基于粒子群算法的車輛半主動懸架模糊PID控制的優化研究
2020-12-02 04:25:52,,
機械與電子 2020年11期
,,
(1.青島科技大學機電工程學院,山東 青島 266061;2.一汽解放青島汽車有限公司,山東 青島 266043)
0 引言
道路的不平整會引起汽車在行駛過程中的不規則振動,對汽車的行駛平順性和操縱穩定性有很大的副作用。此外,車輪與地面之間會產生動載荷,也影響車輛行駛穩定性。懸架可以將車架與車軸彈性地連接起來,如果路面不平引起一定程度的振動,懸架可以起到緩沖作用,減弱從輪胎傳遞到車身的振動。相較于主動懸架,半主動懸架具有價格較低、技術要求較低、可靠性高的優點,在現代車輛上廣泛應用。半主動懸架可根據路面狀況和汽車響應特性對可控阻尼的阻尼力進行適時調節,使懸架在各種路面情況下達到最佳減振效果。
為了得到性能更好的半主動懸架,王威等[1]以車身垂直振動加速度為控制目標,將遺傳算法與模糊PID控制策略融合,有效減小了車身垂直振動加速度。楊柳青等[2]在電磁閥減振器力-速度特性試驗基礎上,提出一種基于輸入飽和的滑模控制策略,車輛的垂向特性得到有效改善。郭全民等[3]利用粒子群算法的并行全局搜索能力對PID控制參數KP、KI、KD進行整定,以此來改善汽車半主動懸架PID控制的性能。嚴天一等[4]利用粒子群優化算法對模糊混合控制器的隸屬度函數和模糊控制規則同時進行優化,提高了半主動懸架系統的綜合性能。趙強等[5]利用遺傳算法的全局優化能力和并行能力優化模糊PID控制器的量化因子及其PID參數的修正系數,得到一組最佳的PID參數。Cao等[6]針對汽車半主動懸架系統,提出了一種基于區間模糊隸屬函數的擴展模糊邏輯控制器,對半車主動懸架系統的仿真研究表明,該控制器的性能優于傳統的模糊邏輯控制器。