天文觀測衛星動中探測機動測試系統設計
2020-11-26 08:21:54陳洪亮羅榮蒸譚志云張若林王英爽劉鶴
中國空間科學技術 2020年6期
陳洪亮,羅榮蒸,譚志云,張若林,王英爽,劉鶴
1. 北京東方計量測試研究所,北京 100086 2. 北京空間飛行器總體設計部,北京 100094
面向天文觀測的空間科學衛星是對空間中的目標天體或天區進行觀測,一般包括巡天掃描、定點觀測、小天區掃描觀測等工作模式[1],除了要完成全天球掃描覆蓋以外,還需要對某些重要的局部小天區進行深度成像觀測。小天區深度成像和巡天觀測相比,主要是增加對局部天區的觀測時間以達到更高的靈敏度,進而發現更多的空間天文信息。為實現小天區掃描任務,面向天文觀測的某衛星設計了小天區動中探測工作模式,觀測目標為慣性空間某一有限張角的區域,通過整星姿態的旋轉使載荷光軸指向沿行掃和軸向方向連續運動,實現掃描覆蓋。為提高曝光深度,要求行掃速度為多級可調[如0.01(°)/s、0.03(°)/s、0.06(°)/s等],行間隔為多級可選(如0.1°、0.2°、0.3°等)。該機動模式過程復雜、姿態實時變化、指標要求更高,難以直接有效驗證。
系統級測試是地面開展的整星綜合測試,旨在驗證衛星功能性能的符合性[2],姿態機動能力的驗證評估是其重要環節。一些學者針對姿態機動開展了星上軌跡規劃算法研究和分析統級、系統級測試設計研究。