北斗GEO衛星CEI相時延解算方法研究
2020-11-26 08:22:00陳少伍王靜溫黃磊徐得珍
中國空間科學技術 2020年6期
關鍵詞:信號
陳少伍,王靜溫,黃磊,徐得珍
1. 北京跟蹤與通信技術研究所,北京 100094 2. 北京遙測技術研究所,北京 100094
通過相距10~100 km的2個測站之間的光纖進行頻率和信息的傳遞,以實現對2個測站接收信號延遲的精確測量,進而可以實時或準實時地確定目標相對兩站間基線矢量的精確角位置。該技術在地球靜止衛星相對定位、近地空間交會對接航天器相對狀態監視中均具有重要作用[1-3]。此外,該技術在深空航天器導航中也具有重要作用[4-7]。
連線端站干涉測量(connected element interferometry,CEI)技術通過光纖把一個測站時間和頻率信息傳送至其他測站,消除了傳統甚長基線干涉測量(very long baseline interferometry,VLBI)技術中獨立本振頻率穩定性和時間同步的影響。由于測站距離近,航天器信號至測站傳播路徑上電離層、大氣效應具有很強的相干性,通過差分能夠很好地消除。美國國家航空航天局(NASA)開展了大量研究及試驗,并取得了很好的效果,日本也在20世紀90年代開展相關試驗。國內,北京航天飛行控制中心、信息工程大學及裝備學院等均開展了相應仿真和實測分析研究,這些研究為該技術奠定了基礎[8-12]。目前,研究方向主要為傳統差分單向測距(differentia one-way ranging,DOR)或寬帶信號CEI測量精度仿真[9-13]、CEI技術定軌精度分析[14-15]。采用傳統干涉測量方式,通過交替觀測射電源和航天器,消除共性誤差,獲取時延觀測量[13]。
目前,近地航天器無下行DOR音信號,只能發送下行測距和遙測信號,基于DOR音和寬帶信號的傳統處理分析方法不再適用。本文在此基礎上開展研究,利用佳木斯深空站構建CEI系統,對北斗地球靜止軌道(geosynchronous earth orbit,GEO)衛星進行觀測,利用下行相干測距信號解算相時延,并根據GEO精密軌道對CEI群時延(group delay,GD)和相時延(phase delay,PD)殘差進行評估。
