基于S7-1200PLC的小型立體倉(cāng)庫(kù)控制系統(tǒng)設(shè)計(jì)
2020-11-18 13:10:18
制造業(yè)自動(dòng)化 2020年11期
(南陽(yáng)理工學(xué)院,南陽(yáng) 473004)
0 引言
為響應(yīng)國(guó)家智能制造戰(zhàn)略,打造數(shù)字化工廠,自動(dòng)化立體倉(cāng)庫(kù)越來(lái)越受到企業(yè)界關(guān)注,對(duì)其需求量和各方面性能要求越來(lái)越高。因此,對(duì)自動(dòng)化立體倉(cāng)庫(kù)的深入研究可以產(chǎn)生巨大的社會(huì)效益和經(jīng)濟(jì)效益[1~3]。堆垛機(jī)器人作為立體倉(cāng)庫(kù)的核心執(zhí)行設(shè)備,其性能指標(biāo)將會(huì)對(duì)倉(cāng)儲(chǔ)系統(tǒng)的運(yùn)行效率產(chǎn)生重大影響,包括其運(yùn)行的平穩(wěn)性,高速性,定位精確性等,因此,設(shè)計(jì)一種更加可靠、高效、精準(zhǔn)的運(yùn)動(dòng)控制算法具有重大現(xiàn)實(shí)意義[4,5]。基于西門(mén)子PLC S7-1200和堆垛機(jī)器人開(kāi)發(fā)一套立體倉(cāng)儲(chǔ)控制系統(tǒng),實(shí)現(xiàn)出入庫(kù)智能操作,并基于S7-1200驅(qū)動(dòng)伺服系統(tǒng)提出一種新型直線插補(bǔ)算法,最后通過(guò)工業(yè)以太網(wǎng)實(shí)現(xiàn)倉(cāng)庫(kù)與MES系統(tǒng)的遠(yuǎn)程通信,為智能車間打下基礎(chǔ)。
1 立體倉(cāng)庫(kù)總體設(shè)計(jì)
1.1 立體倉(cāng)庫(kù)機(jī)械結(jié)構(gòu)設(shè)計(jì)
小型立體倉(cāng)庫(kù)機(jī)械結(jié)構(gòu)主要由貨架、堆垛機(jī)器人、出入庫(kù)傳送帶和料盤(pán)組成,如圖1所示。
1)貨架:貨架由橫梁、立柱組合裝配構(gòu)成,實(shí)現(xiàn)模塊化安裝。