文獻[3-4]分別設計了衛星對地觀測模式和對日定向模式姿態機動控制律;文獻[5]考慮執行機構失效情況的不可預測性,設計了自適應操縱律,實現了空間站的大角度姿態機動;文獻[6-7]設計了控制分系統仿真系統,為姿態機動測試提供驗證環境;文獻[8]設計了主控機、動力學模型和數據分析系統,滿足對地觀測敏捷衛星分系統級姿態機動測試;文獻[9]針對利用姿態機動進行天線方向圖測試問題,給出了地面操作及操作計劃制訂方法,并通過工程實際驗證了該方法的有效性;文獻[10]針對SGCMG群敏捷衛星,提出一種姿態機動測試用例設計方法,實現了對SGCMG群敏捷機動能力與系統指標的全面考核。上述研究完成了測試用例設計、可視化判讀基礎理論分析,構建了對地觀測衛星分系統級機動測試環境,但對于動中探測整星測試缺乏系統性研究。且空間科學衛星具有慣性空間定向、適應多種姿態機動觀測模式等特點,需在觀測不同類型天區時快速改變其觀測模式,傳統的對地觀測衛星測試環境和測試方法難以對其進行有效驗證。
本文根據某天文衛星任務特點,分析其長期任務中姿態指向模式的約束條件,設計了動中探測姿態整星系統級機動測試環境,并通過對該系統完成衛星整星多模式姿態機動測試,驗證了動中探測模式的有效性及其功能指標滿足設計要求。
1 慣性空間動中探測工作模式
(1)巡天觀測模式
衛星首要任務是獲得和繪制X射線天圖,其主要技術指標是實現全天球掃描覆蓋。衛星采用對日定向慢旋的方式實現全天球掃描覆蓋,星體某一軸對準太陽,載荷光軸垂直于對日軸并使整星繞對日軸自旋,利用地球繞太陽公轉及衛星繞本體軸的自旋實現對全天球的掃描覆蓋[11-13]。其觀測等效示意如圖1所示。
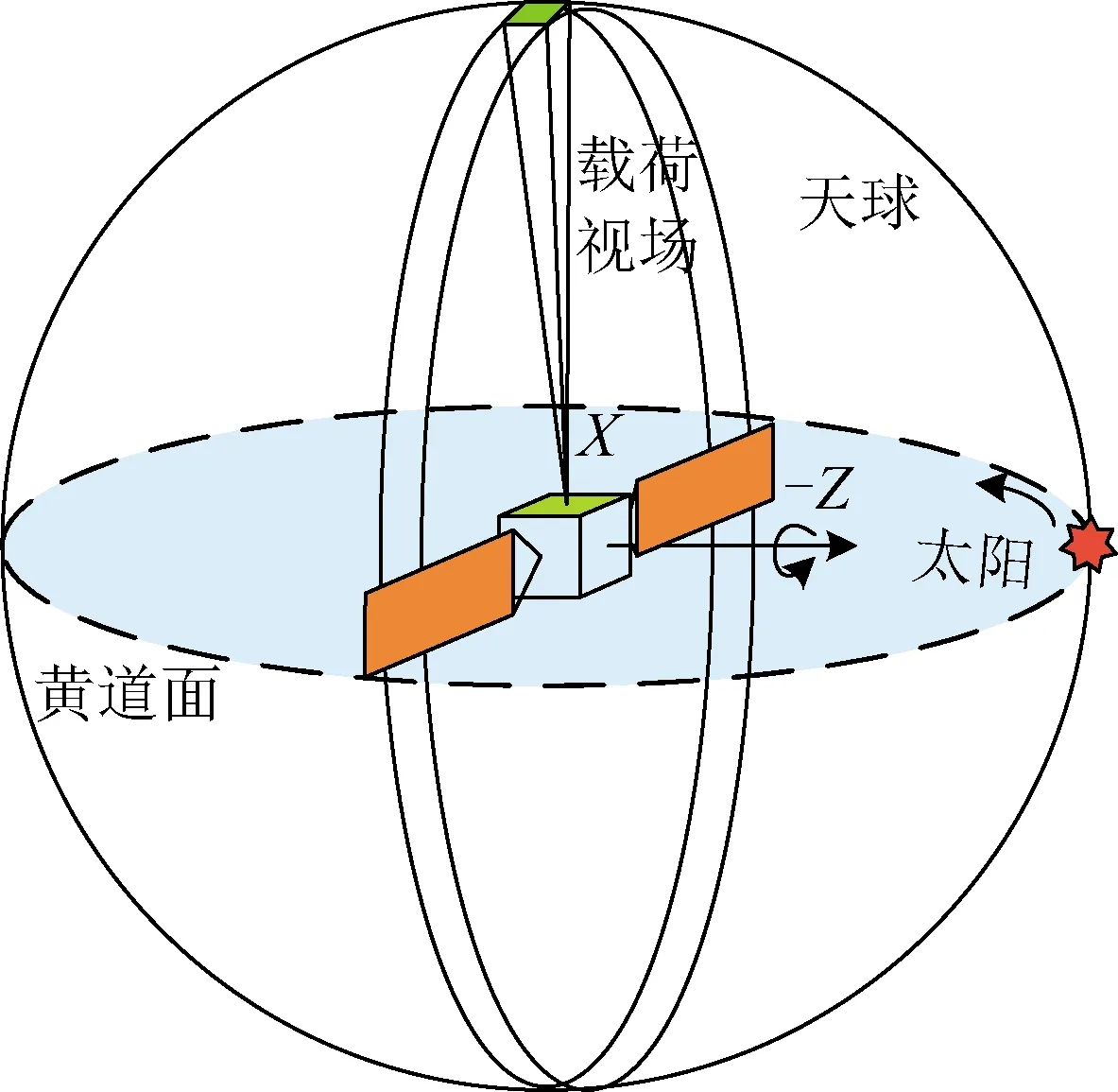
圖1 巡天觀測等效視運動示意Fig.1 Diagram of sky survey observation equivalent motion