1 連線端站干涉測量系統
首先構建連線端站干涉測量系統。選取佳木斯深空站作為主站,選取距離主站50 km的另一個測站作為副站,兩者之間通過光纖設備進行連接,構建連線端站干涉測量系統如圖 1所示。佳木斯深空站配備高穩氫鐘,同時站內配備有全球定位系統 (global position system,GPS)接收機,站內時頻分系統利用氫鐘頻率、GPS接收機數據生成時間信號,通過光纖將時間和頻率信息傳送至副站。
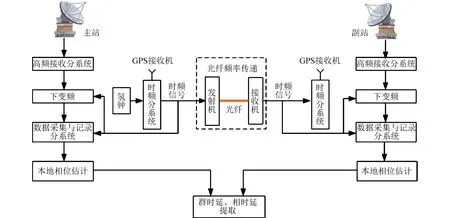
圖1 CEI系統基本原理框圖Fig. 1 The schematic of the CEI system
航天器信號經過空間傳播后,分別達到地面主站和副站。信號經高頻接收系統接收、下變頻處理,送入數據采集和記錄分系統。通過本地相位估計提取主站和副站信號的相位,最后相位送至處理中心,計算站間相位差并解算群時延和相時延。在下變頻處理以及數據采集記錄過程中均采用本地時頻分系統產生的時間和頻率信號。由于兩個測站通過光纖實現了時間和頻率的同步,因此下變頻處理以及數據采集記錄均是同一頻率源。
傳統VLBI中均采用了DOR音信號作為下行信標。通常,近地航天器下行僅測距音及遙測信號,無DOR音信號。遙測信號采用普通晶振,頻率穩定度較差,由此將引入時延測量誤差。
為此,本文提出了一種新的測量方法,即相干測距模式下CEI測量。測量原理如圖 2所示,副站對航天器進行測控過程中,副站發送上行測距信號,器上應答機接收信號并進行相干轉發,信號經過接收系統和下變頻處理后,由數據采集與記錄設備進行開環記錄。

圖2 相干測距模式下CEI系統測量示意Fig. 2 The sketch map of CEI in coherent ranging mode