Liu等[7]提出了一種新的主動跟隨模糊輸出反饋滑模控制方法,用于實際車輛半主動懸架系統。樓少敏等[8]基于滑模理論設計了7自由度的整車半主動懸架系統的滑模控制器,懸架性能得到大幅提升。本文利用粒子群算法的全局并行搜索能力對模糊PID控制器進行優化,并對比分析在相同路面情況與行駛速度下,不同控制器對懸架性能的優化效果。
1 動力學模型建立
1.1 半主動懸架模型建立
1/2車輛動力學模型具有4個自由度,分別是前輪垂向位移、后輪垂向位移、車身垂向位移及車身俯仰運動。1/2車動力學模型如圖1所示。
1/2車輛半主動懸架數學模型為
(1)
其中
(2)
圖1和式(1)、式(2)中,k1f為前輪剛度系數;k1r為后輪剛度系數;m1f為前輪非簧載質量;m1r為后輪非簧載質量;c2f為前懸架阻尼;c2r為后懸架阻尼;k2f為前懸架剛度;k2r為后懸架剛度;f1f為前懸架可控阻尼;f1r為后懸架可控阻尼;m2為車身質量;I為轉動慣量;L為軸距;L1為車身質心到前軸的距離;L2為車身質心到后軸的距離;x3為車身質心的垂直位移;x1f為前懸架非簧載質量垂直方向的位移;x1r為后懸架非簧載質量垂直方向的位移;x2f為前車身垂向位移;x2r為后車身垂向位移;x0f為前輪的路面不平度;x0r為后輪的路面不平度;F1r為后懸架彈簧力;F1f為前懸架彈簧力。其中,各個參數數值如表1所示。
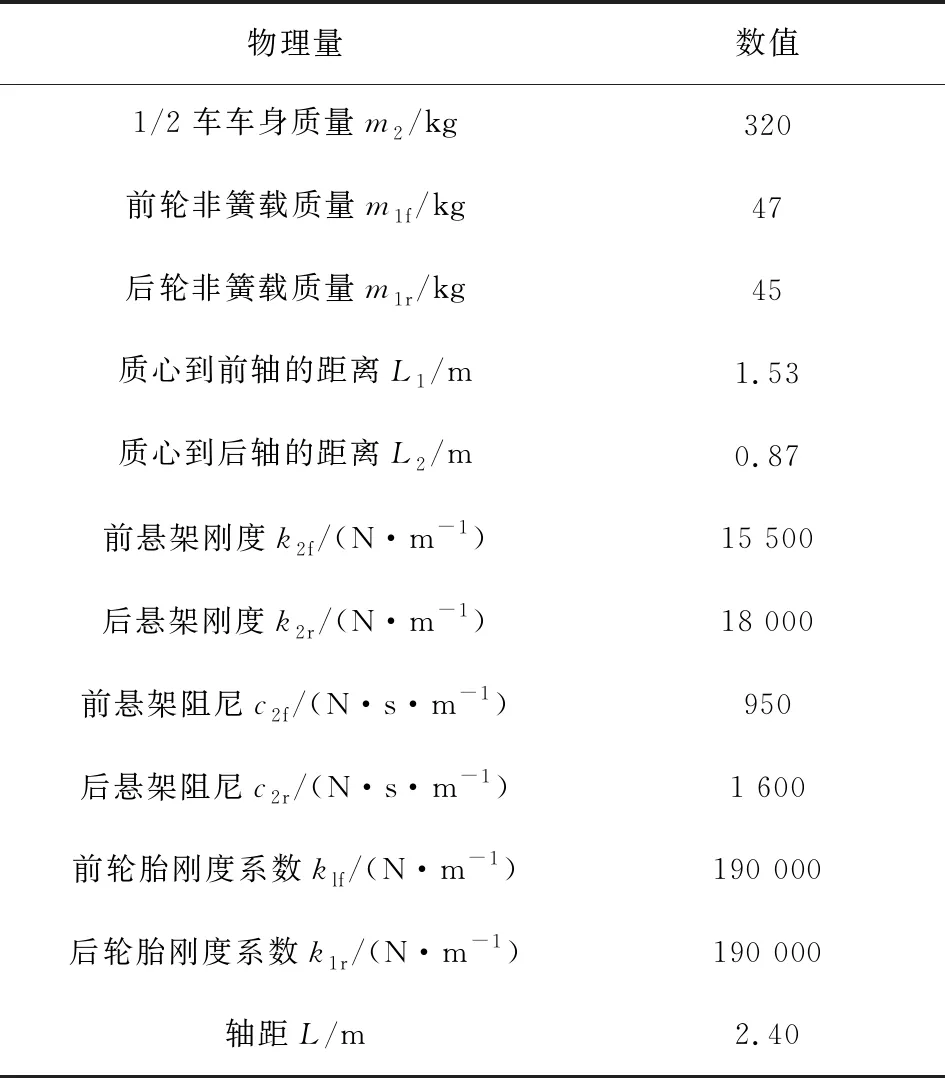
表1 1/2車輛懸架參數
1.2 路面模型建立
本文使用有限帶寬白噪聲法建立路面Simulink模型。其中隨機路面輸入函數表達式為
(3)
n0為參考空間頻率,取值0.1 m-1;Gq(n0)為路面不平度系數,本文選取B級路面,其數值為64×10-6m3;v為行駛速度,本文取行駛速度為30 km/h;w(t)為白噪聲。路面Simulink模型如圖2所示。