(2)小天區觀測模式
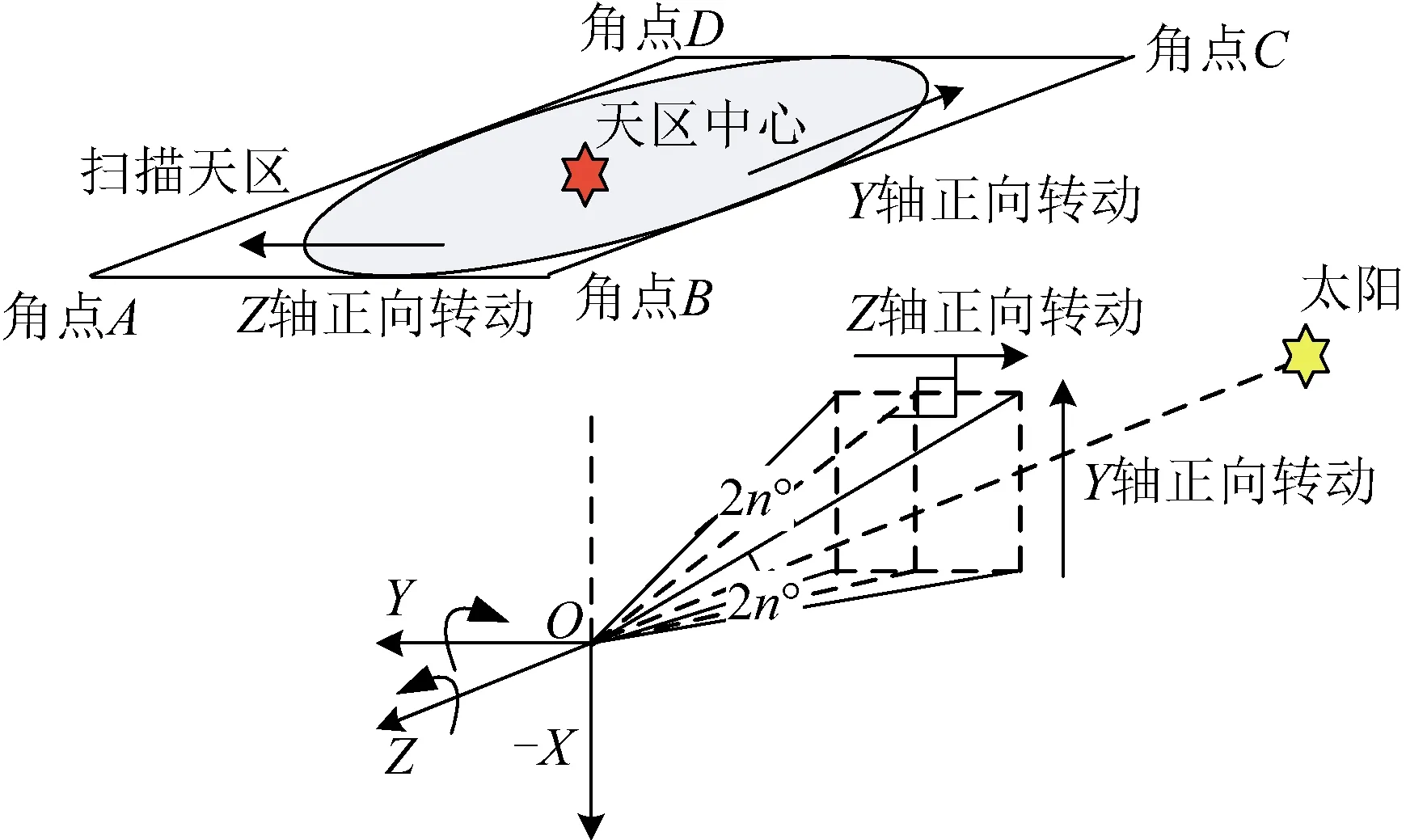
圖2 小天區掃描觀測原理示意Fig.2 Principle of small sky zone scanning observation
衛星利用星載科學載荷對用戶感興趣的天體目標進行定點或區域掃描觀測。其中,利用小天區成像掃描觀測,完成對銀核等重要天區的深度成像觀測。小天區掃描觀測模式是對慣性空間中一個n°(n≤11)角半徑的圓區域進行深度成像觀測,見圖2,其觀測中心位置、掃描半徑以及掃描速度、掃描行間距等掃描參數由用戶根據需求確定。掃描觀測時間通過掃描參數計算得到,從幾小時至幾天不等[14-16]。衛星設計動中探測模式,通過整星姿態機動過程中開啟載荷工作實現深度小天區掃描。
2 整星測試環境設計
傳統姿態機動測試系統以針對靜態成像方式為主,通過地面注入固定的姿態機動目標角度,從整星下傳的姿態遙測數據判斷星上算法設計的正確性。相對傳統測試系統,空間科學衛星動中探測過程對測試驗證提出了新的要求:
1)姿態機動時刻與載荷工作實時關聯要求:傳統靜態的時刻注入方式無法滿足動中探測姿態信息與目標任務之間的動態時序關系。
2)以慣性空間定向為基礎的動力學仿真模型:傳統對地觀測動力學模型無法適應空間觀測任務。
3)測試數據分析與指標符合性判讀的實時性與直觀性要求:傳統的數據分析方法在對衛星姿態機動能力評估時,主要進行遙測數值或曲線判讀分析,重在對機動時間和穩定度指標上的考核,不能直接顯示衛星在空間環境中的運行狀況,數據判讀可觀性差,對動中探測過程中的姿態路徑規劃、掃描條帶與預期效果吻合度等系統效能評估無法實時有效判讀。
