基于激光跟蹤儀的工業機器人位置重復性測試
2020-11-27 10:04:42陳國培
機電工程技術 2020年10期
關鍵詞:測量
陳國培
(福建省特種設備檢驗研究院,福州 350008)
0 引言
目前中國已成為全球第一大機器人應用市場。雖然市面上工業機器人品牌種類繁多,但質量卻良莠不齊,直接影響用戶的使用效果和人身安全。有效地評估工業機器人質量水平就顯得至關重要。
GB/T 12642-2013 規定了14 項工業機器人性能指標和測試方法,其中位置準確度和位置重復性是工業機器人性能的重要指標,受機器人零部件制造及裝配誤差、傳動機構磨損、編碼器測量誤差、負載變化、溫度等多種因素的影響[1-2]。通常工業機器人的重復定位精度很高,但絕對定位精度較低[3]。由于目前工業機器人絕對定位精度沒有參考標準,出廠時廠家一般會提供重復定位精度。為此,在工業機器人性能評定中,位置重復性是最主要的一項測試指標[4]。激光跟蹤儀的出現,很好地解決了機器人性能測試中測試環境搭建復雜、測試精度不高等問題。本文著重介紹利用激光跟蹤儀實現工業機器人位置重復性測試。
1 測試標準及方法
GB/T 12642-2013 標準對位姿重復性給出了明確的定義,即對同一指令位姿從同一方向重復響應n次后實到位姿的一致程度[5]。定義中的位姿包括姿態重復性和位置重復性,本文僅對位置重復性進行討論。
如圖1所示,位置重復性:

其中:

圖1 位置重復性

通過分析式(1)~(5)可知,位置重復性的計算不涉及指令位姿所給定的坐標值。這使得位置重復性的測試只需用到測量系統的坐標系,不涉及機器人的機座坐標系,無需進行測量系統坐標系與機器人機座坐標系之間復雜的坐標變換。而如果進行位置準確度的測試,則需要進行坐標變換,因此相對而言位置重復性測試更簡單更好操作。
2 測量儀器
近年來,國內外學者及研究機構在工業機器人性能評估領域做了大量研究,探索了很多測試方法,包括拉線式位移傳感器測試、相機跟蹤測試、超聲波測試、三坐標測量法、參考軌跡測量法和激光跟蹤儀測試等[6-7]。其中最為常見的測試方法是激光跟蹤儀測試[8]。
早在20世紀80年代,國外就開展了激光跟蹤儀測量技術的研究,并有相應的產品問世。近年來,隨著科技的發展和技術的進步,激光跟蹤儀的準確度、穩定性、測量范圍、便攜性得到極大地提升,在制造、服務、工程、質量控制以及檢測等領域得到廣泛地應用。2019 年9 月在國家認監委舉辦的工業機器人位置重復性測試技能競賽中,來自全國12個省(市)的25 家檢驗檢測機構全部采用激光跟蹤儀作為測量設備。激光跟蹤儀是工業機器人性能測試領域必不可少的檢測儀器。
一套激光跟蹤儀測試系統包括激光跟蹤儀、靶球、計算機及相關測試軟件、工裝夾具等,如圖2所示。

