一種基于丟失距離的無人機網絡效能優化方法
2020-12-07 08:26:12葉磊,程龍
無線互聯科技 2020年18期
關鍵詞:環境
葉 磊,程 龍
(1.南部戰區海軍參謀部某中心,廣東 湛江 524000;2.91878部隊,廣東 湛江 524000)
0 引言
無人機(Unmanned Aerial Vehicle,UAV)最早用于軍事領域,指可控制、可攜帶多種任務設備的無人駕駛航空器[1-2],其用途廣泛,相較有人系統,具有成本低廉、安全性高、易操控、易部署等特點,并越來越多地應用于偵察、監視、救災、應急等領域。當前,由單一、小規模無人機向大規模、集群化發展并成為主流趨勢,其結構簡單,功能較單一,負載能力與續航時間有限,往往不能長時間滯空飛行,如何提升無人機間通信效率和節約能耗顯得尤為重要。各無人機間相對移動較快,網絡拓撲變化復雜,信號衰落、多徑、噪聲等負面因素影響變得尤為顯著[3]。以上原因增加了無人機間通信的“不可靠性”,使無人機間的通信效率下降,控制、能耗成本上升。
1 丟失距離概念及分析
在傳輸層,個體難以判斷造成丟包的原因[3],因此,傳統傳輸控制協議(Transmission Control Protocol,TCP)擁塞控制并不適用無人機群場景。基于以上考慮,在傳輸層上引入丟失距離概念,讓個體通過計算,動態感知通信環境變化,從而改變發送策略。
丟失距離(Lost Distance)是指兩個相鄰的丟失報文之間的序號差。例如,在一個數據流中,序號為100的報文丟失了,而下一個丟失的報文序號為110,則丟包距離為10。假設在某環境下,兩節點進行TCP通信,發送端發送了10個報文,分別為P1,P2, …, P10。在接收端產生了某種原因的丟失,只接收到了P2,P3,P7,P9。以0代表丟失,1代表成功。報文丟失如圖1所示,丟失距離如圖2所示。

圖1 報文丟失

圖2 丟失距離
無人機群通信過程中丟失距離的動態變化主要由通信環境的復雜性引起。根據丟失距離的變化,可感知出通信環境的變化。丟失距離越大,則表明丟包較少,丟包距離越小則相反。因此,可由丟失距離的變化程度來度量通信環境,發送端以該方法提升傳輸效率并降低能耗。
在發送端發出n個報文的過程中,丟失距離在動態變化,為度量丟失距離的變化程度,計算丟失距離的均值m,平均絕對差(Mean Absolute Deviation,MAD),具體如下式:
其中,n為統計窗口,m表示平均丟失距離,越小則丟包越頻繁;MAD表示統計窗口內丟失距離的抖動,越小則丟包抖動越不明顯。例中的m=0.4,MAD=0.36。定義:
Li(m)=Wi(m)-Wi-1(m)
Li(MAD)=Wi(MAD)-Wi-1(MAD)
其中,W1,W2, …,Wi,是以n個分組為單位的統計窗口,圖1中n為10。若Li(m)<0,則表示丟失距離在變小,若Li(MAD)<0,則表示丟失距離抖動在變小。若Wi(m)=n,則表示在此窗口內未發生丟包。定義:
I=aLi(m)-bLi(MAD)
a,b為權重因子,表示Li(m)與Li(MAD)對I的影響程度。α為判斷門限區間,當I<α時,丟包是無線環境不穩定性造成,出于能效考慮應減小發送窗口以降低發送速率。當I∈α時,表示狀態穩定,保持當前發送窗口。當I>α時,表示此時網絡狀態趨向良好,應恢復發送窗口。在算法作用下,當擁塞達到一定程度時,控制傳輸速率,如圖3所示。