主站氫鐘頻率是主站頻率參考,同時通過光纖時頻傳遞系統傳遞至副站,主站、副站均采用氫鐘頻率作為頻率參考。副站對航天器進行上行測控,上行載波和測距信號由副站頻率源生成。航天器相干測距模式下,下行信號與上行相干。因此下行信號傳播、主站和副站地面采集與記錄設備均以氫鐘頻率為參考。
2 CEI誤差分析
干涉測量中主要誤差有:對流層、電離層等引入的誤差,測站間時鐘誤差,測站位置誤差,設備時延誤差等[12-13,16]。相對于VLBI系統,CEI系統對流層誤差、電離層誤差等共性誤差可很好地消除,以下針對佳木斯深空站CEI系統和北斗GEO衛星進行具體分析。
2.1 對流層時延誤差
對流層時延可表示為:
τtrop=τZHD×mh+τZWD×mw
(1)
式中:τZHD、τZWD分別為對流層干燥大氣、水蒸氣時延;mh、mw為對應的Neill映射函數,通常兩者非常近似,因此τtrop=τZTD×mh,τZTD為天頂方向總大氣時延。
在CEI測量中兩個測站距離非常近,觀測目標為地球靜止軌道衛星(距離測站約3.6×104km),兩者俯仰角之差小于0.5°,信號到達兩個測站的空間傳播路徑相近,誤差相關性很強,站間差分消除共有誤差影響。假設τZTD為2 m,利用佳木斯深空站對北斗G6衛星進行觀測時,俯仰角約30°,此時大氣時延誤差為0.1 ns。
2.2 電離層時延誤差
單個測站電離層時延可表示為:
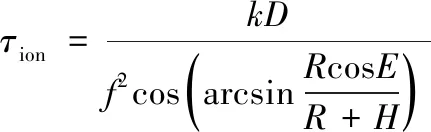
(2)
式中:k為常數,k=1.34×10-7;f為電磁波的頻率;D為信號傳播路徑上的總電子含量;R為地球半徑;H為電離層高度;E為俯仰角。
CEI測量系統電離層時延誤差為該基線上兩個測站的電離層時延之差,即:
Δτion=τion1-τion2
(3)
式中:τion1、τion2分別為信號傳播到主站和副站的電離層時延。
北斗GEO衛星下行測控信號為S頻段,假設D為50 TECU(1 TECU=1016個電子/m2,D實際值為10~20 TECU) ,兩站俯仰角之差小于0.5°,利用佳木斯深空站對北斗G6衛星進行觀測時,電離層時延誤差為0.008 ns。