2)堆垛機(jī)器人:堆垛機(jī)器人是整個(gè)立體倉(cāng)庫(kù)的核心工作部分,是實(shí)現(xiàn)立體倉(cāng)庫(kù)出入庫(kù)的執(zhí)行機(jī)構(gòu)。堆垛機(jī)由X軸、Y軸、Z軸組成,能夠?qū)崿F(xiàn)沿X軸的水平移動(dòng)、沿Z軸的垂直移動(dòng)和沿Y軸的水平移動(dòng),如圖2所示。
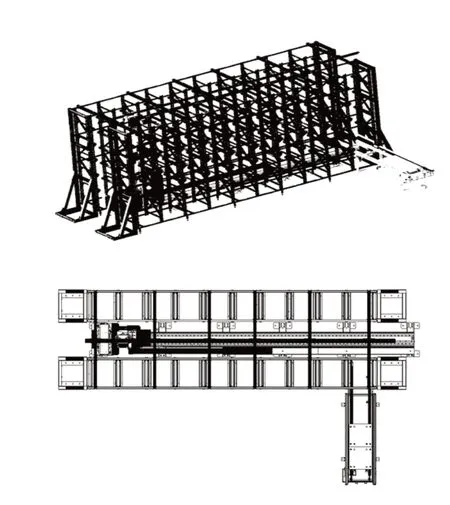
圖1 立體倉(cāng)庫(kù)示意圖
1.2 控制系統(tǒng)硬件結(jié)構(gòu)設(shè)計(jì)
電氣控制系統(tǒng)是堆垛機(jī)器人及出入庫(kù)傳送帶的控制中樞,是實(shí)現(xiàn)立體倉(cāng)庫(kù)出入庫(kù)動(dòng)作的核心單元。整個(gè)電氣控制硬件系統(tǒng)由PLC、輸入/輸出設(shè)備、執(zhí)行設(shè)備、驅(qū)動(dòng)裝置等組成。控制系統(tǒng)除了控制堆垛機(jī)和傳送帶的運(yùn)行,還需要控制各種限位開(kāi)關(guān)、行程開(kāi)關(guān)、感應(yīng)開(kāi)關(guān)以及觸摸屏等。控制柜元器件布置如圖3所示。
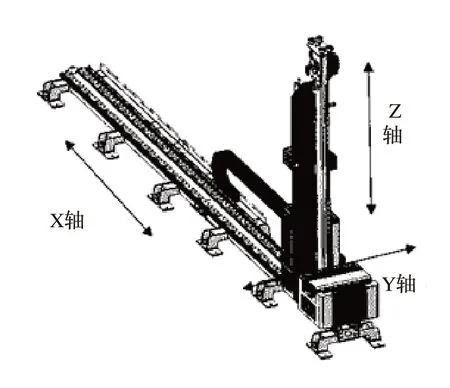
圖2 堆垛機(jī)示意圖
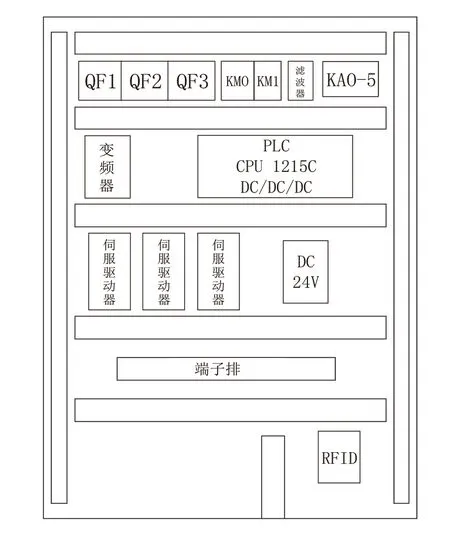
圖3 控制柜布置圖
2 控制系統(tǒng)功能實(shí)現(xiàn)
2.1 控制系統(tǒng)組態(tài)及IO配置
堆垛機(jī)的運(yùn)動(dòng)是由三個(gè)軸的運(yùn)動(dòng)實(shí)現(xiàn)的,對(duì)堆垛機(jī)運(yùn)動(dòng)的控制實(shí)際上是PLC對(duì)三個(gè)伺服驅(qū)動(dòng)器的控制來(lái)實(shí)現(xiàn)的。另外,輸入輸出傳送帶的運(yùn)動(dòng)是由PLC對(duì)變頻器的控制來(lái)實(shí)現(xiàn)的。基于S7-1200 PLC的硬件組態(tài)配置如圖4所示。
控制系統(tǒng)IO配置如表1所示。
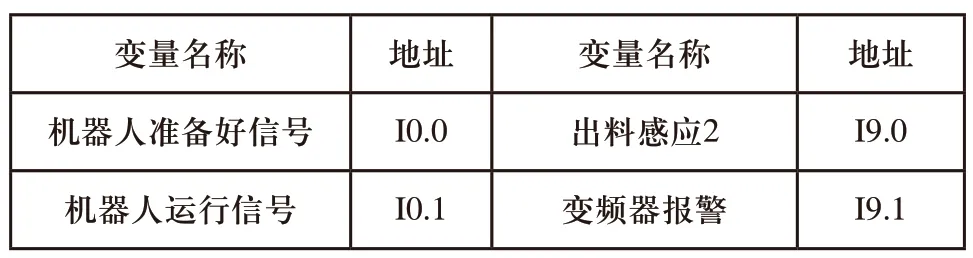
表1 I/O列表

