超高層建筑電梯導軌整體鉛垂度的測量方法分析
2020-11-29 14:06:12賈寧寧袁衛華
機電信息 2020年33期
賈寧寧 袁衛華
(南通科技職業學院機電與交通工程學院,江蘇南通226007)
0 引言
隨著我國經濟快速發展,城市中超過百米的建筑星羅棋布、鱗次櫛比。建筑物高度超過100 m或40層時,不論住宅還是公共建筑均為超高層[1]。這些超高建筑都配備了安全、舒適的電梯。電梯轎廂導軌是安裝在電梯井道中或樓層之間的兩列垂直的剛性軌道,是轎廂行駛在井道中的安全軌道,為保障電梯安全運行和運行質量的重要部件。根據GB/T 10060—2011《電梯安裝驗收規范》5.2.5.5規定,電梯安裝后每列導軌工作面(包括側面與頂面)相對安裝基準線每5 m長度內的偏差均不應大于下列數值:(1)轎廂導軌和裝設有安全鉗的對重導軌為0.6 mm;(2)不設安全鉗的T型對重導軌為1.0 mm。對于鉛垂導軌的電梯,電梯安裝后檢驗導軌時,可對每5 m長度相對鉛垂線分段連續監測(至少測3次),取測量值間的相對最大偏差,其值不應大于上述規定值的2倍[2]。
1 測量方法
1.1 重錘直接測量法
掛重錘測量是一種傳統的測量方法。根據GB/T 10060—2011《電梯安裝驗收規范》5.2.5.5規定,先5 m分段測量,記錄數據,應均小于0.6 mm;然后從頂層導軌懸掛重錘,掛到底層,測量讀數,應不小于1.2 mm。此方法對于普通高度建筑比較適用,但對于超高層建筑,由于重錘的懸掛高度太大、建筑最高層本身的擺動、井道內風力的影響等因素會造成最下方的重錘擺動幅度非常大,極難測量。有時會采用加大重錘重量、將重錘置于液體中等方法,來減少重錘的擺動幅度,得到比較正確的測量值。此種測量方法雖然測量設備簡單,但可操作性差,測量結果誤差也大,在超高層建筑電梯導軌驗收時并不推薦使用。
1.2 重錘計算法
同樣先掛重錘直接分段測量,記錄每5 m長度內的偏差數值,然后以記錄的數值為依據,通過計算可得出整體鉛垂度。重錘直接分段測量原始數據示例如表1所示。
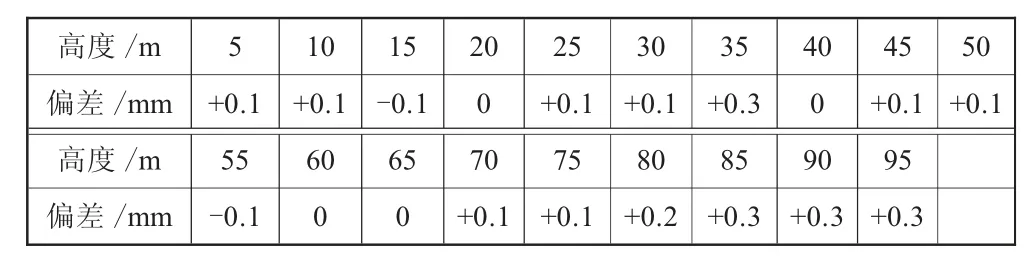
表1 重錘直接分段測量原始數據
注意:表1中記錄的偏差數據值應均小于0.6 mm才合格,若表1中偏差數據值大于0.6 mm,需要對安裝導軌進行調整。
將表1中的偏差原始數據,后一偏差數據在前一數據基礎上進行累加計算即可得到重錘計算法計算后數據表。具體數值如表2所示。
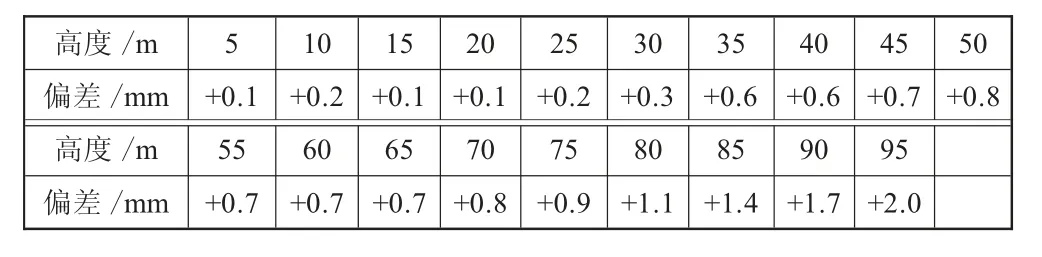
表2 重錘計算法計算后數據表
通過偏差累加計算整理后可得出導軌整體鉛垂度的最大值為2.0 mm,超過規定1.2 mm,所以此次電梯導軌安裝垂直度不合格,需對導軌進行調整。此方法測量設備簡單,操作方便,測量結果也較為準確。
1.3 激光垂準儀測量法
該方法使用高精度的激光束代替傳統的人工吊線,使測量精度得到很大提高。激光垂準儀為測量電梯導軌垂直度提供了一個高精度的測量基準,減少了由于基準精度低帶來的測量誤差。用該測量方法仍需要按標準規定人工測量,每5 m分段測量并記錄數值。激光垂準儀測量示例如表3所示。
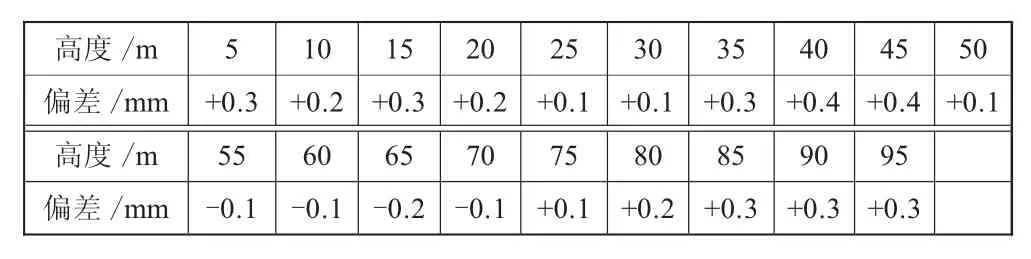
表3 激光垂準儀測量原始數據表
判斷此導軌安裝垂直度是否合格需要判定每5 m的偏差值不大于0.6 mm,且導軌的整體鉛垂度不大于1.2 mm。
