面向卡塞格倫傘狀天線的主副面同步展開(kāi)機(jī)構(gòu)設(shè)計(jì)及分析
2020-11-24 03:34:24韓曉童王曉凱邢永濤張樹(shù)新
上海航天 2020年5期
韓曉童,王曉凱,邢永濤,張樹(shù)新
(1.西安電子科技大學(xué)電子裝備結(jié)構(gòu)設(shè)計(jì)教育部重點(diǎn)實(shí)驗(yàn)室,陜西 西安 710071;2.上海宇航系統(tǒng)工程研究所,上海 201109)
0 引言
目前發(fā)展較為成熟的星載可展開(kāi)天線,例如固面式[1]、充氣式[2]、構(gòu)架式[3-4]及周邊桁架式[5-7]等,都難以同時(shí)滿足高收納比、高精度的要求。而傘狀可展開(kāi)天線[8-11]在收納比、面密度、展開(kāi)性能以及在軌熱環(huán)境下的形面保持等方面,具有突出的優(yōu)勢(shì),受到了眾多國(guó)際宇航研究機(jī)構(gòu)的高度關(guān)注和廣泛研究。
傘狀天線又稱為支撐肋可展開(kāi)天線,是指柔性反射面由肋支撐,收攏時(shí)支撐肋收攏,在軌后支撐肋展開(kāi)帶動(dòng)柔性反射面展開(kāi)到工作狀態(tài)的可展開(kāi)式天線。傘狀天線的分類(lèi)主要根據(jù)支撐肋的不同進(jìn)行分類(lèi),可分為纏繞肋天線[12]、徑向剛性肋天線[13]和可收攏肋[14]天線。纏繞肋天線結(jié)構(gòu)簡(jiǎn)單,收納比高,可以研制出超過(guò)30 m 的單一模塊天線,但其剛度、抗振性、反射面精度都比較差。徑向肋天線最早由美國(guó)TRW 公司研制,具有高精度及高剛度,可收攏肋天線收攏時(shí)不僅各條肋可以進(jìn)行收攏,每條肋也可進(jìn)行自身的收攏。
美國(guó)噴氣推進(jìn)實(shí)驗(yàn)室(JPL)Chahat 等[15-16]公開(kāi)了一種小型傘狀可展開(kāi)天線的原理樣機(jī)的展開(kāi)過(guò)程,該傘狀天線在氣體推動(dòng)的作用下天線開(kāi)始進(jìn)行展開(kāi),天線主反射面和副反射面主要通過(guò)彈簧進(jìn)行展開(kāi),每一根天線肋通過(guò)各自的恒力彈簧和彈簧片聯(lián)合作用完成天線尖肋的展開(kāi)。該傘狀可展開(kāi)天線具有三次較大沖擊,分別是氣體推動(dòng)瞬間、副面完全展開(kāi)瞬間和天線肋完全展開(kāi)瞬間,且天線展開(kāi)同步性較差。
之后Chahat 等[17-18]對(duì)展開(kāi)機(jī)構(gòu)進(jìn)行改進(jìn),將氣體推進(jìn)的展開(kāi)方式改為以絲杠螺母機(jī)構(gòu)作為推進(jìn)機(jī)構(gòu),增加了輪轂底座展開(kāi)時(shí)的穩(wěn)定性,但是依然存在天線肋展開(kāi)時(shí)同步性較差、存在兩次較大沖擊等問(wèn)題。我國(guó)發(fā)射的“鵲橋”[19-21]傘狀可展開(kāi)天線,采用緩釋彈簧分布式驅(qū)動(dòng)展開(kāi)技術(shù)實(shí)現(xiàn)天線在軌展開(kāi)功能,機(jī)構(gòu)內(nèi)部分為兩個(gè)模塊,分別為動(dòng)力模塊和傳動(dòng)模塊。緩釋彈簧分布式驅(qū)動(dòng)展開(kāi)技術(shù)采用動(dòng)力多點(diǎn)布局,展開(kāi)過(guò)程中保證所有動(dòng)力源輸出動(dòng)力和速度的一致性,最大限度地降低了由于單點(diǎn)失效帶來(lái)的可靠性下降問(wèn)題和天線展開(kāi)速度控制問(wèn)題。但對(duì)于長(zhǎng)焦距卡塞格倫式天線,該展開(kāi)機(jī)構(gòu)收攏后結(jié)構(gòu)不夠緊湊。