2.3 設備時延誤差
設備時延誤差主要為信號經接收機后,信號在地面設備傳輸過程中引入的時延誤差。主要包括:電纜時延、下變頻設備時延、采集設備通道時延、信號處理硬件時延等。此外由于溫度、濕度等環境變化,導致儀器設備時延抖動。
2.4 時間同步誤差
CEI系統采用光纖傳輸時間和頻率信息,站間距較短時間同步精度較高。光纖傳遞法可以實現0.1 ns或更低的時間同步精度。
時間同步引入的系統誤差可以表示為:
στ1=ετ
(4)
式中:ετ為站間時間同步誤差。目前站間時間同步誤差為0.1 ns,其引入的時延系統差為0.1 ns。
時間同步引入的隨機誤差可表示為:

(5)
式中:Δf/f為阿倫方差;Tint為積分時間。目前氫鐘的阿倫方差假設為10-14/s,每次觀測的積分時間為1 s,時間同步引起隨機差為1.4×10-4ps。
2.5 熱噪聲誤差
利用佳木斯CEI系統對北斗GEO觀測時,整個鏈路預算情況參如表 1所示。根據表1可知,載波信號站間相位差的隨機誤差為0.002 14°;主音信號站間相位差的隨機誤差為0.003 98°。因此,±100 kHz測距信號群時延隨機誤差為5.5 ns,載波相時延隨機誤差為0.27 ps。
3 相時延解算與試驗結果分析
3.1 試驗情況
利用佳木斯深空站CEI系統進行2次試驗。第1次試驗為第1天8:40~10:50,第2次試驗為第2天8:50~11:40。試驗首先對北斗G6衛星進行長時間觀測,再進行間斷觀測。觀測過程中,副站對北斗G6衛星發送上行信號,深空站和副站同時采集和記錄下行信號。
北斗G6衛星下行信號頻譜如圖 3所示,主要包括載波和±100 kHz測距音信號3個頻點。根據采集記錄的北斗G6衛星下行數據,提取載波和±100 kHz測距音相位,獲得站間相位差記
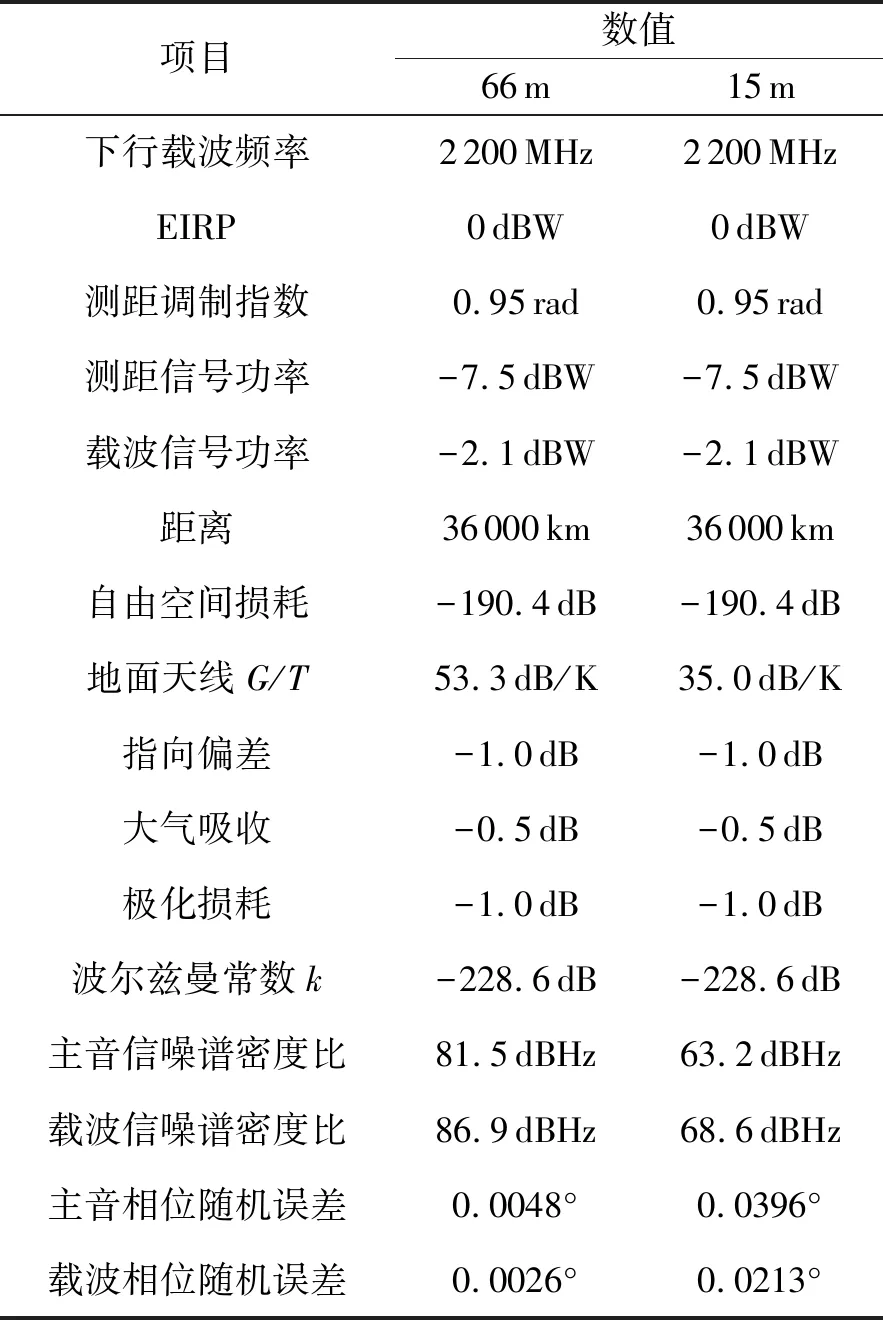
表1 地球靜止軌道衛星鏈路分析及相位估計隨機誤差
為φi(i=-1,0,1,分別表示-100 kHz測距音、載波和+100 kHz測距音)。3個信號的站間相位差如圖 4所示。根據圖 4可知在連續觀測弧段內北斗G6衛星站間相位差連續。