圖4 系統(tǒng)硬件組態(tài)
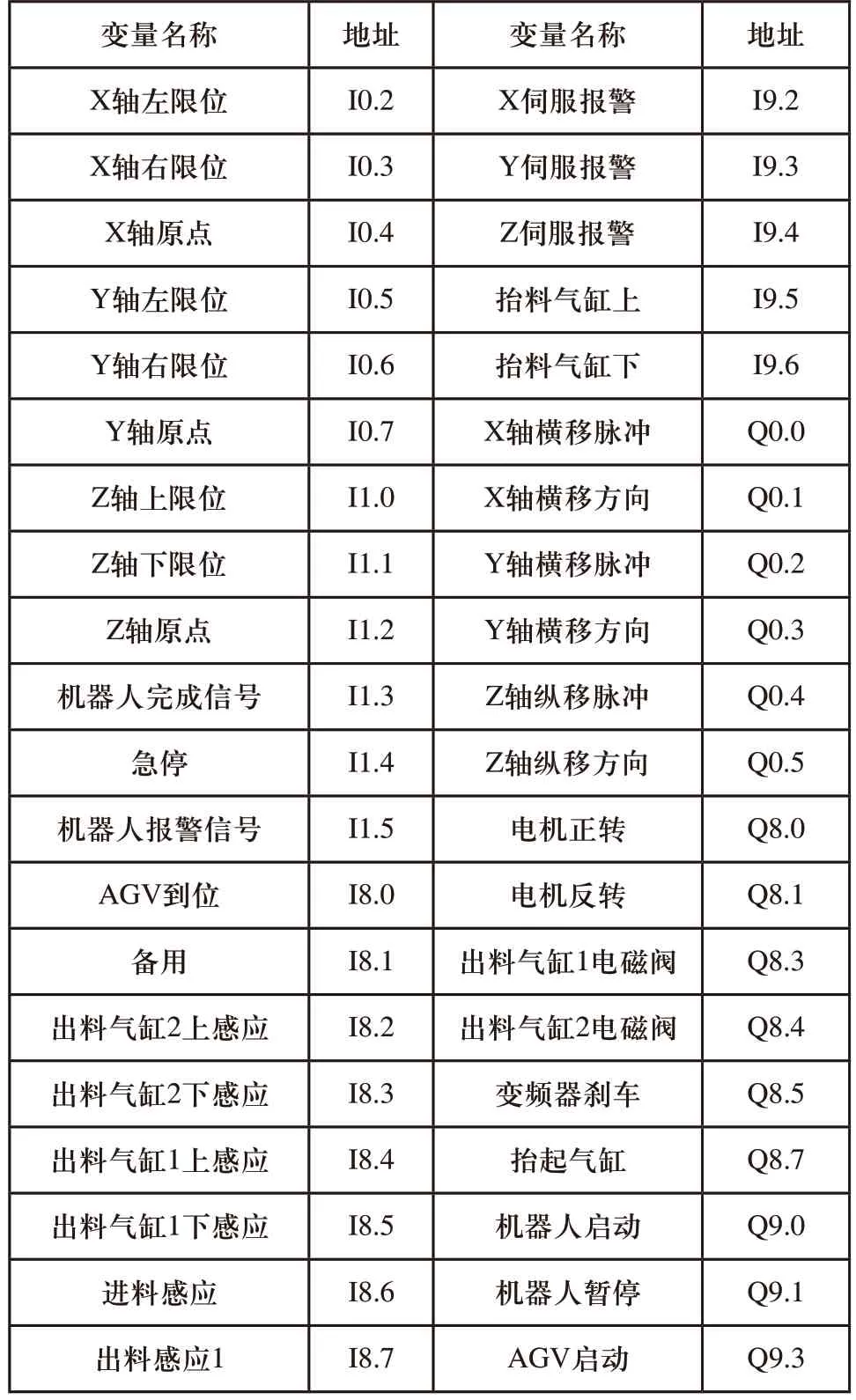
表1 (續(xù))
2.2 堆垛機(jī)器人步距計(jì)算
堆垛機(jī)X軸采用斜齒輪/齒條傳動(dòng),需要計(jì)算出齒輪與齒條嚙合時(shí),齒輪轉(zhuǎn)動(dòng)一圈行走的距離,計(jì)算過(guò)程如下:
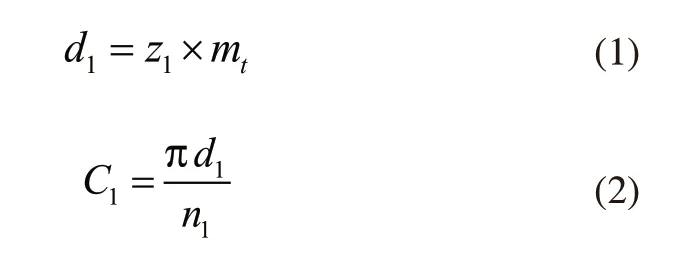
其中,已知齒數(shù)z1=25,端面模數(shù)mt=3,減速比n1=1:7,可計(jì)算出斜齒輪分度圓直徑d1(mm),分度圓周長(zhǎng)C1(mm),分度圓周長(zhǎng)即齒輪與齒條嚙合時(shí)齒輪轉(zhuǎn)動(dòng)一圈行走的距離。計(jì)算可得C1=33.659mm,同理可計(jì)算得C2=25.004mm,C3=25.492mm。
2.3 自動(dòng)認(rèn)址算法設(shè)計(jì)
自動(dòng)認(rèn)址是指用戶給定目標(biāo)貨位的行列數(shù)值后,堆垛機(jī)可以接收并識(shí)別貨位信息,然后自動(dòng)移動(dòng)至目標(biāo)位。此功能可分為兩個(gè)步驟,第一,堆垛機(jī)自動(dòng)識(shí)別目標(biāo)位置。第二,堆垛機(jī)精準(zhǔn)移動(dòng)到目標(biāo)位置。
本系統(tǒng)所設(shè)計(jì)的自動(dòng)化立體倉(cāng)庫(kù)貨架分為前后兩排,每一排有五行,十列,共94個(gè)貨位。絕對(duì)認(rèn)址算法算法分析如下:
首先需要計(jì)算出每個(gè)貨倉(cāng)之間的行間距和列間距,
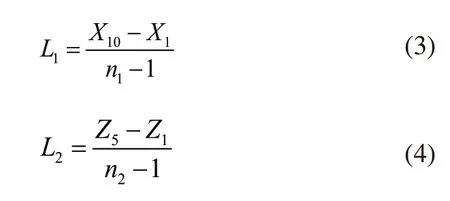
其中,X10第十列X軸坐標(biāo)5255.406(mm),X1第一列X軸坐標(biāo)-51.50407(mm),n1列數(shù)10列,計(jì)算可得X軸列間距L1=589.65667(mm)。Z5第五行Z軸坐標(biāo)1902.563(mm),Z1第一行Z軸坐標(biāo)93.13336(mm),n2行數(shù)5行,計(jì)算可得Z軸行間距L2=452.35741(mm)。接著計(jì)算出X軸、Z軸目標(biāo)行列數(shù)的具體坐標(biāo):
