一種橋式起重機(jī)防搖控制實(shí)驗(yàn)平臺(tái)設(shè)計(jì)與分析*
2020-11-27 10:04:44邱光繁李汶杰邱炯智黃曉存張京玲王天雷
機(jī)電工程技術(shù) 2020年10期
邱光繁,李汶杰,邱炯智,黃曉存,張京玲,王天雷※
(1.江門市蒙德電氣股份有限公司,廣東江門 529000,2.五邑大學(xué)智能制造學(xué)部,廣東江門 529000;3.恩平市奧達(dá)電子科技有限公司,廣東江門 529030)
0 引言
在各領(lǐng)域的工程建設(shè)、生產(chǎn)車間,橋式起重機(jī)被廣泛應(yīng)用于搬運(yùn)重物,對(duì)其控制主要是將貨物安全、快速、準(zhǔn)確地搬到目標(biāo)位置。但由于工作環(huán)境復(fù)雜,人工操作不可避免地造成被吊物搖擺,加速機(jī)械磨損,增加吊物轉(zhuǎn)運(yùn)時(shí)間,效率較低,且事故時(shí)有發(fā)生。圖1所示為常見(jiàn)的橋式起重機(jī)。
基于上述原因,多種防搖控制策略已開(kāi)發(fā)并用于橋式起重機(jī)的防搖系統(tǒng),有效地降低了吊物運(yùn)轉(zhuǎn)過(guò)程中的擺動(dòng),使起重機(jī)運(yùn)行更加高效、安全[1]。
對(duì)防搖系統(tǒng)基本要求:被吊物應(yīng)能精確定位;運(yùn)行過(guò)程中擺角盡量小,在到達(dá)目標(biāo)位置前吊物應(yīng)停止搖擺。目前,防搖擺控制技術(shù)可分為機(jī)械防搖擺和電子防搖擺。電子式防搖是通過(guò)各種傳感器和檢測(cè)元件將檢測(cè)到的信息,如吊物的擺角、吊車運(yùn)行速度、吊車的位移和吊物起升高度等,傳送至控制系統(tǒng),系統(tǒng)處理后將最佳的控制參數(shù)定量。通過(guò)調(diào)節(jié)吊車速度,提供最佳策略控制起重機(jī)的運(yùn)行,減小吊具及吊物的擺角[2]。

圖1 橋式起重機(jī)
1 防搖實(shí)驗(yàn)平臺(tái)
1.1 基本要求
設(shè)計(jì)一種防搖控制實(shí)驗(yàn)平臺(tái)為教學(xué)、科研服務(wù),即對(duì)各種防擺控制算法在Matlab/Simulink 實(shí)現(xiàn)后,進(jìn)一步在該平臺(tái)上進(jìn)行實(shí)驗(yàn)測(cè)試,以便為其實(shí)際應(yīng)用提供可靠依據(jù)。按相似原理設(shè)計(jì),即實(shí)驗(yàn)平臺(tái)基本結(jié)構(gòu)參考實(shí)際橋式起重機(jī),基本尺寸按比例縮小。設(shè)計(jì)的實(shí)驗(yàn)平臺(tái)如圖2所示。

圖2 橋式起重機(jī)防搖控制實(shí)驗(yàn)平臺(tái)
1.2 工作過(guò)程
如圖3 所示,工作過(guò)程為:通過(guò)計(jì)算機(jī)的控制界面發(fā)出指令實(shí)現(xiàn)控制卡對(duì)電機(jī)控制,包括電機(jī)正反轉(zhuǎn)、運(yùn)行距離/速度/時(shí)間/加速度大小和加速時(shí)間,電機(jī)帶動(dòng)滾珠絲杠驅(qū)動(dòng)小車移動(dòng),在移動(dòng)過(guò)程中被吊物產(chǎn)生的擺角可實(shí)時(shí)測(cè)出,并將信號(hào)反饋,經(jīng)運(yùn)動(dòng)控制卡輸入到控制界面,進(jìn)而達(dá)到實(shí)時(shí)控制小車的運(yùn)動(dòng),從而達(dá)到防搖的目的。系統(tǒng)控制維數(shù)說(shuō)明:一維控制為僅控制小車沿X 方向運(yùn)動(dòng);二維控制是同時(shí)控制小車移動(dòng)和升降裝置升降負(fù)載;三維控制為同時(shí)控制小車沿X、Y方向移動(dòng)以及升降裝置升降負(fù)載。