展開(kāi)過(guò)程是可展天線最容易出現(xiàn)故障的環(huán)節(jié)之一,天線展開(kāi)過(guò)程不穩(wěn)定,容易產(chǎn)生過(guò)大的沖擊,造成展開(kāi)過(guò)程的失敗。因此,在設(shè)計(jì)階段,對(duì)天線的展開(kāi)過(guò)程仿真來(lái)預(yù)測(cè)展開(kāi)性能是十分重要的。針對(duì)長(zhǎng)焦距卡塞格倫式天線結(jié)構(gòu)特征,本文提出了一種基于曲柄滑塊與繩索機(jī)構(gòu)相結(jié)合的傘狀天線展開(kāi)機(jī)構(gòu),對(duì)主副面展開(kāi)過(guò)程進(jìn)行速度規(guī)劃和仿真分析,確定最優(yōu)速度規(guī)劃,驗(yàn)證展開(kāi)過(guò)程滿足穩(wěn)定的要求。
1 傘狀天線展開(kāi)機(jī)構(gòu)總體設(shè)計(jì)
1.1 設(shè)計(jì)依據(jù)
星載可展開(kāi)天線機(jī)構(gòu)設(shè)計(jì)的目的是使其具有收攏體積小、展開(kāi)過(guò)程穩(wěn)定等特點(diǎn)。針對(duì)長(zhǎng)焦距卡塞格倫天線的結(jié)構(gòu)特點(diǎn),為滿足收攏后結(jié)構(gòu)更加緊湊,展開(kāi)時(shí)需要進(jìn)行副面和主面的兩次展開(kāi)。對(duì)于現(xiàn)有副面需要展開(kāi)的卡塞格倫式傘狀可展開(kāi)天線,為副面與主面每條肋各自進(jìn)行展開(kāi),展開(kāi)方式為彈簧、扭簧驅(qū)動(dòng)展開(kāi),展開(kāi)過(guò)程沖擊較大。當(dāng)要求主面與副面同時(shí)展開(kāi)時(shí),只需要一個(gè)驅(qū)動(dòng),因此,可通過(guò)副面的展開(kāi)來(lái)驅(qū)動(dòng)主面的展開(kāi)。而副面展開(kāi)時(shí)為直線運(yùn)動(dòng),主面展開(kāi)時(shí)為旋轉(zhuǎn)運(yùn)動(dòng),因此,需實(shí)現(xiàn)主面展開(kāi)時(shí)直線運(yùn)動(dòng)到旋轉(zhuǎn)運(yùn)動(dòng)的轉(zhuǎn)換。當(dāng)曲柄滑塊機(jī)構(gòu)以滑塊為主動(dòng)件時(shí),能夠?qū)崿F(xiàn)直線運(yùn)動(dòng)到旋轉(zhuǎn)運(yùn)動(dòng)的轉(zhuǎn)換。
在類(lèi)似曲柄滑塊機(jī)構(gòu)的作用下,主面單根天線肋的展開(kāi)過(guò)程運(yùn)動(dòng)簡(jiǎn)圖如圖1 所示。圖中:O點(diǎn)表示天線肋轉(zhuǎn)動(dòng)鉸鏈中心;A點(diǎn)表示連桿與天線肋鉸接中心;B點(diǎn)表示連桿與滑塊鉸接中心;C點(diǎn)表示天線肋頂點(diǎn)。天線展開(kāi)時(shí),副反射面需向上運(yùn)動(dòng),而滑塊需向下移動(dòng)完成主面的展開(kāi),因此,可通過(guò)繩索和定滑輪的作用,實(shí)現(xiàn)天線展開(kāi)時(shí)副反射面對(duì)滑塊的反向拉動(dòng)。

