利用最小二乘支持向量機求解潛艇內(nèi)外磁場映射模型*
2020-12-07 09:25:54劉勝道何保委趙文春周國華
國防科技大學(xué)學(xué)報 2020年6期
劉勝道,何保委,趙文春,周國華
(海軍工程大學(xué) 電氣工程學(xué)院, 湖北 武漢 430033)
磁隱身技術(shù)是保障潛艇生命力的重要手段,主要方法是潛艇定期前往消磁站進行消磁處理,以降低大部分固定磁場;其次,消磁系統(tǒng)能夠有效地補償感應(yīng)磁場和部分剩余固定磁場。由于地球磁場、海浪沖擊、鐵磁設(shè)備運行等因素影響,潛艇的固定磁場會逐漸積累,最終超出控制指標(biāo),而目前的消磁系統(tǒng)不能實時監(jiān)測和補償固定磁場的變化[1-2]。為實現(xiàn)對潛艇生命力的最佳保護,提高消磁保障效率,應(yīng)對潛艇的固定磁場進行實時跟蹤和補償。
由內(nèi)部磁場來推算外部磁場是其中一種有效的監(jiān)測手段,即在潛艇內(nèi)部特征位置安裝多個磁傳感器,通過測量潛艇內(nèi)部磁場來實時推算其在某一深度或高度的磁場值。文獻[3-5]推導(dǎo)了基于虛擬磁源法的磁場推算模型,文獻[6]在此基礎(chǔ)上進行了空心圓筒實驗;文獻[7-8]采用了徑向基神經(jīng)網(wǎng)絡(luò)算法,并提高了推算精度。上述實驗中,內(nèi)部磁傳感器懸吊在船模內(nèi)部的方式并不符合實際。從安全性出發(fā),內(nèi)部磁傳感器一般布置在兩層殼體之間,此時傳感器距離殼體和鐵磁設(shè)備非常接近,其測量值所受影響也相當(dāng)大,而且固定磁場的變化具有不確定性,因此其外推方法一直制約著閉環(huán)消磁技術(shù)的發(fā)展。
在艦艇消磁勤務(wù)中,通常十?dāng)?shù)次通電即可完成消磁任務(wù),而神經(jīng)網(wǎng)絡(luò)算法一般需要大量數(shù)據(jù)用于訓(xùn)練模型,傳統(tǒng)的深度換算更不可能進行外部磁場推算。本文提出了基于最小二乘支持向量機(Least Squares Support Vector Machine, LS-SVM)的潛艇內(nèi)外磁場映射方法,采用雙殼體潛艇模型作為實驗平臺,將內(nèi)部磁傳感器布置在夾層之間,以潛艇外部垂向固定磁場為研究對象,進行了仿真分析和艇模實驗。
1 基于LS-SVM的磁場映射原理
1.1 內(nèi)外映射法原理
磁場的變化來源于磁矩的變化[5]。對于同一個磁源來說,測量點的磁場變化量與磁矩變化量的關(guān)系式為:
ΔH=C·ΔM
(1)
式中:ΔH是磁場變化量,C是測量點磁場和磁源的關(guān)系矩陣,ΔM是磁矩變化量。
對于同一艘潛艇,可以分別得到其內(nèi)外磁場與磁源的關(guān)系。
(2)
其中:ΔHn和ΔHw分別是潛艇內(nèi)外磁場變化量,Cn和Cw分別是內(nèi)外磁場和磁源的關(guān)系矩陣,[ΔM1ΔM2…ΔMk]是每一個磁矩的變化量。