圖3 實(shí)驗(yàn)平臺(tái)結(jié)構(gòu)示意圖
1.3 實(shí)驗(yàn)平臺(tái)主要硬件
平臺(tái)采用固高GTS-VB運(yùn)動(dòng)控制卡,該控制卡是以PCI總線為基礎(chǔ)、以ASIC 為核心,可實(shí)現(xiàn)4 軸伺服電機(jī)和步進(jìn)電機(jī)的多軸點(diǎn)位控制,另帶有編碼器位置檢測(cè)等復(fù)雜功能;選用MR-E-100A 伺服放大器,其具有保護(hù)電路、正弦波PWM 控制、電流控制系統(tǒng)等功能,可以使整套系統(tǒng)得到更好地控制;擺角測(cè)量裝置是通過(guò)旋轉(zhuǎn)編碼器和機(jī)械結(jié)構(gòu)共同組成,具有安裝方便、測(cè)量精度高等特點(diǎn);采用三菱伺服電機(jī)和滾珠絲桿副能實(shí)現(xiàn)運(yùn)動(dòng)狀態(tài)的高精控制,滿足實(shí)驗(yàn)裝置運(yùn)動(dòng)要求。
1.4 系統(tǒng)軟件
防搖實(shí)驗(yàn)系統(tǒng)的控制算法輸出的控制量為一個(gè)數(shù)字量。因此,需要調(diào)用的運(yùn)動(dòng)控制方法函數(shù)要能夠完成數(shù)模轉(zhuǎn)換輸出,使被控對(duì)象進(jìn)行相應(yīng)地運(yùn)動(dòng)。本設(shè)計(jì)中用到的運(yùn)動(dòng)控制方法函數(shù)原型為:gts.mc.GT_SetDac(short dac, short *pValue,short count),其中,dac參數(shù)為運(yùn)動(dòng)控制卡所控制的對(duì)象的起始軸號(hào),pValue參數(shù)為輸出的電壓(-32 768對(duì)應(yīng)-10 V,32 767對(duì)應(yīng)+10 V),count參數(shù)為所要控制的軸的數(shù)量。綜合對(duì)橋式吊車負(fù)載防擺系統(tǒng)的介紹和給出的上位機(jī)軟件基本功能分析,經(jīng)過(guò)細(xì)化后,得到如圖4所示的上位機(jī)軟件詳細(xì)功能框圖。

圖4 上位機(jī)軟件詳細(xì)功能框圖
1.5 仿真實(shí)例
二維橋式起重機(jī)防搖系統(tǒng)的算法仿真動(dòng)力學(xué)模型[3]如圖5 所示。小車質(zhì)量為M,水平方向的牽引力F 及阻力f,阻力系數(shù)為μ;負(fù)載質(zhì)量為m,繩索長(zhǎng)度為l。忽略繩索的質(zhì)量、繩的彈性形變、空氣阻力、風(fēng)力、吊繩與臺(tái)車連接處的摩擦力等。建立坐標(biāo)系,設(shè)負(fù)載與臺(tái)車的坐標(biāo)分別為(xm,ym),(xM,yM),負(fù)載擺角為θ、繩長(zhǎng)為l、水平方向位移為x。將仿真參數(shù)值輸入該系統(tǒng),進(jìn)行PID 控制、模糊控制和模糊PID 控制對(duì)比仿真分析,圖6所示為所得仿真曲線。

