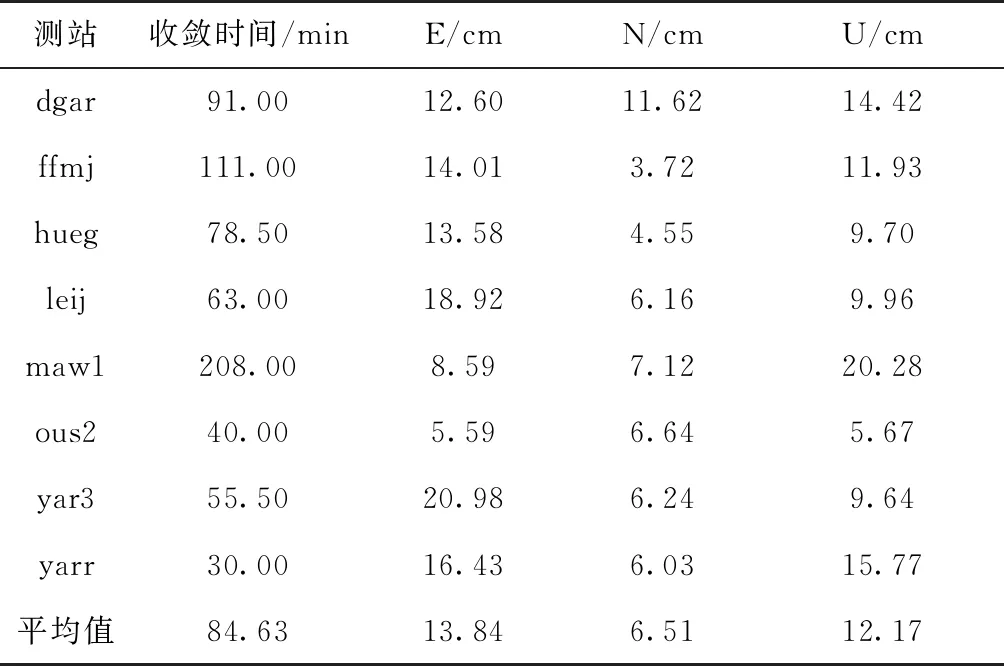
表5 單頻靜態定位結果統計

圖8 yar3測站單頻靜態定位時間序列圖Fig.8 Single-frequency static positioning time series of yar3 station
由表5和圖8可知,單頻靜態定位N方向平均精度優于10cm,E和U方向優于15cm,平均收斂時間約為85min,收斂后定位結果穩定。
3.4 單頻動態定位
各測站單頻動態定位結果如表6所示。yar3單頻動態定位時間序列圖如圖9所示。
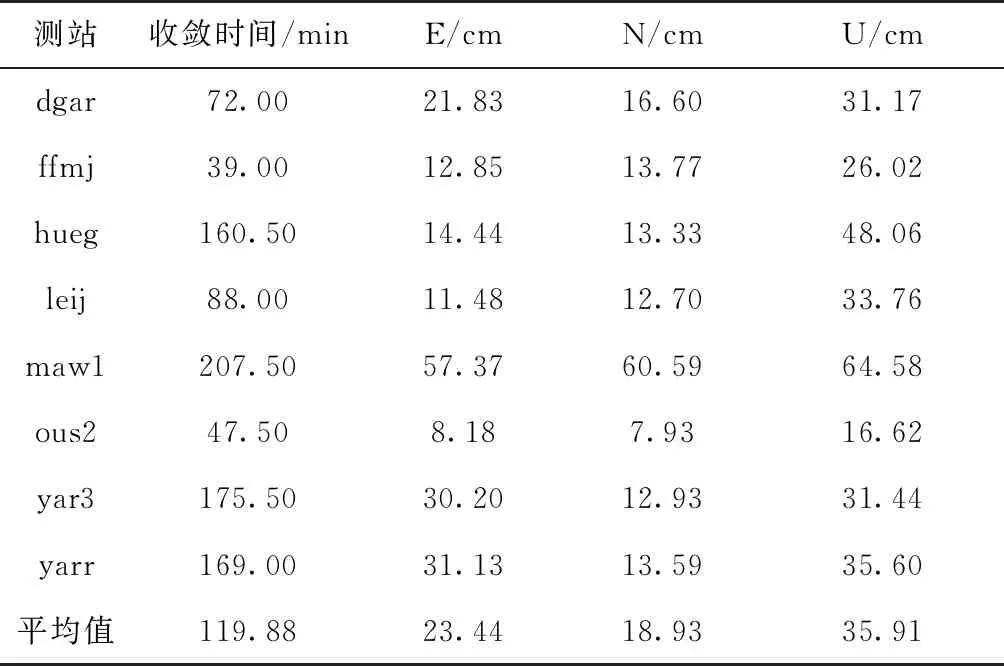
表6 單頻動態定位結果統計
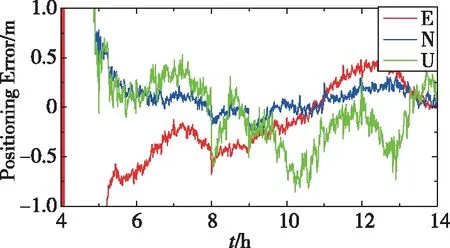
圖9 yar3測站單頻動態定位時間序列圖Fig.9 Single-frequency kinematic positioning time series of yar3 station
由表6和圖9可知,單頻動態定位E、N、U方向平均精度分別約為25cm、20cm和35cm,平均收斂時間約為120min,收斂后結果仍有較大波動。
4 結論
本文針對利用實時改正數信息的北斗三號實時精密單點定位進行了系統的研究,完整計算了北斗三號MEO衛星實時軌道和鐘差改正數,以及雙頻/單頻靜態/動態實時精密單點定位,并對其進行了評估分析,研究結果表明:
1)除個別衛星,北斗三號MEO衛星實時精密軌道平均精度基本優于15cm,均值約為12cm;實時精密鐘差平均精度基本優于0.35ns,均值約為0.2ns。解算的實時改正數信息滿足實時精密單點定位需求。
2)利用改正數信息進行的實時精密單點定位,單雙頻靜態定位E、N、U方向精度分別優于15cm、10cm、15cm;雙頻動態定位精度分別優于20cm、15cm、30cm;單頻動態定位精度分別約為25cm、20cm和35cm。靜態定位精度高于動態定位,雙頻定位精度高于單頻定位,均達到分米級。
3)雙頻靜態定位收斂時間約為40min,單頻靜態和雙頻動態定位收斂時間均約為85min,單頻動態定位收斂時間約為120min。靜態定位收斂時間短于動態定位,雙頻定位收斂時間短于單頻定位。靜態定位收斂后結果穩定,動態定位收斂后結果仍存在波動。
4)隨著正式對外提供高精度服務的北斗三號衛星數量增多和可接收北斗三號觀測信號的地面監測站的建設或升級,北斗三號實時精密單點定位等服務性能將進一步提升。