圖1 天線單根肋展開(kāi)過(guò)程運(yùn)動(dòng)簡(jiǎn)圖Fig.1 Schematic diagram of the antenna single rib deployment process
1.2 展開(kāi)機(jī)構(gòu)設(shè)計(jì)
天線完全展開(kāi)態(tài)剖面示意圖如圖2 所示。天線展開(kāi)機(jī)構(gòu)主要由底座、天線肋、連桿、滑塊、繩索機(jī)構(gòu)和副反射面組成,其中繩索機(jī)構(gòu)包含繩索與定滑輪。天線收攏時(shí),副面高度近似于天線肋高度。天線在展開(kāi)時(shí),主動(dòng)件為副反射面。天線的副反射面上升時(shí),通過(guò)繩索機(jī)構(gòu)的作用,繩索拉動(dòng)滑塊向下運(yùn)動(dòng),再通過(guò)連桿傳遞力的作用,使天線肋進(jìn)行展開(kāi)。副面到達(dá)固定位置后,天線完全展開(kāi),實(shí)現(xiàn)了天線副反射面與主反射面的同步展開(kāi)。天線副反射面完全展開(kāi)后,繩索具有一定的彈性,能夠?qū)崿F(xiàn)天線形態(tài)的保持。

圖2 天線完全展開(kāi)態(tài)剖面示意圖Fig.2 Profile diagram of the fully deployed antenna
本文設(shè)計(jì)的展開(kāi)機(jī)構(gòu)應(yīng)用于卡塞格倫雙反射面天線,得到天線完全展開(kāi)時(shí)的整體三維實(shí)體模型圖,如圖3 所示。
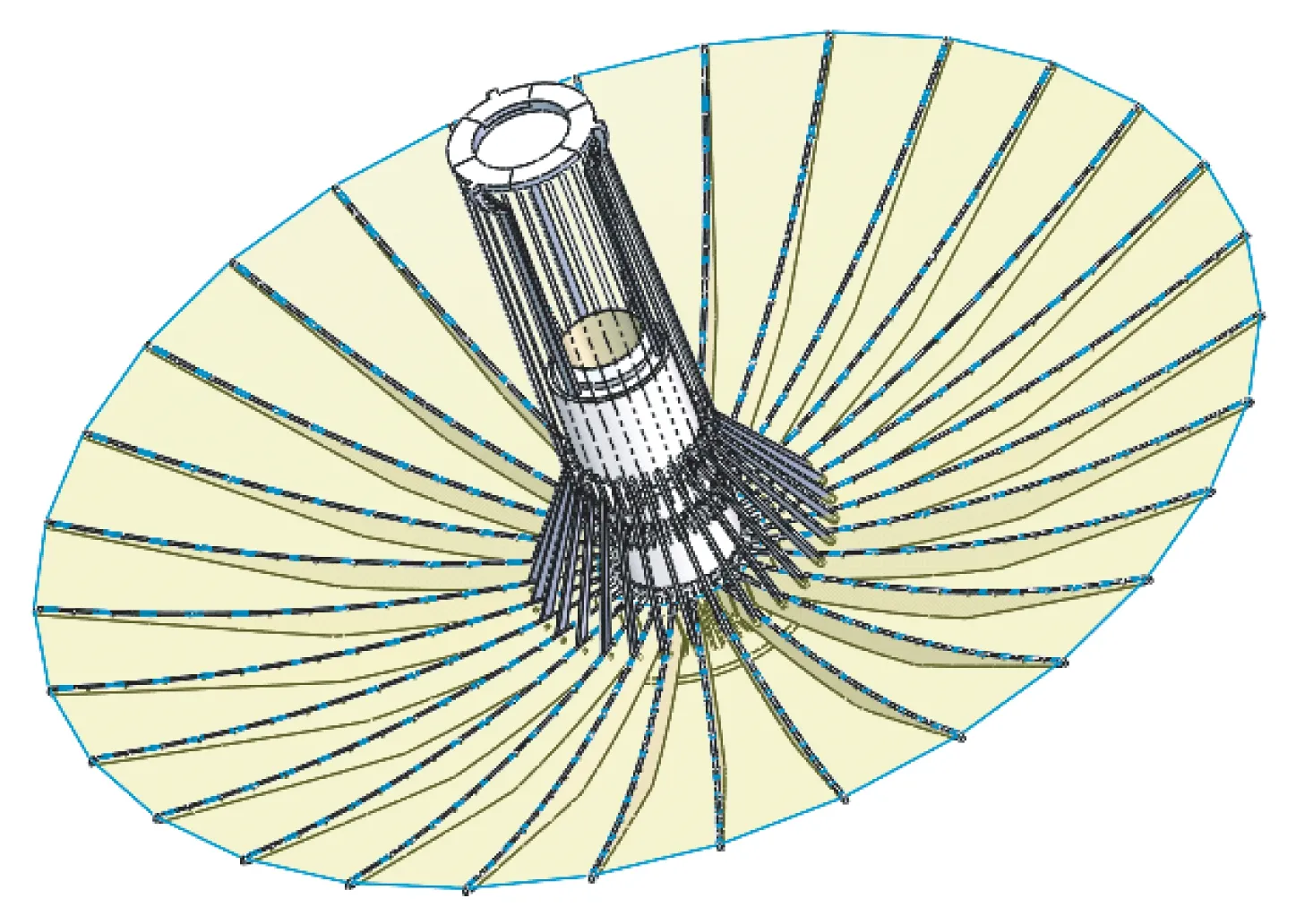
圖3 傘狀天線完全展開(kāi)態(tài)三維實(shí)體模型圖Fig.3 Three-dimensional entity model of the fully deployed umbrella-type antenna
2 傘狀天線展開(kāi)過(guò)程分析
2.1 位置分析
將天線單根肋的展開(kāi)過(guò)程運(yùn)動(dòng)簡(jiǎn)圖在坐標(biāo)系中表示,天線展開(kāi)機(jī)構(gòu)各部件間的位置及角度關(guān)系如圖4 所示。圖中:O、A、B、C代表的點(diǎn)與圖3 相同;θ表示天線肋展開(kāi)時(shí)角度;β表示AC連接線與OA延長(zhǎng)線夾角;r表示滑塊運(yùn)動(dòng)在y方向位置。