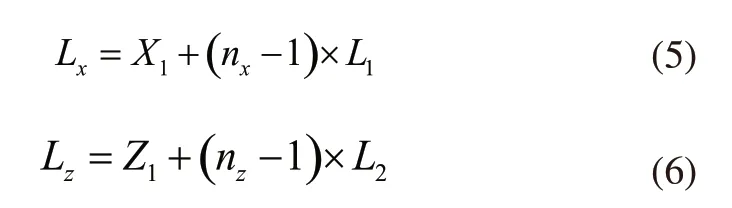
其中,X1第一列X軸坐標(biāo)-51.50407(mm),L1列間距589.65667(mm),nx目標(biāo)列數(shù),可計(jì)算出Lx目標(biāo)列數(shù)X軸坐標(biāo)。同理,可計(jì)算出Lz目標(biāo)行數(shù)Z軸坐標(biāo)。
計(jì)算完成后,給出X、Z軸運(yùn)行速度,通過(guò)絕對(duì)定位指令(MC_MoveAbsolute),控制軸運(yùn)動(dòng)到指定位置。
認(rèn)址算法示意圖如圖5所示。
2.4 直線插補(bǔ)算法設(shè)計(jì)
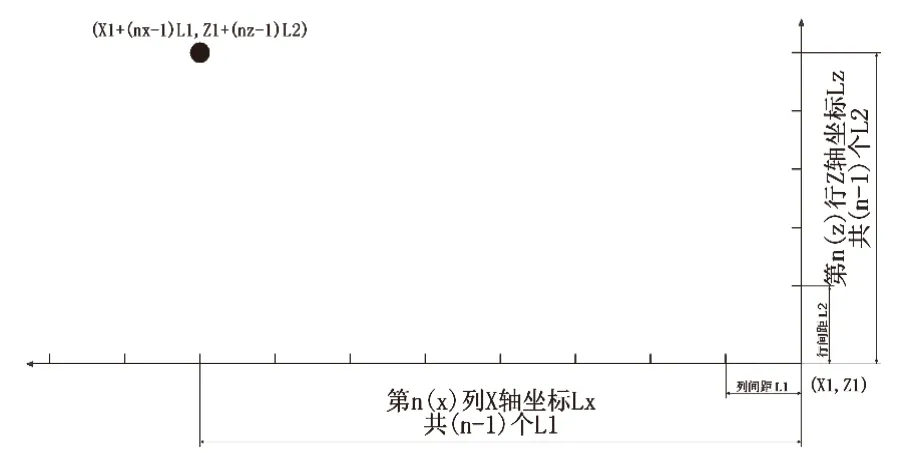
圖5 認(rèn)址算法示意圖
自動(dòng)化立體倉(cāng)庫(kù)體積龐大,倉(cāng)格數(shù)量多,目前大多數(shù)立體倉(cāng)庫(kù)沒(méi)有對(duì)堆垛機(jī)X軸、Z軸的運(yùn)行速度和路徑進(jìn)行優(yōu)化,這導(dǎo)致了出入庫(kù)的效率較低,嚴(yán)重影響了立體倉(cāng)庫(kù)的性能,所以可將數(shù)控系統(tǒng)中的直線插補(bǔ)思想應(yīng)用到立體倉(cāng)庫(kù)中,對(duì)運(yùn)行速度和路徑進(jìn)行優(yōu)化,提高立體倉(cāng)庫(kù)運(yùn)行效率。故本課題在實(shí)現(xiàn)X、Z軸自動(dòng)定位的基礎(chǔ)上,設(shè)計(jì)了一種新型直線插補(bǔ)算法,極大簡(jiǎn)化了程序結(jié)構(gòu),減少了運(yùn)算量。
設(shè)置X軸和Z軸的速度范圍,以X軸速度為基準(zhǔn),分別計(jì)算出X軸與Z軸的運(yùn)行距離,根據(jù)X軸速度和距離計(jì)算出X軸的運(yùn)行時(shí)間,將此時(shí)間設(shè)置為基準(zhǔn)時(shí)間,最后根據(jù)基準(zhǔn)時(shí)間和Z軸距離計(jì)算出Z軸速度。
具體算法如下:
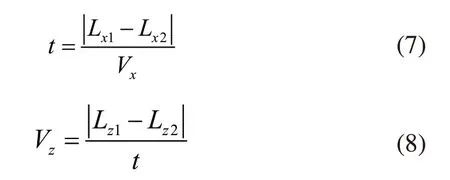