針對上述問題,設計了適用于慣性空間定向空間探測衛星動中探測姿態機動測試系統,該系統由閉環仿真平臺、自動化測試平臺和三維顯示判讀平臺三部分組成,如圖3所示。各部分主要功能描述如下:
1)閉環測試平臺:設計衛星慣性空間定向姿態軌道動力學,經星地接口采集星上執行機構輸出信號,通過動力學模型模擬星上環境變化,計算并輸出敏感器信號,信號經過調理后發送至敏感器;同時,地面動力學、導航仿真器與星上測控、控制共同建立星地時間統一系統,以實現星上與地面閉環測試時序高度統一。
2)自動化測試平臺:開展測試用例的自動化編制與執行,保證機動測試與載荷任務執行時序統一。其中STS3000為新一代智能化測試平臺。
3)三維顯示判讀平臺:基于STK與Matlab軟件的雙向通訊技術,開發了基于STK的實時遙測可視化判讀系統。實時數據驅動下利用STK實現了遙測數據直觀、簡潔的可視化演示,給測試人員和設計人員以更形象的理解,實現航天器測試數據可視化實時三維判讀。
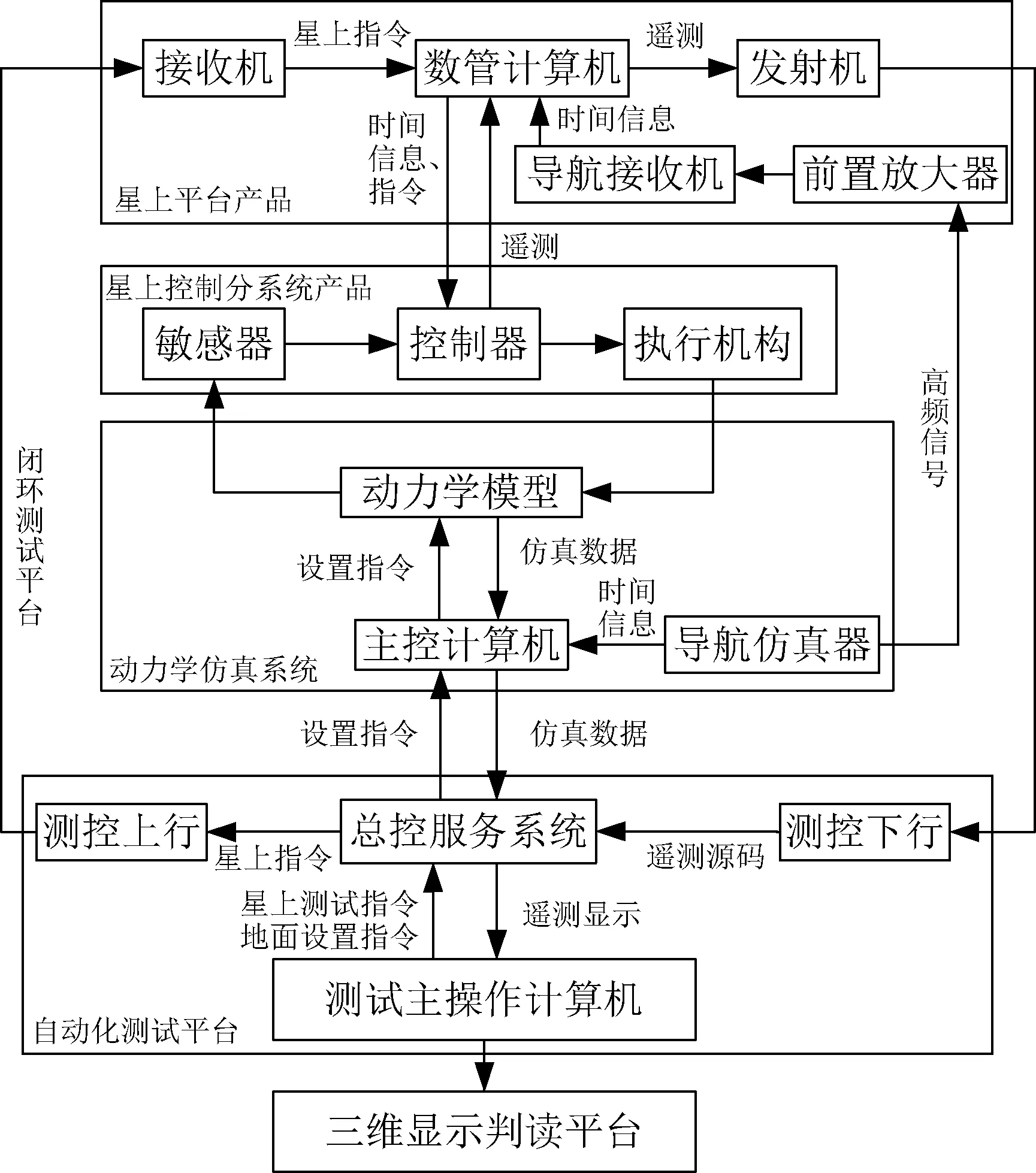
圖3 動中探測測試系統信息流圖Fig.3 Information flow of dynamic-exploration test system
各部分相互協調工作,完成姿軌控閉環測試、時間同步、測控通道和數據判讀分析四部分功能:
1)姿軌控閉環測試系統:動力學計算機負責星體動力學仿真,并將仿真結果與星上產品進行實時交互,與星上控制產品形成閉環。