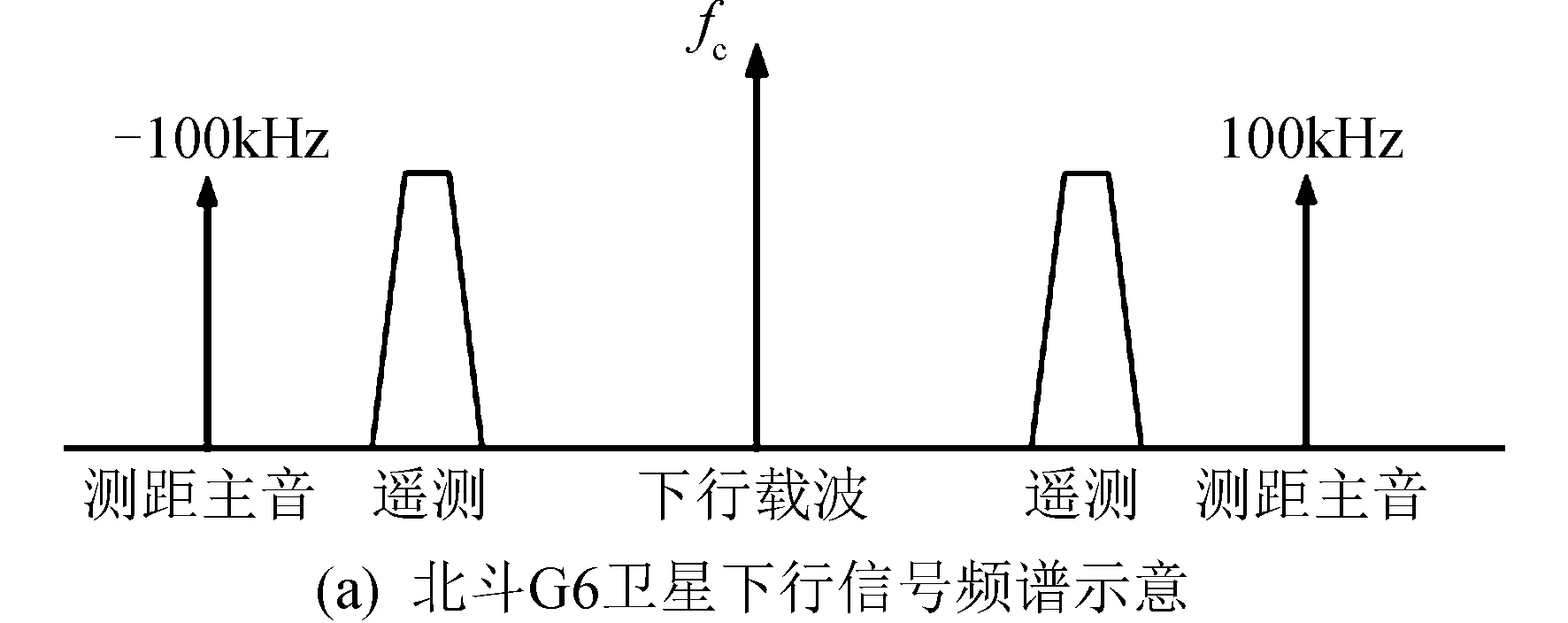
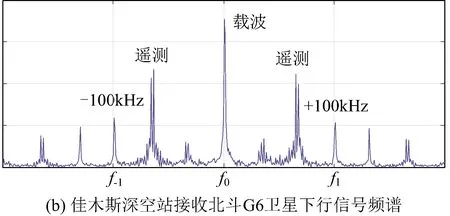
圖3 北斗G6衛星下行信號頻譜Fig. 3 The spectrum of BDS G6 downlink signal
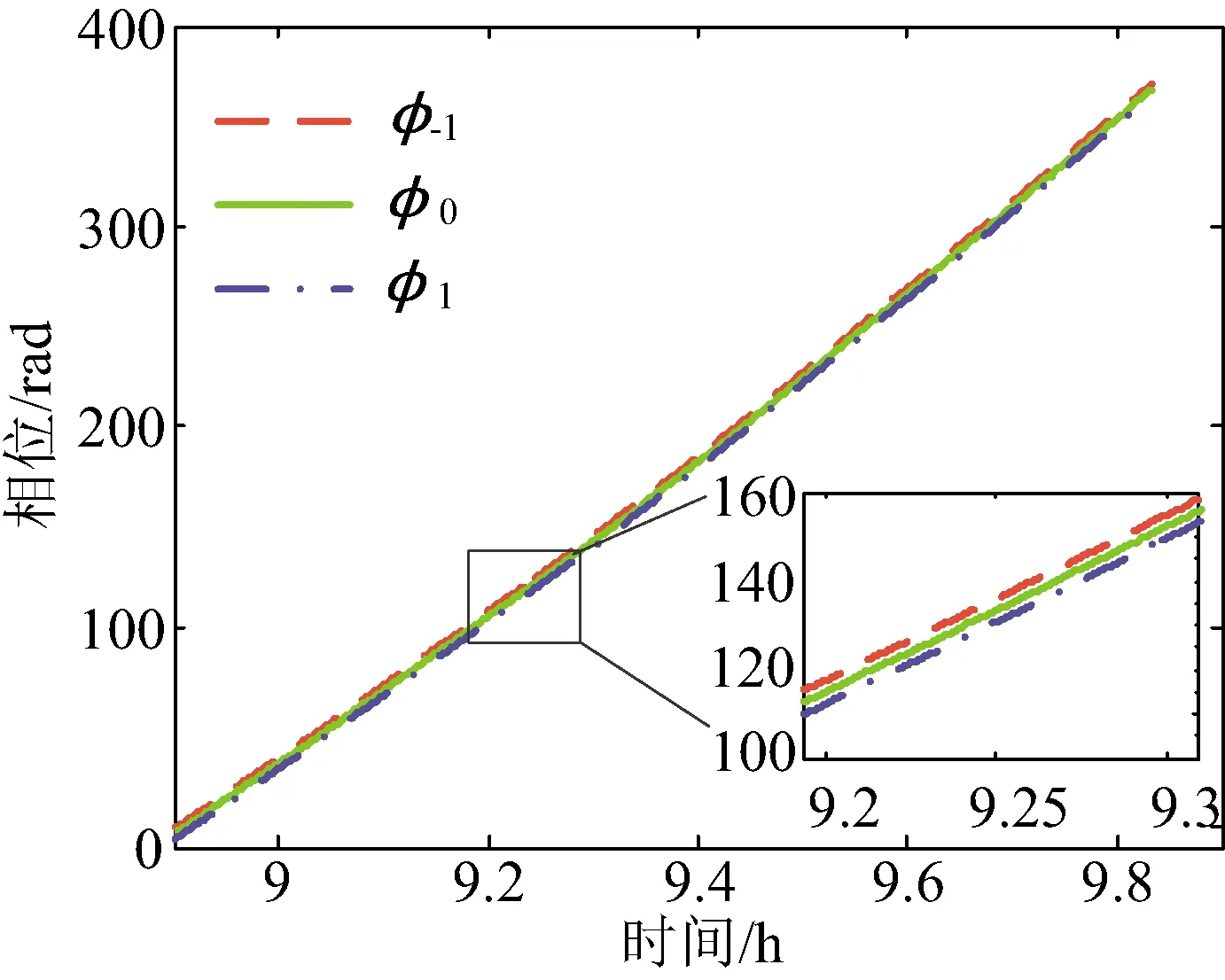
圖4 北斗G6衛星3個頻點的相位差時間變化曲線Fig. 4 The phase difference of the carrier and ranging signals of BDS G6 satellite
3.2 群時延解算
站間相位差φi可以表示為:
φi=2π(fiτgeo+fiτels-kΔD/fi+Ni)+σi
(6)
式中:fi為信號頻率;τgeo為幾何時延;ΔD為信號路徑上電子密度含量之差;τels為對流層、儀器設備和鐘差引入的時延誤差之和;Ni為相位整周模糊;k為常數,k=1.34×10-7;σi為相位噪聲。
測距音最大帶寬為200 kHz,群時延一個整周模糊為5 000 ns。目前北斗GEO衛星導航電文位置誤差為5 m,對應50 km基線時延誤差為20 ps。根據前文分析,電離層引入的時延誤差為8 ps,相時延隨機誤差在10-2ps量級。上述誤差遠小于5 000 ns,因此,測距音和載波之間相位不存在整周模糊(N-1=N0=N1)。根據多頻點群時延推導法[17-18],群時可以表示為:
ΔτGD=(φ1-φ-1)/2π(f1-f-1)
(7)
3.3 相時延解算
為提高測量精度,本文在群時延解算的基礎上,進行進一步研究,提出了相干狀態下北斗GEO衛星高精度CEI相時延推導求解方法。

佳木斯CEI系統對北斗G6衛星進行觀測時,兩站俯仰角幾乎相同。載波以及±100 kHz測距音信號頻率非常接近,群時延和相時延中電離層引入誤差約8 ps,遠小于S頻段一個整周時延(0.45 ns),因此利用群時延結果可以對相時延進行約束。為此本文提出了適用于CEI系統的群時延輔助求解相時延方法。基本思路如下:
1)采用多頻點群時延推導法求解群時延ΔτGD,對連續觀測弧段內的群時延結果進行預處理,剔除野值;
2)對擬合殘差進行積分處理,獲得積分時間60 s時群時延結果。
北斗GEO衛星相對地面站運動速度在10 m/s量級,兩次觀測時刻時延變化約40 ps,對應S頻段相位變化約0.16π,因此連續觀測弧段內站間相位差分連續。根據上述原理,獲得連續站間相位差。對弧段內連續站間相位進行整周補償,不同整周模糊時相時延和群時延結果見圖 5上圖,根據上述結果計算不同的整周模糊對應的相時延和群時延之差的標準差見圖 5下圖。標準差最小時對應該弧段整周模糊N0。整周模糊補償,解算相時延ΔτPD可以表示為:
ΔτPD=(φ0+2πN0)/(2πf0)
(8)

圖5 群時延輔助求解整周模糊示意Fig. 5 The schematic of resolving cycle ambiguity using group delay
3.4 結果分析
根據站間差分相位數據,提取北斗G6衛星群時延和相時延結果如圖 6所示。根據圖 6可知,兩者隨時間變化趨勢一致,群時延結果曲線存在較大的隨機誤差,相時延隨機誤差遠小于群時延隨機誤差。

圖6 北斗G6衛星CEI時延值隨時間變化曲線Fig. 6 The CEI delay of BDS G6 satellite
首先對北斗G6衛星進行1 h10 min長時間觀測,利用群時延和相時延標定CEI系統誤差分別為-241.05 ns、-241.31 ns。在此基礎上對后續4個弧段的測量結果進行修正,根據北斗G6衛星精密星歷獲得時延觀測量殘差,結果如圖 7所示。根據圖 7(a)可知,群時延和相時延殘差均在零值附近變化,群時延殘差在±4 ns范圍內變化,根據圖 7(b)相時延殘差結果可知,相時延殘差在±100 ps范圍內變化。群時延殘差精度較差,相時延精度顯著提高。