導軌的整體鉛垂度的計算方法為:取表中導軌偏差數值最大正值與最大負值,兩數值之差為導軌整體鉛垂度值。表中偏差最大值為+0.4 mm,最小值為-0.2 mm,則此導軌的整體鉛垂度值為:+0.4-(-0.2)=0.6 mm。
對照規范,導軌每5 m的偏差值小于0.6 mm且導軌的整體鉛垂度值小于1.2 mm,所以導軌鉛垂度合格。此種測量儀價格適中,設備簡單易操作。
1.4 全自動激光儀測量法
針對目前電梯導軌垂直度檢測設備自動化程度不高等問題,很多專家學者正在研究新的全自動檢測機器人。
張浩研制出一種沿導軌自主垂直運行的機器人系統[3],機器人系統能夠攜帶測量儀器沿導軌面運行,實現導軌垂直度的自動在線監測。檢測原理為以激光自動安平垂準儀發出的激光為基準,緊貼導軌運行的接收裝置上的光斑經CCD相機和圖像采集卡采集到計算機后,通過計算機圖像處理識別出光斑中心的位移量來確定電梯導軌在測量位置的垂直度偏差,同時自動記錄測量所在位置。對閾值分割后的光斑圖像進行自動識別,若為圓形光斑,利用質心公式求其中心;若為圓環光斑,邊緣檢測后,利用霍夫變換求其中心。對于圓的霍夫變換,通過對圓方程求導可把三維參數空間降低為二維處理,大大降低了運算量……此種測量儀可直接得到鉛垂度數據,方便快捷,但價格較高,設備較多,對操作者要求也較高。
黃偉華提出了激光三角法[4],該方法將激光投射到導軌表面,利用激光反射完成物體呈像,當物體表面發生改變時,檢測器上的圖像也會產生相應的位移,利用圖像位移與物體實際位移時間的關系,可以計算獲得真實的物體位移。該方法可能受到井道內其他物體反射光的影響,且設備復雜,安裝過程復雜,測量步驟繁瑣,效率較低。
劉旭等人設計了一款能夠獨立沿導軌運行的機器人[5],該方法避免了建立檢測基準,提高了檢測效率和檢測精度。但導軌面有附著物、導軌面垂直度誤差等外界因素會使機器人出現振動,使測量精度下降。
2 幾種測量方法的優缺點
(1)傳統重錘直接測量或重錘計算法的優點:設備簡單,安裝方便,成本低;
缺點:測量誤差大,檢驗效率偏低,耗時較長,作業強度大,存在安全風險等。
(2)激光垂準儀測量法的優點:設備成本較低,使用方便;
缺點:和傳統重錘法相比其檢測精度提高,但仍需大量人工參與,檢測效率低,誤差大。
(3)全自動激光儀測量法的優點:自動化程度高,效率高,檢測精度高;
缺點:設備成本高,集成度和自動化程度低,目前技術仍不成熟,設備使用和推廣仍有局限性,需要繼續改進。
3 總結與展望
綜上所述,超高層建筑電梯導軌整體鉛垂度測量有重錘直接測量法、重錘計算法、簡易激光儀測量法、全自動激光儀測量法,其各有優缺點,測量時可根據環境、條件、人員等因素選用。
目前的電梯導軌垂直度檢測方法仍存在設備集成度低、方法繁瑣、時間長、精度低等缺點,需要大量的人工參與,增加了安裝與調試成本。未來,新型設備的研制方向為提高測量系統的自動化程度及測量精度。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
工業設計(2016年12期)2016-04-16 02:52:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
小說月刊(2015年4期)2015-04-18 13:55:18