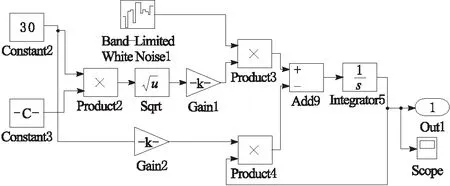
圖2 路面Simulink模型
2 模糊PID控制系統
2.1 PID控制器結構
傳統的PID控制器由比例(P)、積分(I)和微分(D)組成,首先根據系統的偏差,利用上述3個分量計算控制量,然后進行控制。它具有控制結構和算法簡單、穩定性好、精度高、響應速度快、適應性廣等特點,在工業控制領域得到了廣泛的應用。
2.2 Fuzzy-PID控制器結構
Fuzzy-PID主要由傳統PID控制器和模糊化模塊組成。在數據分析和參數選擇上,模糊自適應PID控制可以在原算法的基礎上,通過輸入誤差變化率ec和誤差e,并用模糊規則推斷參數,找到相應的矩陣并進行分析。1/2車輛半主動Fuzzy-PID控制懸架是用2個模糊PID控制器分別控制前懸架和后懸架,在傳統PID控制器的基礎上,采用模糊邏輯推理對PID參數進行調整,并采用PID算法得到系統輸出[9]。1/2車輛半主動懸架系統Fuzzy-PID控制器結構如圖3所示。
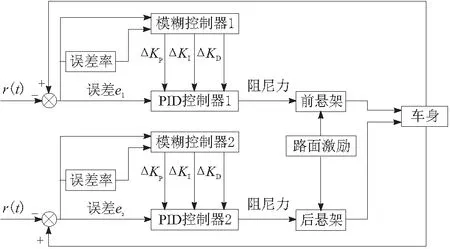
圖3 模糊控制PID結構
2.3 模糊控制規則設置
將系統誤差e的變化范圍設置為[-6,6],誤差變化率ec的變化范圍為[-3,3],然后建立模糊控制規則表,分別如表2、表3和表4所示。
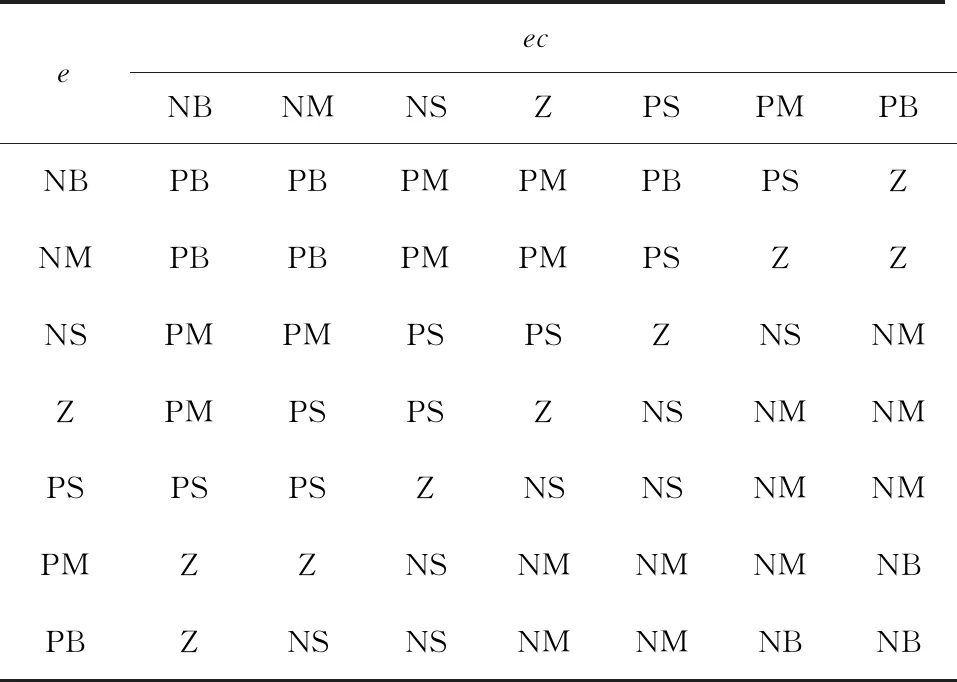
表2 ΔKP模糊控制規則
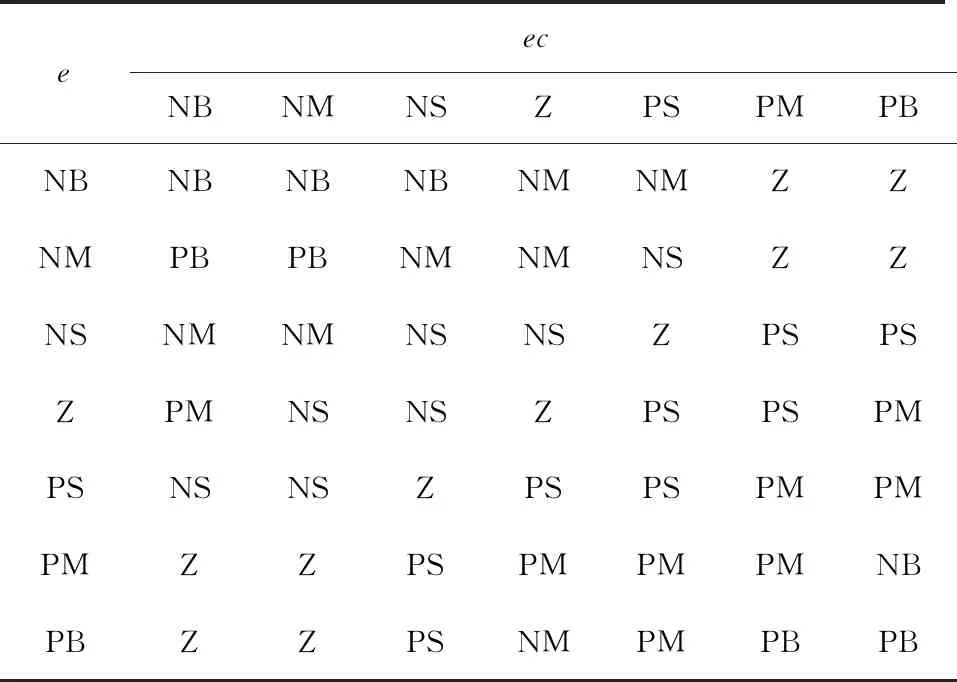
表3 ΔKI模糊控制規則
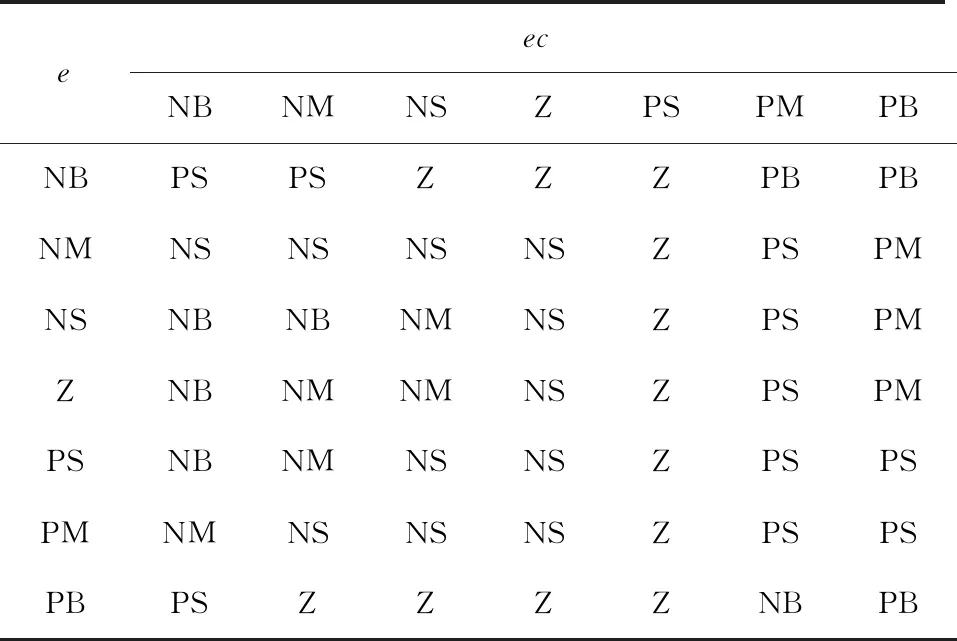
表4 ΔKD模糊控制規則
3 基于粒子群算法優化模糊PID控制器

(4)

粒子群中的粒子在空間中的位置、速度更新表達式為:
vj(t+1)=ωvj+c1r1[Pj(t)-xj(t)]+c2r2[Pw(t)-xj(t)]
(5)
xj(t+1)=xj(t)+vj(t+1)
(6)
ω為慣性權數;c1和c2為加速系數;r1和r2為0~1范圍內的隨機數。
粒子群算法對懸架系統的模糊PID控制器優化流程如圖4所示。
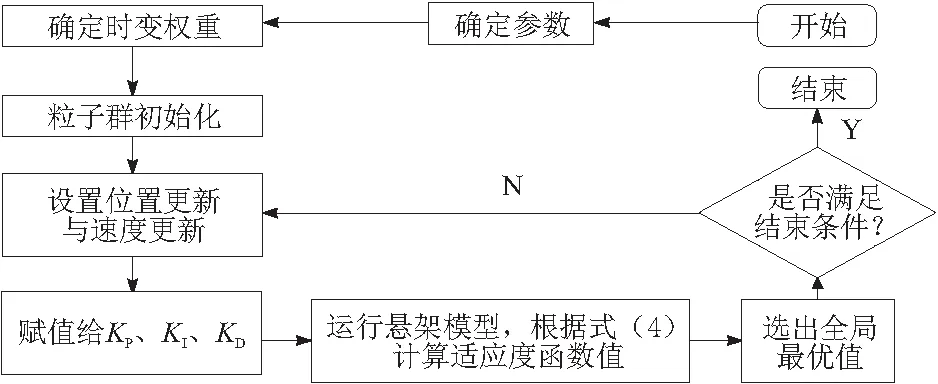
圖4 模糊PID控制器優化流程
a.確定的參數值包括慣性因子、加速常數、維粒子群規模、最大迭代次數、最小適應值。
b.確定時變權重。時變權重的確定公式為
w(i)=wmax-i(wmax-wmin)/G
(7)
wmax與wmin為權重的最大值與最小值;i為迭代次數;G為最大迭代次數。
c.粒子群初始化。設置粒子群體規模為n搜索范圍為一個S維的目標搜索空間中,其中第i個粒子可表示為
Xi=(xi1,xi2,xi3,…,xiS),i=1,2,3,…,n
(8)
每一個粒子的位置都是一個潛在的解,將Xi代入目標函數即可計算出其適應值,根據適應值的大小衡量解的優劣。粒子最初的飛行速度表示為
vi=(vi1,vi2,vi3,…,viS),i=1,2,3,…,n
(9)
粒子最初位置表示為
Pi=(pi1,pi2,pi3,…,piS),i=1,2,3,…,n
(10)
d.速度與位置更新。在找到最優值之前,粒子根據式(11)更新速度,根據式(12)更新位置:
vis(t+1)=vis(i)+c1r1(t)(pis(t)-xis(t))+c2r2(t)(pg(t)-xis(t))
(11)
xis(t+1)=xis(t)+vis(t+1)
i=1,2,3,…,ns=1,2,3,…,S
(12)
Vis(t)為粒子i第t次迭代速度的第s維分量;c1、c2為學習因子;r1、r2為相互獨立的偽隨機數;pis為粒子最優位置;pg為粒子群最優位置;xis(t)為粒子i第t次迭代位置的第s維分量。