圖2 激光跟蹤儀測試系統
3 測試流程
依據GB/T 12642-2013標準要求,基于激光跟蹤儀的工業機器人位置重復性測試流程如圖3所示。

圖3 位置重復度測試流程
3.1 激光跟蹤儀測試系統搭建
激光測量頭需安裝在穩固的支架上,并處于工業機器人作業空間之外,保證測量頭在一定偏轉角度內就能采集到所有的位置數據。靶球借助工裝夾具固定在機器人末端。將控制器與測量頭、控制器與氣象站、控制器與上位機的可靠連接。
3.2 激光跟蹤儀預熱及校準
激光跟蹤儀測試系統搭建完成后,給系統上電,激光跟蹤儀立即開始預熱,即進入“熱穩定”階段。在預熱過程中,測量頭內部軸結構會改變形狀,直到所有結構零件的溫度達到穩定均勻,以適應工作溫度和所需的穩定幾何結構。預熱結束后,再對激光跟蹤儀進行校準。預熱和校準皆是為保證激光跟蹤儀測量精度所采取的必要措施。
3.3 測量點確定
位置重復度測試需要5個測量點,根據標準要求,這5個測量點需通過工業機器人工作空間中立方體內一平面上的5個合適位置點經過偏移得到。
3.3.1 立方體
立方體應位于工作空間中預期應用最多的那一部分,即工業機器人末端活動最頻繁的區域。同時,立方體應具備最大的體積,并且棱邊與基座坐標系平行[5]。
3.3.2 選用平面
選用平面在立方體(C1-C2-C3-C4-C5-C6-C7-C8)內部,如圖4所示,任意選取其中一個平面即可。

圖4 選用平面
3.3.3 示教點與測量點
編程示教過程中,是對機械接口的中心點(即法蘭中心點)進行操作示教。而激光跟蹤儀在采集坐標位置時,獲取的是靶球中心點的坐標值,顯然示教點和測量點不同。根據標準要求,5個示教點應位于選用平面的對角線上,其中1個點為對角線的中心點,其他4個點離對角線端點的距離等于對角線長度的10%±2%,如圖5所示。為滿足位置重復性測試要求,機器人示教時需要通過末端姿態控制,保證每對測量點和示教點之間一樣的相對位置關系是一樣的,即末端的機械接口姿態相對于選用平面保持不變。
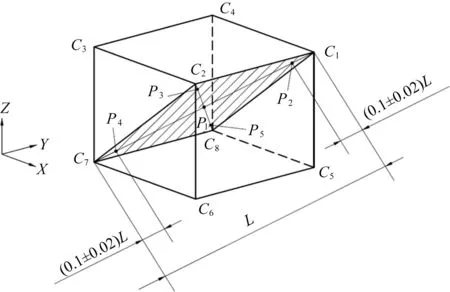
圖5 示教點
按照確定的工業機器人工作空間的立方體以及選取的選用平面,可計算出示教點P1、P2、P3、P4、P5在機座坐標系中的坐標值。
3.4 機器人示教
通過計算出來的P1~P5的坐標值,對工業機器人進行示教編程,使得末端的機械接口以P1點為起始點,按順序移至P5、P4、P3、P2、P1,并且在每一示教點處停頓 3~5 s,以便于激光跟蹤儀能夠采集準確的坐標值。P5~P1為一個循環,總共設置30個循環。
3.5 測試及數據處理
以上步驟準備完成后,啟動激光跟蹤儀和機器人開始測試。共采集30 組150 個坐標數據值,導出數據值,按式(1)~(5)進行數據處理,即可得到P5、P4、P3、P2及P1五個位置點的位置重復性測量值。在50%額度速度下,測試結果如表1所示。

表1 位置準確度
4 影響因素
為保證位置重復度的測量準確性,需考慮環境、設備等因素可能產生的影響。環境方面,測量現場須遠離振動源,如施工工地、大型起重設備、車流密集的馬路、振動試驗場所等。最好機器人和激光跟蹤儀能安放在隔振地面上。設備方面,測試前機器人和激光跟蹤儀要進行充分地預熱并達到熱穩定狀態,靶球與機器人的連接須緊固不松動。此外,激光跟蹤儀要進行充分校準,避免因運輸、安裝等原因對測量設備產生的精度影響。
5 結束語
位置重復性是工業機器人性能測試中的一個基本測試項,是衡量工業機器人質量水平的重要指標之一。本文主要介紹了工業機器人位置重復性測試的方法,以及用激光跟蹤儀實現測試的流程。通過搭建激光跟蹤儀測試系統,能夠高效、準確地實現工業機器人位置重復性測試,極大地降低測試難度并提高測試精度,是當前工業機器人性能測試應用最廣泛的測量手段。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