其中,t軸運(yùn)行時(shí)間(s),Lx1目標(biāo)列數(shù)坐標(biāo)值(mm),Lx2X軸當(dāng)前坐標(biāo)值(mm),VxX軸自動(dòng)運(yùn)行速度,Lz1目標(biāo)行數(shù)坐標(biāo)值(mm),Lz1Z軸當(dāng)前坐標(biāo)值(mm),可算得VzZ軸自動(dòng)運(yùn)行速度。最后將所得X、Z軸速度賦值給自動(dòng)定位模塊,控制兩軸以直線插補(bǔ)形式移動(dòng)到目標(biāo)位置。
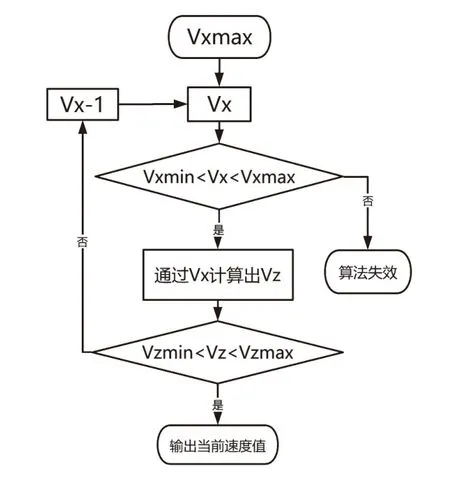
圖6 插補(bǔ)算法流程圖
2.5 組態(tài)監(jiān)控
本地監(jiān)控畫(huà)面包括初始畫(huà)面、自動(dòng)運(yùn)行畫(huà)面、手動(dòng)運(yùn)行畫(huà)面、參數(shù)配置畫(huà)面、IO監(jiān)控畫(huà)面,其中自動(dòng)運(yùn)行畫(huà)面如圖7所示。

圖7 自動(dòng)運(yùn)行監(jiān)控畫(huà)面
自動(dòng)運(yùn)行模式下,可以看到X、Y、Z軸當(dāng)前位置、速度、堆垛機(jī)目標(biāo)貨架行和列、出入庫(kù)情況。另外,該系統(tǒng)還可以實(shí)現(xiàn)與上位機(jī)通信,遠(yuǎn)程控制出入庫(kù)動(dòng)作,在此不再深入敘述。
3 結(jié)語(yǔ)
本文基于S7-1200,運(yùn)動(dòng)伺服驅(qū)動(dòng)技術(shù),設(shè)計(jì)了基于堆垛機(jī)的立體倉(cāng)庫(kù)控制系統(tǒng)。對(duì)立體倉(cāng)庫(kù)控制系統(tǒng)的硬件選型、組態(tài)配置、自動(dòng)認(rèn)址、直線插補(bǔ)、監(jiān)控等進(jìn)行了深入研究。實(shí)現(xiàn)了手動(dòng)運(yùn)行模式、自動(dòng)運(yùn)行模式及上位機(jī)遠(yuǎn)程模式下的出入庫(kù)操作。提出的直線插補(bǔ)算法優(yōu)化了出入庫(kù)路徑,有效地提高了立體倉(cāng)庫(kù)的出入庫(kù)效率。