2)時間同步系統:以導航仿真器為核心,模擬導航衛星在軌運行信息,將時間信息同時發送給主控計算機與星上導航接收設備,并通過數管發送給控制分系統控制器,由此建立動力學模型與星上控制器之間的時間同步系統。
3)遙測遙控閉環通道系統:總控服務器為測控通道地面核心設備,負責將指令發送給星上設備及地面閉環設備,同時解析接收下星遙測,并進行數據分析;數管計算機為測控星上部分核心設備,負責將指令分發給相應設備,同時收集各分系統遙測信息,發送至地面系統。
4)數據分析判讀系統:測試主操作計算機為人機交互界面和可視化判讀平臺,測試人員通過操作計算機進行與總控服務系統進行通訊,完成指令發送與遙測判讀任務,以及三位實時場景判讀任務。
2.1 慣性空間定向目標姿態模型
小天區掃描模式要求控制星體+X軸指向局部天區進行逐行掃描,因此目標坐標系隨時間變化。如圖2所示,定義局部天區大小為A×B;定義l為給定的空間指向(衛星質心指向局部天區中心的方向矢量),s為衛星質心指向太陽的方向矢量,掃描角速度為 Δω,則小天區掃描模式的目標坐標系為:
局部天區中心目標坐標系相對于慣性系的方向余弦陣為:
式中:(X)ECI為矢量X在慣性系上的投影。
局部天區中某一點的目標坐標系相對于慣性系的方向余弦陣為:
Cti=Cy(-B/2)Cz(-A/2)Ct
式中:Cz,Cy分別為目標點相對于天區中心繞星體Z軸和Y軸旋轉的方向余弦陣。
記ΔA,ΔB為繞星體Z軸和Y軸旋轉的角度, Δt為控制周期,則掃描邏輯為:
ΔA=ΔA+Δω·Δt,ΔB=ΔB+Δω·Δt
下一時刻目標坐標系相對與慣性系的方向余弦陣為:
Ct2i=Cz(ΔA)Cy(ΔB)Cti