為了使結果不失一般性,對兩次試驗的群時延和相時延殘差進行統計,統計結果如表2所示。根據表2可知,群時延和相時延殘差系統差分別為0.48 ns和0.08 ns,相時延解算整周模糊,系統誤差顯著減少。群時延和相時延殘差標準差(3σ)分別為4.2 ns、0.13 ns,相時延殘差標準顯著減少。
以下對上述結果進行進一步分析。目前北斗G6衛星導航電文位置誤差引入時延誤差為20 ps,電離層和對流層引入時延誤差在10 ps量級。根據第2.5小節中鏈路預算結果,測量設備熱噪聲引入群時延的隨機誤差為5.5 ns,遠大于其他誤差影響,群時延誤差中主要表現為隨機誤差。該隨機誤差與實際觀測獲得的時延隨機誤差相當。根據鏈路預算結果,相時延機誤差為0.3 ps,根據圖7(b)可知,相時延殘差存在約100 ps誤差,存在明顯的趨勢項。這些趨勢項主要反映北斗G6衛星殘余位置誤差、電離層及對流層引入誤差。


圖7 北斗G6衛星CEI系統時延殘差結果Fig. 7 CEI delay residual of BDS G6 satellite
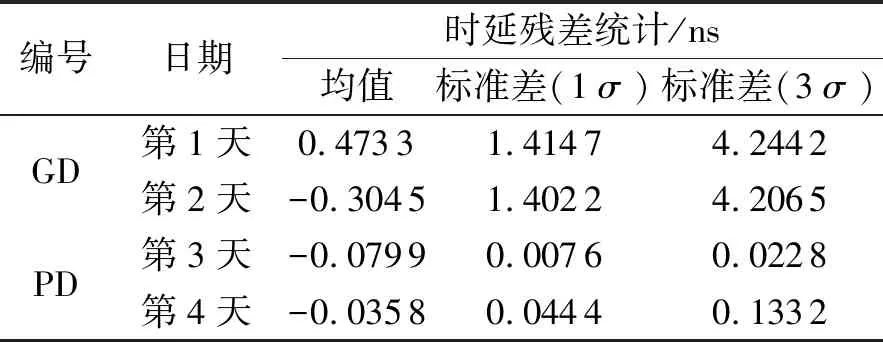
表2 CEI時延殘差統計結果
4 結束語
本文介紹了基于光纖時間頻率傳遞技術構建的CEI測量系統,提出了利用相干測距音和載波信號作為信號源的干涉測量模式,定量分析CEI測量的主要誤差因素。根據CEI試驗記錄的數據,獲得了站間相位差,解算群時延和相時延。試驗結果表明,利用相干測距信號成功獲取相時延,相時延殘差均值為0.08 ns,標準差可達到100 ps量級。
本文提出的方法主要技術優點為:
1)基于現有測音測距技術體制,利用測距信號即可實現,不需要DOR音及寬帶信號;
2)利用光纖時頻傳遞技術并配備采集記錄設備即可實現測量;
3)在現有條件下測量精度可達100 ps量級。
該研究對共位地球靜止軌道衛星高精度的差分相時延測量、精密相對定位以及月球及深空探測器高精度測軌定位均具有重要參考意義。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06