預制仰拱邊箱涵吊機設計及應用研究
2020-11-19 07:41:44章遠方
國防交通工程與技術 2020年6期
章遠方
(中鐵第五勘察設計院集團有限公司,北京 102600)
1 工程概況
仰拱施工通常采用現澆方法進行施工。在隧道掌子面施工的同時,后方一般采用仰拱模板臺車配合施工,盡早使隧道形成閉環結構,達到“早封閉”原則[1-2]。目前,在國內鐵路隧道施工中,仰拱一般采用現澆方案,存在工序繁雜、施工效率低、施工質量難以保證等問題。為保證隧道內混凝土施工質量,提高隧道使用壽命,工廠化預制、現場裝配成為主要手段之一。國內外科研工作者對隧道內預制拼裝技術進行了大量研究[3-7]。
清華園隧道是國內第一座采用仰拱預制拼裝技術的大直徑高鐵盾構隧道,是北京地區直徑最大的盾構隧道,盾構隧道內徑11.1 m,外徑12.2 m[8-9]。隧道仰拱不再采用現澆方式進行施工,而是將仰拱分成兩種箱涵結構(中箱涵和邊箱涵),兩種箱涵采用螺栓進行連接,通過澆筑混凝土使箱涵結構和隧道管片形成一個整體。箱涵結構全部采用工廠預制,在盾構掘進過程中,中箱涵作為物料通道,必須跟隨管片掘進進行施工。邊箱涵與中箱涵不能同時施工,因此,研發了一種隧道邊箱涵預制拼裝設備。邊箱涵吊機起重小車上安裝有4臺電動葫蘆,負責邊箱涵的吊運,同時完成邊箱涵吊裝工作。4個電動葫蘆可以同時起升,也可以分開單個起升,單動能夠將吊具及邊箱涵調整姿態,適應于多種拼裝工況,實現邊箱涵的快速自動拼裝,降低邊箱涵施工風險,能夠大大提高施工效率。
2 預制仰拱邊箱涵施工
2.1 隧道仰拱預制箱涵
清華園盾構隧道預制仰拱塊分為3部分,分別是中箱涵,兩側邊箱涵,如圖1所示。中箱涵由盾構機進行鋪設,邊箱涵采用運輸車運輸至安裝位置,由邊箱涵吊機進行吊運和對位安裝[10-13]。邊箱涵自重約11.5 t,其尺寸見圖2所示。
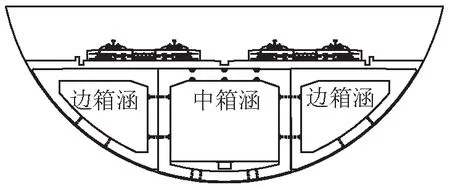