圖4 坐標(biāo)系中單根肋展開(kāi)機(jī)構(gòu)運(yùn)動(dòng)簡(jiǎn)圖Fig.4 Kinematic sketch of the single rib deployment mechanism in the coordinate system
B、C點(diǎn)的坐標(biāo)為

式中:xB為B點(diǎn)在x方向的坐標(biāo);yB為B點(diǎn)在y方向的坐標(biāo);xC為C點(diǎn)x方向的坐標(biāo);yC為C點(diǎn) 在y方向的坐標(biāo);lOA為O、A點(diǎn)連接線的長(zhǎng)度;lAC為A、C點(diǎn)連接線的長(zhǎng)度;β為定值;滑塊的運(yùn)動(dòng)為y方向上下滑動(dòng);改變?chǔ)龋傻玫教炀€肋頂點(diǎn)的運(yùn)動(dòng)軌跡。
2.2 展開(kāi)速度和加速度分析
展開(kāi)角度θ與滑塊位置r的關(guān)系方程為

式中:lAB為A、B點(diǎn)連接線的長(zhǎng)度。
以滑塊位置r為自變量,建立展開(kāi)角度θ與滑塊位置r的關(guān)系為

式(4)兩端同時(shí)對(duì)時(shí)間t求一階導(dǎo),得到展開(kāi)角速度與滑塊速度之間的變換方程為

式(5)對(duì)時(shí)間t求一次導(dǎo),得到展開(kāi)角加速度與滑塊加速度之間的變換方程為

滑塊位置r隨時(shí)間t的變化函數(shù)為

式中:f(t)為規(guī)劃滑塊運(yùn)動(dòng)的速度的變化規(guī)律;C1為保證函數(shù)連續(xù)性而待確定的量。
這樣就從機(jī)構(gòu)運(yùn)動(dòng)學(xué)的角度,得出了天線在整個(gè)展開(kāi)過(guò)程中天線展開(kāi)角度θ、角速度、角加速度與每一個(gè)展開(kāi)時(shí)刻t的對(duì)應(yīng)關(guān)系。
2.3 滑塊速度規(guī)劃
天線展開(kāi)過(guò)程是否平穩(wěn),直接影響展開(kāi)過(guò)程是否會(huì)出現(xiàn)大的振動(dòng)。因此,有必要對(duì)傘狀天線的展開(kāi)過(guò)程進(jìn)行運(yùn)動(dòng)規(guī)劃。為了使副面展開(kāi)時(shí)更加平穩(wěn),對(duì)比滑塊在不同速度下天線肋展開(kāi)時(shí)的穩(wěn)定性,為減小最大角速度和角加速度,對(duì)滑塊分別進(jìn)行勻速[22]、勻加速勻減速[23]、三次多項(xiàng)式[24]、五次多項(xiàng)式[25]和正弦函數(shù)[26]的速度規(guī)劃。
滑塊以勻加速勻減速運(yùn)動(dòng)時(shí),滑塊速度規(guī)劃滿足如下函數(shù)

滑塊運(yùn)動(dòng)滿足關(guān)系式

式中:H為滑塊運(yùn)動(dòng)的總行程。
滑塊速度以三次多項(xiàng)式變化時(shí),三次多項(xiàng)式函數(shù)定義為


式中:x3為自變量;x30為階躍函數(shù)起點(diǎn)自變量的值;h30為階躍起點(diǎn)處函數(shù)值;x31為階躍函數(shù)終點(diǎn)自變量值;h31為階躍終點(diǎn)函數(shù)值。
滑塊以三次多項(xiàng)式規(guī)劃運(yùn)動(dòng)時(shí)滿足函數(shù)

滑塊運(yùn)動(dòng)總行程H滿足關(guān)系式

滑塊以五次多項(xiàng)式運(yùn)動(dòng)時(shí),五次多項(xiàng)式函數(shù)定義為

式中:x5為自變量;x50為階躍函數(shù)起點(diǎn)自變量的值;h50為階躍起點(diǎn)處函數(shù)值;x51為階躍函數(shù)終點(diǎn)自變量值;h51為階躍終點(diǎn)函數(shù)值。
滑塊以五次多項(xiàng)式規(guī)劃運(yùn)動(dòng)時(shí)函數(shù)滿足

滑塊運(yùn)動(dòng)總行程H滿足關(guān)系式

滑塊速度以正弦函數(shù)規(guī)劃運(yùn)動(dòng)時(shí)滿足函數(shù)

滑塊運(yùn)動(dòng)總行程H滿足關(guān)系式

滑塊速度分別按照勻速、勻加速勻減速、三次多項(xiàng)式、五次多項(xiàng)式和正弦函數(shù)進(jìn)行速度規(guī)劃時(shí)滑塊的速度變化曲線,分別如圖5(a)~圖5(e)所示。