式(2)最終可化為:
ΔHw=K·ΔHn
(3)
式中,K是由內(nèi)到外的磁場映射矩陣。測量點一旦固定,K即為常數(shù)。這表明只需得到多組潛艇內(nèi)外磁場值用于求解K,即可通過內(nèi)部磁場直接推算出外部磁場。
1.2 LS-SVM原理
潛艇內(nèi)部結(jié)構(gòu)復(fù)雜,鐵磁設(shè)備繁多,固定磁場在航行過程中不斷積累和變化,具有不確定性,直接求解K十分困難。
最小二乘支持向量機是基于支持向量機的改進算法,它區(qū)別于神經(jīng)網(wǎng)絡(luò)中依賴樣本數(shù)量的經(jīng)驗風(fēng)險最小化原理,采用了結(jié)構(gòu)風(fēng)險最小化準(zhǔn)則[9],不單純追求損失函數(shù)最小化,有效避免了在小樣本條件下的過擬合現(xiàn)象。
LS-SVM用于回歸預(yù)測的基本思想是將樣本映射至高維空間,通過構(gòu)建決策函數(shù),把非線性問題轉(zhuǎn)化為線性問題。LS-SVM能夠解決具有小樣本、特征點多、局部變化等特點的分類與回歸問題,非常適用于解決固定磁場推算這類應(yīng)用。其基本原理如下:
給定樣本D={(xi,yi),i=1,2,…,k,xi∈Rm,yi∈Rn},xi和yi分別為輸入和輸出矩陣,通過映射函數(shù)φ(x)將樣本映射至高維空間。
y=ωΤφ(x)+b
(4)
式中:ω為權(quán)值矩陣,b為偏置量。
基于結(jié)構(gòu)風(fēng)險最小化原理,該模型需要解決以下規(guī)劃問題:
(5)
yi=ωΤφ(xi)+b+ei,i=1,2,…,k
(6)
其中:J為懲罰函數(shù),e為輸出誤差,γ為懲罰參數(shù)。
此時對式(5)和式(6)引入拉格朗日函數(shù),則有:
(7)
式中,?i為拉格朗日系數(shù)。
分別對參數(shù)ω、b、e、?求偏導(dǎo),根據(jù)KKT條件[10]消除變量ω和e,式(4)的最終回歸函數(shù)為:
(8)
1.3 交叉驗證法優(yōu)化LS-SVM參數(shù)
LS-SVM模型參數(shù)的選取對訓(xùn)練效果影響巨大,其中最主要的是樣本懲罰參數(shù)γ和核函數(shù)參數(shù)σ,常用的尋優(yōu)方法有交叉驗證法、粒子群算法、網(wǎng)格搜索法和遺傳算法[11]等。采用網(wǎng)格搜索法結(jié)合10折交叉驗證法來尋找最佳參數(shù),優(yōu)化映射模型,既能保證訓(xùn)練精度也能滿足訓(xùn)練效率。交叉驗證法基本流程如下:
步驟1:不重復(fù)抽樣將原始數(shù)據(jù)隨機分成10份。
步驟2:每一次挑選其中1份作為測試集,剩余9份作為訓(xùn)練集。
步驟3:多次重復(fù)步驟2,使得每個子集都有一次機會作為測試集。
步驟4:每次訓(xùn)練得到一個模型,用這個模型在測試集上測試,保存模型的參數(shù)指標(biāo)。