圖1 隧道預制仰拱斷面布置圖
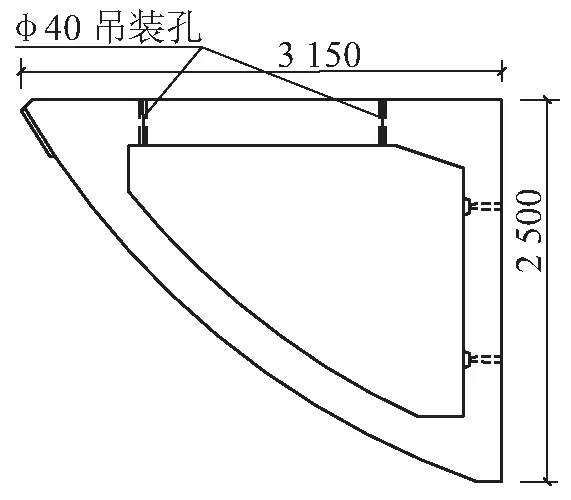
圖2 邊箱涵尺寸圖(單位:mm)
2.2 仰拱箱涵施工技術
中箱涵在盾構施工過程中,盾構機后配套箱涵吊機完成中箱涵的鋪設,在盾構掘進過程中,中箱涵作為物料通道,必須跟隨管片掘進進行施工。邊箱涵與中箱涵不能同時施工,應該錯開一個施工循環。中箱涵通過螺栓連接到管片上,邊箱涵與中箱涵、管片通過螺栓連接,從而三部分形成一個整體。
3 預制仰拱邊箱涵吊機設計與應用
為實現盾構機后方邊箱涵快速對位安裝、提高仰拱施工效率,研究一種適應隧道內高低錯位行走方式的邊箱涵吊機。邊箱涵吊機設計關鍵技術主要包括:高低腿結構形式、高腿弧面走行系統、四點起吊調節邊箱涵姿態和U型吊具結構等。
3.1 邊箱涵吊機結構組成
邊箱涵吊機主要由主結構、起重小車、可旋轉U型吊具、走行系統和箱涵件調整定位機構等組成。邊箱涵吊機三維效果圖見圖3所示。
3.1.1 主結構
主結構采用一高一低支腿形式,前支腿采用折彎結構,以適應隧道弧面行走工況,同時在前支腿上設置導向輪,以中箱涵作為參考,保證箱涵吊機走行對中。后支腿走行在已鋪設完成的邊箱涵上。該走行機構能夠適應隧道弧面走行工況,保證箱涵吊機走行對中,并且不會發生前傾危險。當防走空輪處于無支撐狀態時,整機會立即斷電,使行走處于無動力狀態。
3.1.2 起重小車
起重小車采用四點起吊方式,每個電葫蘆吊鉤和下部吊具旋轉吊架連接。起重小車走行系統通過掛輪掛在工字梁上,通過齒輪、齒條驅動實現左右移動。起重小車上安裝有4個5 t電動葫蘆,負責邊箱涵吊運工作,見圖4所示。4個電動葫蘆可以同時起升,也可以分開單個起升。
3.1.3 可旋轉U型吊具
可旋轉U型吊具包含上部旋轉吊架和下部U形架,見圖5所示。U型架能夠旋轉90°,旋轉到位后自動停止,實現側箱涵和中箱涵的對位安裝。吊具吊住邊箱涵后,能夠自動加緊。吊具起升過程中,起吊高度超高后系統自動防止沖頂。