圖5 滑塊速度變化曲線Fig.5 Slider velocity curves
3 實(shí)例仿真
3.1 運(yùn)動(dòng)學(xué)仿真
傘狀可展開(kāi)天線為完全對(duì)稱結(jié)構(gòu),每一根肋的展開(kāi)機(jī)構(gòu)完全相同,選取一根肋對(duì)其進(jìn)行運(yùn)動(dòng)仿真研究。已知lOA=34.33 mm,lAB=69.38 mm;r0為滑塊在初始狀態(tài)時(shí)y方向坐標(biāo),值為101.68;設(shè)滑塊從完全收攏態(tài)到完全展開(kāi)態(tài)總行程H為43.7 mm,為初速度,值為0,展開(kāi)總用時(shí)T為10 s。
滑塊以勻速運(yùn)動(dòng)時(shí)滑塊行程的變化滿足關(guān)系式

式中:r1為滑塊以勻速運(yùn)動(dòng)時(shí)行程的變化;為滑塊以勻速運(yùn)動(dòng)時(shí)速度大小;C0為保證函數(shù)連續(xù)性而待確定的量。代入數(shù)據(jù)可得,C0=r0=101.67。將式(18)代入到式(5)和式(6),可得到天線肋展開(kāi)時(shí)角速度和角加速度隨時(shí)間t的變化規(guī)律。
滑塊以勻加速-勻速-勻減速運(yùn)動(dòng)時(shí),代入數(shù)據(jù)到式(8)和式(9),可得。對(duì)式(8)積分可得每個(gè)時(shí)間段內(nèi)滑塊行程的變化為

式中:r2為滑塊以勻加速-勻速-勻減速運(yùn)動(dòng)時(shí)滑塊行程的變化;C1、C2、C3為保證函數(shù)連續(xù)性而待確定的量,代入數(shù)據(jù)可得C1=101.67,C2=106.96,C3=194.35。將式(19)代入到式(5)和式(6),可得勻加速勻減速速度規(guī)劃下,天線肋展開(kāi)時(shí)角速度和角加速度隨時(shí)間t的變化規(guī)律。
滑塊以三次多項(xiàng)式的速度規(guī)劃運(yùn)動(dòng)時(shí),代入數(shù)據(jù)到式(10)~式(12),可得=-43.7/8。對(duì)式(11)積分可得每個(gè)時(shí)間段內(nèi)滑塊行程的變化為

式中:r3為滑塊以三次多項(xiàng)式的速度規(guī)劃運(yùn)動(dòng)時(shí)滑塊行程的變化;C31、C32、C33為保證函數(shù)連續(xù)性而待確定的量,代入數(shù)據(jù)可得C31=101.67,C32=107.21,C33=-1 990.50。將式(20)代入到式(5)和式(6),可得三次多項(xiàng)式速度規(guī)劃下,天線肋展開(kāi)時(shí)角速度和角加速度隨時(shí)間t的變化規(guī)律。
滑塊以五次多項(xiàng)式的速度規(guī)劃運(yùn)動(dòng)時(shí),代入數(shù)據(jù)到式(13)~式(15),可得。對(duì)式(14)積分可得每個(gè)時(shí)間段內(nèi)滑塊行程的變化為

式中:r5為滑塊以五次多項(xiàng)式的速度規(guī)劃運(yùn)動(dòng)時(shí)滑塊行程的變化;C51、C52、C53為保證 函數(shù)連續(xù)性而待確定的量,代入數(shù)據(jù)可得C51=101.67,C52=107.13,C53=85 409.50。
將式(21)代入到式(5)和式(6),可得五次多項(xiàng)式速度規(guī)劃下,天線肋展開(kāi)時(shí)角速度和角加速度隨時(shí)間t的變化規(guī)律。
滑塊以正弦函數(shù)的速度規(guī)劃運(yùn)動(dòng)時(shí),代入數(shù)據(jù)到式(16)~式(17),可得。對(duì)式(16)積分可得每個(gè)時(shí)間段內(nèi)滑塊行程的變化為