圖5 橋式起重機(jī)二維力學(xué)模型

圖6 仿真對(duì)比分析結(jié)果在上位機(jī)的顯示
2 平臺(tái)機(jī)架的有限元分析
機(jī)架是支撐小車、負(fù)載(起吊物)和電機(jī)等的平臺(tái),對(duì)其設(shè)計(jì)要求為:(1)足夠的強(qiáng)度;(2)良好的動(dòng)力學(xué)特性[4]。因而作以下分析。
在Solidwork 中建立機(jī)架三維模型,并進(jìn)行一定的簡(jiǎn)化,導(dǎo)入ANSYS Workbench 中對(duì)進(jìn)行有限元分析,采用六面體自由網(wǎng)格劃分。機(jī)架材料為6061 鋁合金型材,彈性模量E=69 GPa,泊松比μ=0.33,密度ρ=2.71 g/cm3,最小屈服極限55.2 MPa;極限抗拉強(qiáng)度124 MPa;彎曲極限強(qiáng)度228 MPa。施加載荷為小車質(zhì)量5 kg,重物質(zhì)量10 kg,用Mass21質(zhì)量單元代替小車和重物的質(zhì)量添加在軌道中心節(jié)點(diǎn)位置,方向Z 軸負(fù)向,大小為625 N。有限元模型、網(wǎng)格模型、載荷及邊界約束如圖7所示。機(jī)架與地面接觸處進(jìn)行固定約束,即6個(gè)自由度均進(jìn)行約束。采用Solid187單元進(jìn)行仿真。

圖7 網(wǎng)格模型、載荷及邊界約束
2.1 靜力學(xué)分析
如圖8(a)所示,最大應(yīng)力為31.70 MPa,小于屈服極限,滿足要求。圖8(b)所示為位移云圖,在主梁中部最大位移量為0.117 mm,基本滿足設(shè)計(jì)要求。

圖8 靜力學(xué)分析
2.2 模態(tài)分析
模態(tài)分析是基于多自由度系統(tǒng)以某一固有頻率振動(dòng)時(shí)所呈現(xiàn)的振動(dòng)形態(tài)稱為模態(tài),此時(shí)系統(tǒng)各點(diǎn)位移存在一定比例關(guān)系,稱為固有振型。不論何種阻尼情況,機(jī)械結(jié)構(gòu)對(duì)外力的響應(yīng)都可表示為由固有頻率、阻尼比和振型等模態(tài)參數(shù)組成的各階振型模態(tài)的疊加。系統(tǒng)運(yùn)動(dòng)微分方程為:

式中:[M]為質(zhì)量矩陣;[C]為阻尼矩陣;[K]為剛度矩陣;分別為系統(tǒng)的加速度、速度和位移;{F}為載荷向量。
求解系統(tǒng)的固有頻率和固有振型時(shí),由于結(jié)構(gòu)的阻尼對(duì)其模態(tài)頻率及振型的影響很小,可忽略。
系統(tǒng)的自由振動(dòng)方程可簡(jiǎn)化為:

式中:{φ}為位移矢量的幅值;ω為角頻率。
將式(3)代入式(2)得:

式(4)在任何時(shí)刻t均成立,除去含t的項(xiàng)得:

由線性代數(shù)方程組有非零解的充分必要條件:

如平臺(tái)機(jī)架動(dòng)力學(xué)特性不理想,其機(jī)架部分可能產(chǎn)生振動(dòng),影響負(fù)載精準(zhǔn)定位的實(shí)現(xiàn)和擺角的降低[5]。本文采用模態(tài)分析方法,具體步驟如圖9所示。
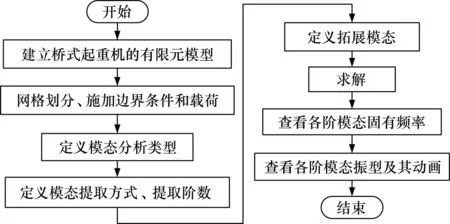
圖9 模態(tài)分析流程框圖
本次分析采用的是子空間法,分析前6 階模態(tài)如圖10 所示,對(duì)應(yīng)的固有頻率與振型描述如表1所示。
2.3 激勵(lì)源分析