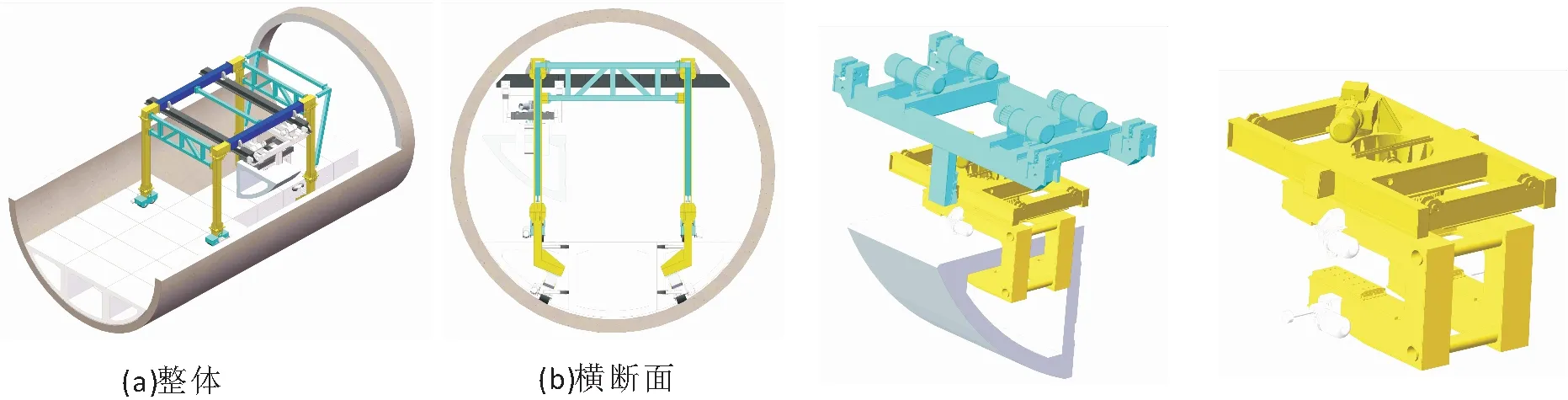
圖3 邊箱涵吊機三維效果圖 圖4 起重小車布置圖 圖5 可旋轉U型吊具
3.1.4 走行系統
走行系統采用無軌行走,四驅動力,保證運行平穩,前走行系統行走在管片上,能夠完美貼合管片弧度,結構受力合理,行走過程運行平穩。后走行系統行走在拼裝后的邊箱涵,安裝有防落空裝置,避免人員操作失誤導致后腿落空。
3.2 邊箱涵吊機主要技術參數
起重量12 t(不含吊具),吊具3.5 t;吊運系統起升速度0~7 m/min;小車行走速度0~10 m/min;大車行走速度0~10 m/min;行走輪中心距5.6 m。
3.3 邊箱涵吊機結構有限元計算
為保證邊箱涵吊機結構要求,對邊箱涵吊機主結構進行有限元分析。采用有限元軟件MIDAS/Civil對邊箱涵吊機主結構進行有限元分析,邊箱涵吊機主結構有限元模型見圖6所示。
由于實際有效懸臂長度只有165 mm,其懸臂變形可忽略不計,所以結構計算時,只考慮邊箱涵吊機在跨中起吊時工況。變形和應力云圖見圖7、圖8所示。跨度中央垂直撓度為f=4.3 mm<5 600/1 000 mm=5.6 mm,σ=44.7 MPa<[σ]=235/1.5 MPa=156 MPa。所以,邊箱涵吊機結構變形和受力滿足規范要求,能夠滿足施工安全要求。
3.4 邊箱涵吊機現場應用
邊箱涵吊機在隧道內工作狀態見圖9所示。在施工中,由于吊具和隧道內管線存在一定干涉,見圖10所示。在施工時,將吊具拆除,見圖11所示。通過在邊箱涵表面的吊孔安裝吊耳,實現箱涵的對位安裝。從實際施工看,邊箱涵吊機吊具后期需要優化設計,避免和隧道內管線發生干涉。

圖6 邊箱涵吊機主結構有限元模型 圖7 邊箱涵吊機主結構變形云圖 圖8 邊箱涵吊機主結構應力云圖
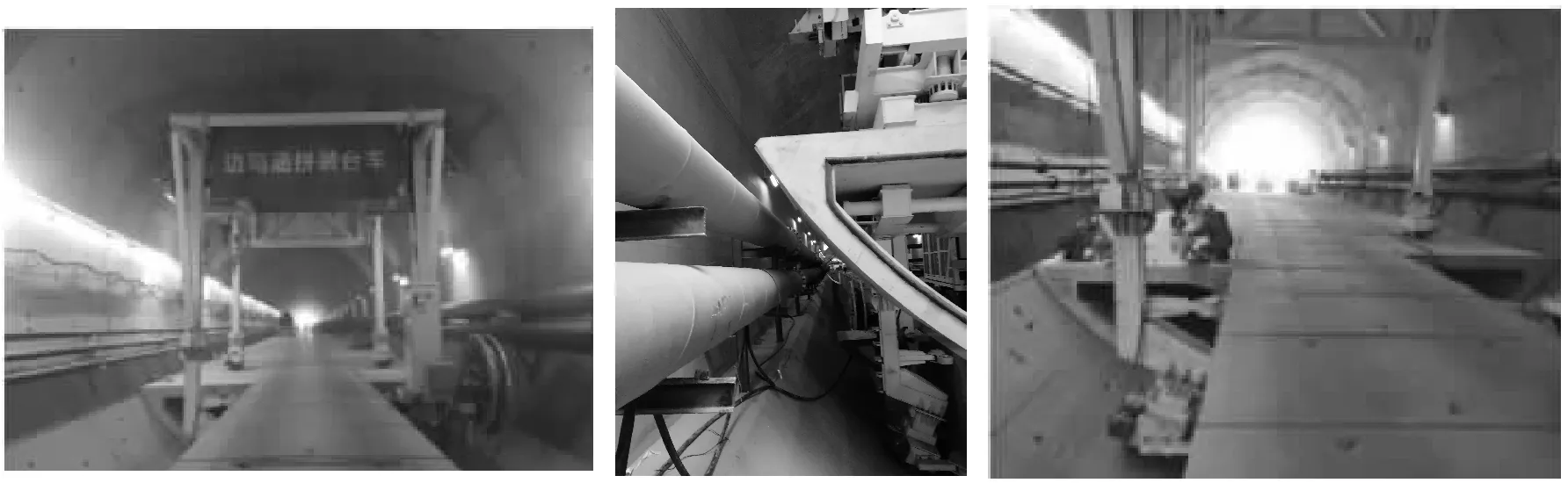