2.2 星地時間統一設計
為了滿足姿態機動時刻與載荷工作實時關聯要求,設計了由BD2和GPS組成的高動態時間信號模擬源。主要用于整星校時,并為整星提供高精度的定位、定軌數據,以提高遙感數據事后分析的精度要求。通過BD2-GPS高動態信號模擬源可以模擬產生高動態的GPS L1/L2和BD2 B1/B2/B3衛星導航信號,從而完成對GPS接收機和BD2接收機的性能指標測試,同時還能滿足遙感衛星在整星電測期間的模飛測試需求。該設備能夠對導航接收機的信號捕獲能力以及整星電測期間星上設備的定位、定軌精度進行驗證。

圖4 時間信號模擬源信息流圖Fig.4 Schematic diagram of time signal simulation source
模擬源由數學仿真模塊、中頻信號生成模塊和射頻模塊組成:
1)數學仿真模塊:時空系統仿真,包括時間系統的仿真和坐標系統的仿真;載體軌跡仿真,模擬載體的運動,并生成載體的坐標軌跡數據,能夠根據輸入的目標高動態運動特性模擬高動態對導航接收機的影響;軌道攝動仿真,根據衛星在圍繞地球運動的過程中受到多種作用力的影響;載體運動仿真,主要仿真載體運動軌跡信息與載體姿態信息;星座仿真:主要實現BD、GPS系統衛星導航的仿真,仿真衛星以及載體的運動姿態,空間環境等信息。
2)中頻信號生成模塊:能夠產生獨立的BD2 B1、B2、B3頻點的中頻信號;能夠產生獨立的GPS L1、L2頻點的中頻信號。由BD2中頻信號生成單元、GPS中頻信號生成單元、控制單元和時鐘頻率綜合單元組成。