圖3 擁塞度與吞吐量關系
3 仿真驗證及分析
在1 000×1 000 m的區域內,以3個無線站點mobile_node0,mobile_node1,mobile_node2模擬無人機通過移動網關與固定工作站node2,node3,node4分別建立TCP通信,均為FTP業務,固定站點為通信發送方,移動站點為接收方。mobile_node3和mobile_node4模擬干擾機,兩者之間隨機地互發數據。在OPNET中配置拓撲,如圖4所示。
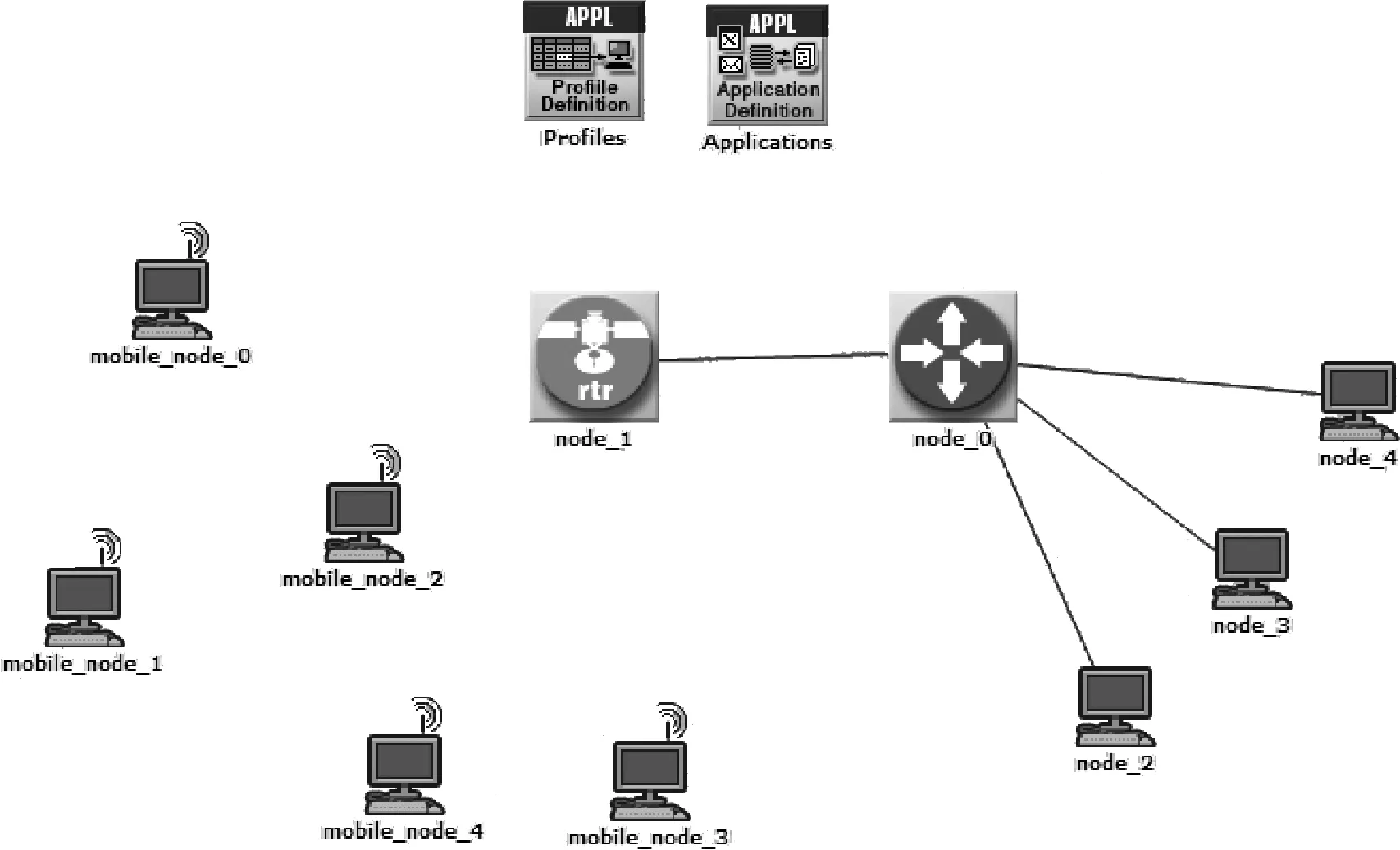
圖4 網絡拓撲
無線鏈路丟包率為均勻分布(0, 5, 1),有線鏈路丟包率為均勻分布(0.01,0.1),TCP數據發送方式為Best Effort。3個模擬無人機站點移動路徑為wlan_roaming_1,路由協議為AODV。干擾機mobile_node3和mobile_node4的發包時間間隔服從于參數為1 s的負指數分布。統計窗口n=100,權重因子a=1,b=0.5,門限區間α=[-2,0],發送窗口以0.5倍抑制,2倍增加。仿真時間為20 min。結果如圖5—6所示。

圖5 優化前全局吞吐量

圖6 優化后全局吞吐量
可以看出,3個部站點的通信交互變為低頻度高量級,其中,1號2號站點變化明顯,其峰值變高,頻度明顯降低,低于1 000 bit/sec的吞吐量得到明顯抑制,在仿真10 min后效果更為明顯。表明算法發揮了效果,抑制了大量初始通信協商和控制開銷,降低了通信次數,提高了信道利用率,節約了能耗,提升了效率。在實際應用中,為達到最佳效果,在不同場景下需要對該算法中的統計窗口、通告門限等參數進行合適取值或自適應調整。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