式中:rsin為滑塊以正弦函數(shù)的速度規(guī)劃運(yùn)動(dòng)時(shí)滑塊行程的變化;Cs1、Cs2、Cs3為保證函數(shù)連續(xù)性而待確定的量,代入數(shù)據(jù)可得Cs1=95.16,Cs2=105.39,Cs3=64.48。將式(22)代入到式(5)和式(6),可得正弦函數(shù)速度規(guī)劃下,天線肋展開(kāi)時(shí)角速度和角加速度隨時(shí)間t的變化規(guī)律。
滑塊速度分別按照勻速(uniform velocity)、勻加速勻減速(uniform acceleration)、三次多項(xiàng)式(cubic polynomial)、五次多項(xiàng)式(quantic polynimial)和正弦函數(shù)(sine funcation)進(jìn)行速度規(guī)劃時(shí),得到的滑塊速度變化曲線如圖6(a)所示,滑塊加速度變化曲線如圖6(b)所示。
在不同速度規(guī)劃下進(jìn)行天線肋的展開(kāi)過(guò)程仿真,為驗(yàn)證仿真可靠性,對(duì)天線肋的展開(kāi)過(guò)程分別進(jìn)行Matlab 數(shù)值仿真與ADAMS 軟件仿真。ADAMS 軟件仿真時(shí),將簡(jiǎn)化的三維實(shí)體模型導(dǎo)入到多體系統(tǒng)動(dòng)力學(xué)分析軟件ADAMS 中,然后根據(jù)模型的材料和約束特性設(shè)置相應(yīng)的材料屬性和約束。在驅(qū)動(dòng)滑塊上設(shè)置驅(qū)動(dòng)函數(shù),驅(qū)動(dòng)滑塊將按照驅(qū)動(dòng)函數(shù)進(jìn)行運(yùn)動(dòng),從而進(jìn)行運(yùn)動(dòng)學(xué)仿真。
設(shè)軟件仿真設(shè)時(shí)間為10 s,步數(shù)為200。兩種方法得到天線展開(kāi)時(shí)肋頂點(diǎn)的運(yùn)動(dòng)軌跡如圖7 所示。滑塊分別在勻速運(yùn)動(dòng)速度規(guī)劃、勻加速勻減速速度規(guī)劃、三次多項(xiàng)式速度規(guī)劃、五次多項(xiàng)式速度規(guī)劃和正弦函數(shù)速度規(guī)劃下運(yùn)動(dòng)時(shí),天線肋展開(kāi)時(shí)質(zhì)心角速度變化曲線,分別如圖8(a)~圖8(e)所示,天線肋質(zhì)心角加速度變化曲線分別如圖9(a)~圖9(e)所示。

圖6 不同速度規(guī)劃下滑塊運(yùn)動(dòng)變化曲線Fig.6 Velocity curves of the sliding block in different velocity planning

圖7 天線展開(kāi)時(shí)肋頂點(diǎn)的運(yùn)動(dòng)軌跡Fig.7 Movement track of the rib vertex of the antenna when it is deployed
滑塊采用不同的速度規(guī)劃進(jìn)行天線肋的展開(kāi)時(shí),由圖6、圖8 和圖9 可以看出,當(dāng)天線采用五次多項(xiàng)式速度規(guī)劃進(jìn)行展開(kāi)時(shí),副面與天線肋展開(kāi)過(guò)程的速度加速度連續(xù)性更好,為滿足天線主副面展開(kāi)過(guò)程的平穩(wěn)性,滑塊采用五次多項(xiàng)式的速度規(guī)劃進(jìn)行天線肋的展開(kāi)較為合理。