3)射頻模塊:完成將中頻輸入的BD2 B1、B2、B3頻點QPSK擴頻調制信號,GPS L1、L2頻點QPSK信號進行上變頻處理、功率調整,最終得到相應的射頻信號。
2.3 實時遙測可視化判讀設計
可視化判讀系統以成熟的STK仿真軟件作為演示環境,在Matlab中處理機動過程遙測,并發送給STK相關演示指令,利用Matlab與STK之間的接口模塊[17-18],驅動STK運行,實現姿態機動過程實時場景顯示。STK與Matlab的通信主要是通過兩個模塊,其中STK/Connect模塊提供了一種使用客戶機/服務器端方式連接STK的快捷工作方式。STK/Connect設計用于給第三方的應用程序提供一個向STK引擎發送指令和接收數據的通信路徑。STK/Connect允許打開Microsoft COM或者TCP/IP到STK的連接,發送STK/Connect指令,接收STK的數據,完成后關閉連接。STK/Connect也提供一個消息功能以用戶定義的方式來輸出錯誤和診斷信息。另外,STK本身的STK/Matlab接口在STK和Matlab之間提供了一個雙向的通信路徑,在Matlab工作區通過Connect模塊以TCP/IP協議代開STK端口。利用超過150個Matlab指令,如使用STK支持的分析功能一樣,Matlab的用戶可以使用STK的功能對軌道、彈道、軌跡進行建模與分析。整個系統的結構如圖5所示。
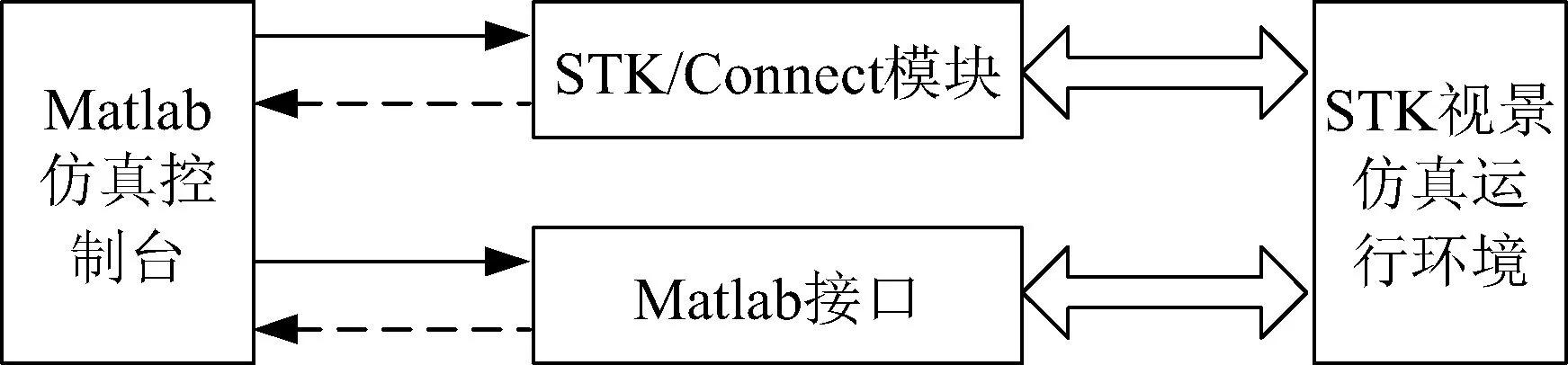
圖5 Matlab與STK連接的系統結構Fig.5 System structure of connected Matlab and STK