圖9 邊箱涵吊機工作狀態 圖10 邊箱涵對位安裝時干涉情況 圖11 邊箱涵對位安裝
由于設計中,未考慮“四點起吊,三點平衡”,很容易造成電葫蘆超載嚴重作業等危險工況,所以對旋轉吊架進行了優化設計,見圖12所示。在U形吊具上部旋轉吊架一側支撐梁設計一根均衡軸,使一側行成兩點單獨起吊、一側兩點同時起吊,從而使起吊系統行程“四點起吊,三點平衡”。
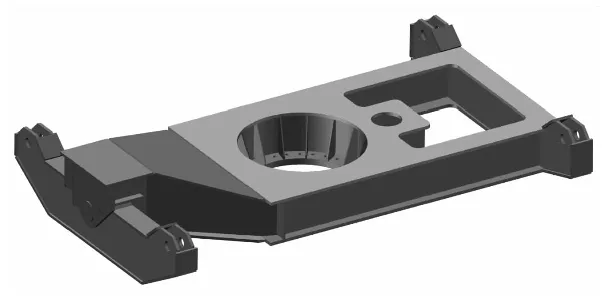
圖12 旋轉吊架結構優化設計
4 邊箱涵吊機的應用
(1)走行輪系采用橡膠大直徑輪胎,承載能力大。橡膠大直徑輪胎行進過程中運行平穩,能夠順利越過管片或箱涵件的錯臺,環境適應性強。行走輪系采用四驅大扭矩驅動系統,同時驅動系統全部加變頻器進行調速,以確保啟動和走行平穩。同時驅動系統具有電磁制動功能,能夠實現行走輪系的穩定可靠制動。
(2)邊箱涵吊機行走功率滿足隧道內30‰坡度施工要求。
(3)邊箱涵吊機行走輪系具有微動轉向,適用于隧道彎曲施工環境。
(4)邊箱涵吊機前輪設計有側向定位裝置,保證邊箱涵吊機位置保持在隧道中心。
(5)邊箱涵吊機行走輪可快速調整,實現轉換至平面行走的要求。
5 結束語
京張高鐵清華園隧道仰拱采用預制拼裝技術,能夠有效地在復雜盾構隧道環境下實現快速施工的要求,避免了在盾構機后方大量現澆混凝土產生的環境污染。采用邊箱涵吊機進行箱涵的吊運和安裝,能夠有效地提高邊箱涵和中箱涵的安裝精度,同時邊箱涵吊機下方可通過物流車,不會對其他物料運輸發生干涉。
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年9期)2021-07-16 07:11:36
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
現代企業(2015年9期)2015-02-28 18:56:50