e.迭代求解,選取全局最優值。根據式(4)求出粒子群適應度函數值,判斷是否為全局最優解,并滿足臨界條件。若滿足,則退出算法,輸出最佳個體值。若不滿足,則重新更新粒子群速度與位置,代入粒子群適應度函數繼續求解。
4 仿真結果與分析
為了驗證PSO Fuzzy-PID 控制器有效提升懸架性能,在相同的路面條件與行駛速度下,選擇與被動懸架、PID控制懸架與Fuzzy-PID控制懸架的性能進行比對,比對結果如表5所示。
由表5可以看出,前輪動載荷、前懸架動撓度、車身垂直加速度、俯仰角加速度、后輪動載荷、后輪動撓度的均方根值相較于被動懸架,PID控制使懸架性能提升了14.51%、4.89%、13.83%、15.88%、16.83%、5.74%;Fuzzy-PID控制使懸架性能提升了20.08%、16.88%、17.67%、19.38%、17.56%、17.23%;PSO Fuzzy-PID控制使懸架性能提升了30.06%、27.54%、28.01%、29.54%、28.07%、27.69%。仿真結果表明,PSO Fuzzy-PID控制的半主動懸架的行駛平順性和操縱穩定性要明顯優于PID控制和Fuzzy-PID控制,并且懸架性能得到大幅提升。

表5 各控制方法仿真結果對比
5 結束語
利用粒子群算法的并行全局搜索能力,以提升懸架性能為目標對Fuzzy-PID控制器進行優化,克服了Fuzzy-PID控制中無法使懸架性能達到最優的缺點。通過對各控制方法的仿真結果對比可以看出,相較于傳統PID控制和Fuzzy-PID控制,PSO Fuzzy-PID控制可以大幅降低車輪動載荷、懸架動撓度、俯仰角加速度與車身垂直加速度,提高了汽車行駛平順性和操縱穩定性,懸架性能得到大幅改善。