3 整星姿態機動方案驗證
采用本文設計的整星級測試方案,對動中探測姿態機動模式進行驗證。以機動到某目標位置并進行小天區掃描為例:目標赤經-5.678°,赤緯-11.45°,掃描速度0.06(°)/s,間隔0.1°,邊長5°。
圖6為動中探測機動過程中截取的三維實時顯示場景效果圖像,能直觀判斷機動過程。圖7為小天區掃描過程,機動到目標位置(-506 78°,-11.45°)后,以0.1°間隔進行掃描,邊長為5°,掃描到位后返回反向掃描,與設計狀態一致。圖8為掃描過程中的行掃角速度,與設計值一致。

圖6 機動過程三維顯示Fig.6 Attitude maneuver 3D display
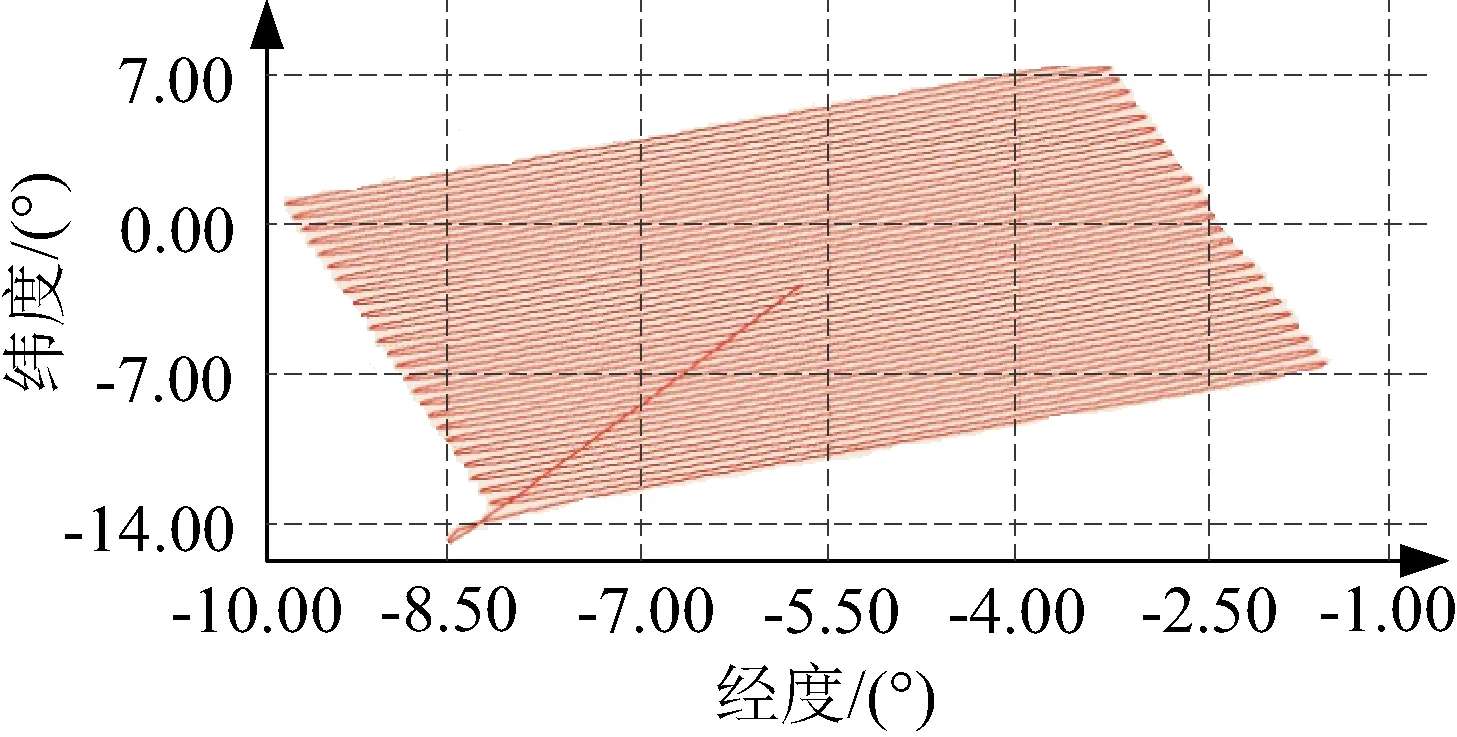
圖7 行掃過程Fig.7 Scanning process
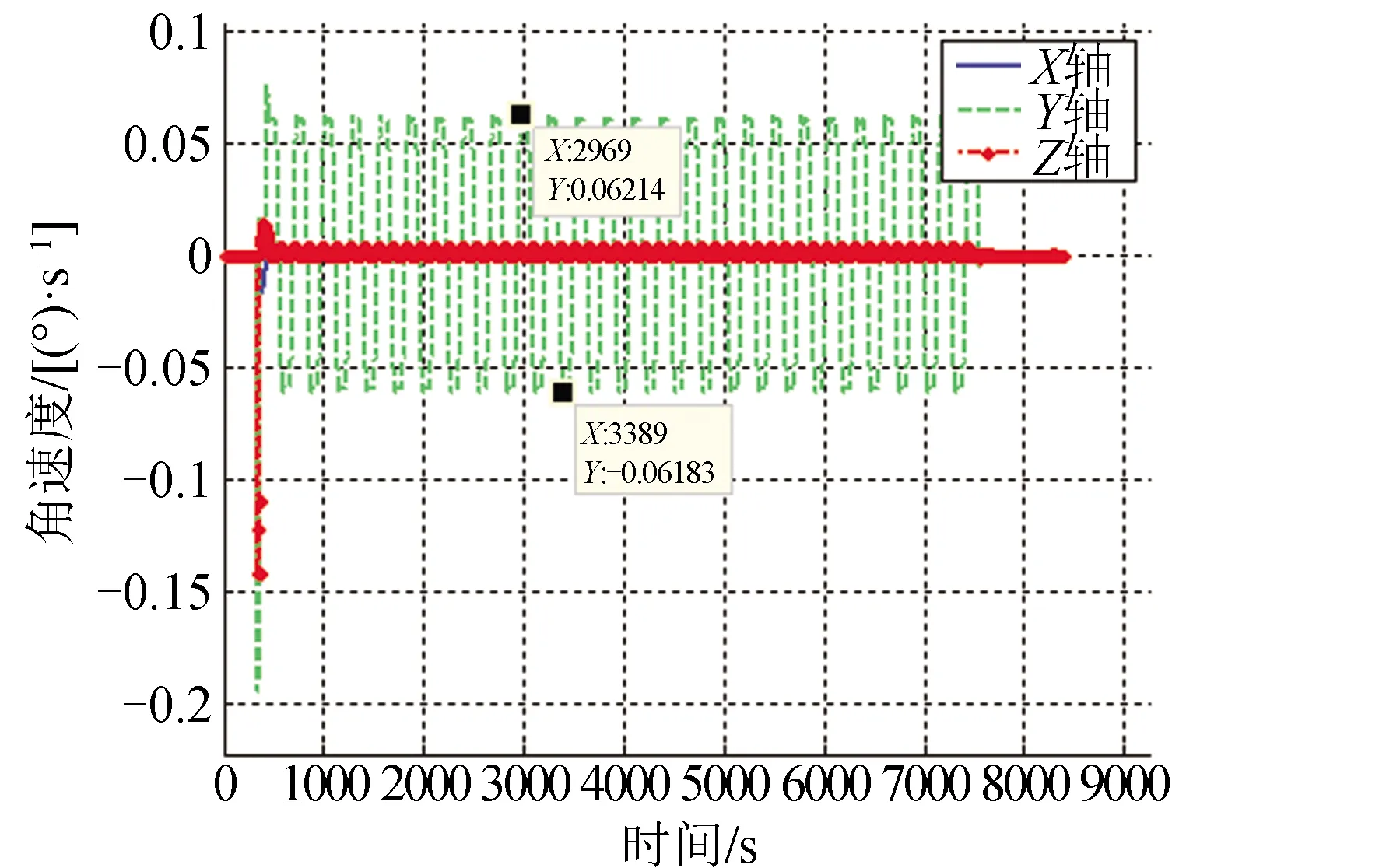
圖8 行掃角速度Fig.8 Scanning angular velocity
4 結束語
本文針對天文觀測空間科學衛星動中探測技術設計了系統級測試方案,建立了慣性空間目標姿態計算算法、星地時統系統和可視化顯示系統,以有效驗證動中探測機動功能性能與在軌使用需求的符合性。經整星系統級測試試驗驗證可知,該方案提升了姿態機動測試系統的適用性和判讀直觀性,可對動中探測機動功能進行全面驗證,測試覆蓋性全面,測試數據充分、有效,可為后續空間科學衛星姿態機動測試提供理論和實踐參考。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16