圖9 天線肋角加速度變化曲線Fig.9 Angular acceleration curves of the antenna when it is deployed
3.2 接觸力仿真
在天線肋和底座之間添加接觸力,ADAMS 中接觸力[27-28]的法向力計(jì)算方法有補(bǔ)償法和基于碰撞函數(shù)的接觸算法兩種。補(bǔ)償法需要確定兩個(gè)系數(shù)——懲罰系數(shù)和補(bǔ)償系數(shù),而這些數(shù)據(jù)一般需要通過(guò)實(shí)驗(yàn)測(cè)得。本文選用基于碰撞函數(shù)的三維接觸力(IMPACT 型接觸力)。
IMPACT 函數(shù)的格式為

式中:q為距離變量,用來(lái)定義兩個(gè)點(diǎn)之間的距離;為q對(duì)時(shí)間的導(dǎo)數(shù),通常是速度;q1為IMPACT 的閥值,當(dāng)q>q1時(shí),IMPACT 為0,當(dāng)q≤q1時(shí),IMPACT不為0;ki為剛度系數(shù);e為力指數(shù);cmax為最大阻尼系數(shù);d為阻尼達(dá)到最大值時(shí)的切入量。
對(duì)于鋁材與鋁材接觸,以上參數(shù)值的選取見(jiàn)表1。

表1 IMPACT 接觸力參數(shù)Tab.1 IMPACT contact force parameters
IMPACT 函數(shù)的返回值如下:

式中:stepi為ADAMS 中的階躍函數(shù);ki(q1-q)e為彈性力;?stepi(q,q1-d,1,q1,0)為阻尼力。當(dāng)e=1,cmax=0 時(shí),IMPACT 函數(shù)相當(dāng)于只產(chǎn)生壓縮的線性彈簧。
滑塊采用以上5 種速度規(guī)劃進(jìn)行展開(kāi)時(shí),相應(yīng)的接觸力變化曲線如圖10 所示。滑塊運(yùn)動(dòng)到9.5 s時(shí),天線肋在不同速度規(guī)劃下開(kāi)始相繼和底座相接觸,接觸力變化滿足式(24),由于天線行程一定,天線完全展開(kāi)后的預(yù)緊力約為104 N。

圖10 接觸力變化曲線Fig.10 Contact force curves
滑塊采用不同的速度規(guī)劃進(jìn)行天線肋的展開(kāi),由圖10 可以看出,當(dāng)天線采用五次多項(xiàng)式速度規(guī)劃進(jìn)行展開(kāi)時(shí),天線肋與底座的接觸力變化曲線更加平穩(wěn),天線展開(kāi)過(guò)程中沖擊最小。綜合天線肋展開(kāi)過(guò)程中角速度與角加速度變化曲線,滑塊采用五次多項(xiàng)式速度規(guī)劃為最優(yōu)速度規(guī)劃。
4 結(jié)束語(yǔ)
本文針對(duì)長(zhǎng)焦距卡塞格倫式雙反射面?zhèn)銧钐炀€,提出了一種曲柄滑塊機(jī)構(gòu)與繩索機(jī)構(gòu)相結(jié)合的展開(kāi)機(jī)構(gòu),實(shí)現(xiàn)了主副面的同步展開(kāi),天線收攏后結(jié)構(gòu)緊湊。建立了天線展開(kāi)過(guò)程的運(yùn)動(dòng)分析模型,通過(guò)實(shí)例仿真,對(duì)比不同的速度規(guī)劃下天線展開(kāi)時(shí)副面的速度、加速度變化與天線肋的角速度、角加速度、接觸力變化,確定在五次多項(xiàng)式速度規(guī)劃下展開(kāi)最為合理。
猜你喜歡
百科探秘·海底世界(2024年6期)2024-06-27 23:10:58
中國(guó)就業(yè)(2024年4期)2024-06-12 00:00:00
公民與法治(2020年11期)2020-07-25 02:02:06
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
科學(xué)與財(cái)富(2017年15期)2017-06-03 17:49:35
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
藏天下(2016年9期)2016-04-12 22:33:42
中國(guó)工程咨詢(2016年4期)2016-02-14 07:28:28