圖10 平臺(tái)機(jī)架前6階模態(tài)振型

表1 前6階固有頻率
防搖實(shí)驗(yàn)平臺(tái)工作時(shí),伺服電機(jī)驅(qū)動(dòng)滾珠絲桿帶動(dòng)小車沿滾動(dòng)導(dǎo)軌移動(dòng),由于伺服電機(jī)轉(zhuǎn)子不可避免地存在質(zhì)心偏離,電機(jī)運(yùn)行時(shí)所產(chǎn)生的振動(dòng)激勵(lì)可能影響平臺(tái)工作性能。
以伺服電機(jī)安裝平臺(tái)機(jī)架為研究對(duì)象,對(duì)其動(dòng)態(tài)特性開(kāi)展研究,分析最大響應(yīng)點(diǎn)隨激勵(lì)頻率的變化規(guī)律,確定工裝平臺(tái)的振動(dòng)敏感區(qū)域[6]。為其結(jié)構(gòu)的改進(jìn)與優(yōu)化提供理論依據(jù)。
激勵(lì)源分析如下。
(1)設(shè)計(jì)的伺服電機(jī)在進(jìn)行實(shí)驗(yàn)測(cè)試時(shí)轉(zhuǎn)速為1 000 ~2 000 r/min,對(duì)應(yīng)旋轉(zhuǎn)產(chǎn)生的激勵(lì)頻率為16.67~33.34 Hz,如表2所示。

表2 機(jī)架2個(gè)激勵(lì)源數(shù)據(jù)
(2)橋式起重機(jī)系統(tǒng)是一種強(qiáng)耦合、非線性的吊擺系統(tǒng)[7],為使防搖系統(tǒng)實(shí)現(xiàn)快速定位和控制移動(dòng)過(guò)程中負(fù)載擺角最小[8],采用各種控制策略和算法均要求頻繁變換伺服電機(jī)工作時(shí)輸出轉(zhuǎn)矩,與之對(duì)應(yīng)的角加速度變換周期為50~100 ms,所生產(chǎn)的扭轉(zhuǎn)激勵(lì)可能導(dǎo)致機(jī)架產(chǎn)生顫抖,影響小車準(zhǔn)確定位和對(duì)負(fù)載繩索擺角的控制。加速度變換周期及對(duì)應(yīng)的變換頻率如表2所示。
2.4 實(shí)驗(yàn)結(jié)果分析與改進(jìn)建議
(1)參看表1~2 可得,機(jī)架的3 階和4 階固有頻率分別為19.622 Hz、30.611 Hz,在電機(jī)旋轉(zhuǎn)激勵(lì)頻率范圍內(nèi)。建議改進(jìn)機(jī)架結(jié)構(gòu),如增設(shè)肋板、加強(qiáng)筋等,或選用剛度較高的材料,提高其固有頻率。
(2)表1 所列的1 階和2 階固有頻率分別為11.425 Hz、12.651 Hz,對(duì)應(yīng)在電機(jī)由啟動(dòng)到達(dá)設(shè)計(jì)的工作轉(zhuǎn)速范圍內(nèi),建議在控制系統(tǒng)中設(shè)置跳頻處理,避開(kāi)這些敏感頻率段。
(3)防搖算法中對(duì)加速度變換頻率在10~20 Hz 范圍內(nèi),所生產(chǎn)的扭轉(zhuǎn)激勵(lì)理論上不會(huì)對(duì)機(jī)架共振產(chǎn)生影響。
3 結(jié)束語(yǔ)
(1)為方便教學(xué)和驗(yàn)證各種防搖控制方法的實(shí)際效果,設(shè)計(jì)并搭建了一個(gè)三維橋式起重機(jī)防搖控制實(shí)驗(yàn)平臺(tái),可為控制策略和算法的教學(xué)提供幫助,也可對(duì)各種仿真結(jié)果進(jìn)行測(cè)試驗(yàn)證。
(2)根據(jù)平臺(tái)機(jī)架模態(tài)分析結(jié)果,對(duì)比伺服電機(jī)作為激勵(lì)源的激勵(lì)頻率,結(jié)果表明,機(jī)架剛度需進(jìn)一步加強(qiáng);低頻段的11.425 Hz、12.651 Hz,對(duì)應(yīng)在電機(jī)啟動(dòng)到設(shè)計(jì)的正常運(yùn)行的工作轉(zhuǎn)速范圍內(nèi),建議在控制系統(tǒng)中設(shè)置跳頻處理。以上分析結(jié)果,可為實(shí)驗(yàn)平臺(tái)的改進(jìn)設(shè)計(jì)提供依據(jù)。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39