步驟5:計算10組測試結(jié)果的誤差平均值作為該模型的最終性能指標(biāo)。
2 仿真分析
2.1 建模準(zhǔn)備
仿真分析采用雙殼體潛艇簡易模型,其參數(shù)見表1。
表1 潛艇模型參數(shù)
表1中,艇模的磁導(dǎo)率為200,內(nèi)部含有若干小立方體殼模擬鐵磁設(shè)備。27個內(nèi)部磁傳感器環(huán)繞內(nèi)殼沿艇模縱向分布,15個外部磁傳感器沿龍骨正下方放置于標(biāo)準(zhǔn)測量平面,如圖1所示。

圖1 艇模內(nèi)部示意圖Fig.1 Sketch map of submarine model
將艇模剖分成若干單元,每個單元的磁化強度可認(rèn)為是常數(shù)。由積分方程法[12]反演得到磁矩,通過改變固定磁矩大小,同時得到若干組內(nèi)外固定磁場用于后續(xù)的數(shù)值計算。值得注意的是,任何物體的磁矩都不是獨立的,相鄰的磁矩間存在連續(xù)性,即單個磁矩不能發(fā)生過強的突變。因此,在給定磁矩變化量時,相鄰磁矩的變化量必定是連續(xù)變化的。積分方程法流程如圖2所示。
圖2 積分方程法流程圖Fig.2 Diagram of integral equation method
2.2 仿真結(jié)果
仿真共獲取100組內(nèi)外磁場值,將第一組作為測試樣本,其余組作為訓(xùn)練樣本,研究在樣本數(shù)目不同的情況下,對外部磁場推算結(jié)果的影響。定義誤差計算公式為:
(9)
式中:ΔH′w為推算值,ΔHw為仿真值,n為外部測量點數(shù)。
將外部垂向磁場仿真值作為標(biāo)準(zhǔn)值,分別計算LS-SVM算法和徑向基神經(jīng)網(wǎng)絡(luò)(Radius Basis Function Neural Network, RBFNN)算法推算值的誤差,結(jié)果見表2。
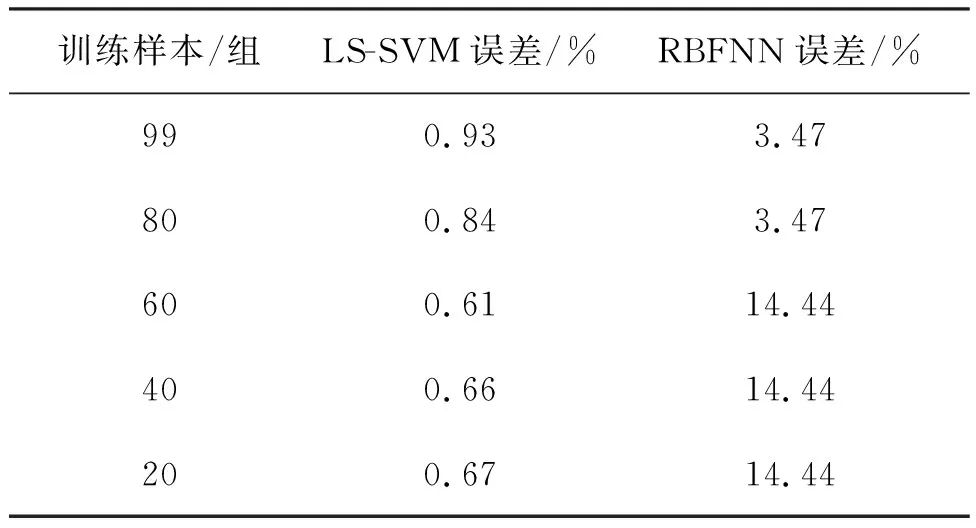
表2 訓(xùn)練樣本不同時LS-SVM和RBFNN推算誤差比較
由表2可知,隨著訓(xùn)練樣本的減少,LS-SVM算法的誤差相差不大,而RBFNN算法因為失去了部分有效數(shù)據(jù),誤差有所增大。
因此,將每一組數(shù)據(jù)作為測試樣本,其余99組作為訓(xùn)練樣本,得到每一組測試樣本所對應(yīng)的外部磁場推算值,推算誤差如圖3所示。
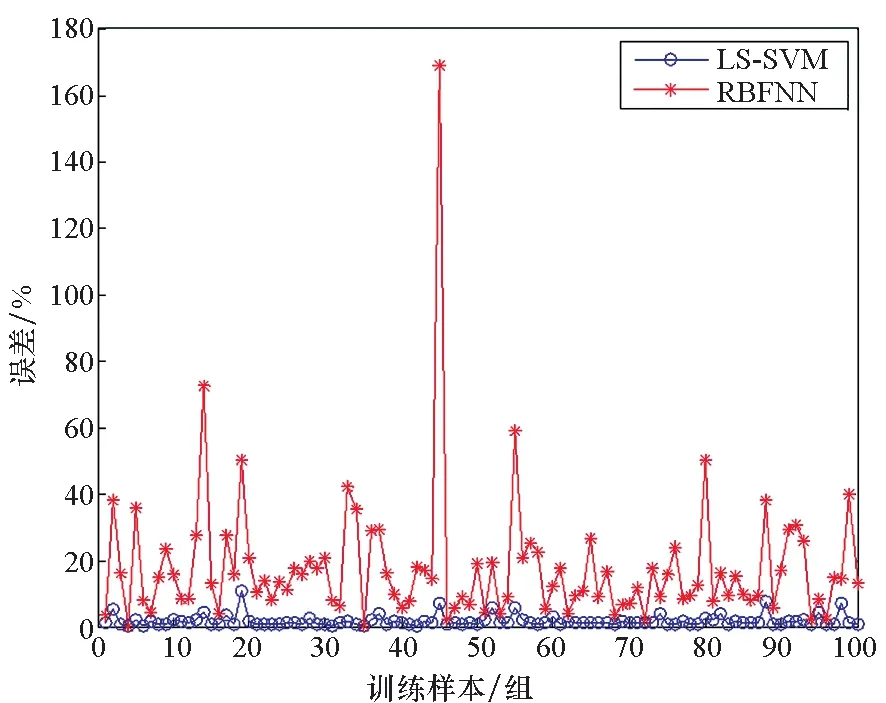
圖3 仿真分析下LS-SVM和RBFNN推算誤差比較Fig.3 Extrapolation error comparison of LS-SVM and RBFNN of simulated analysis
最小二乘支持向量機的推算精度明顯優(yōu)于徑向基神經(jīng)網(wǎng)絡(luò)算法,其誤差一般在4%以下,最大誤差為10.02%。由于固定磁場變化復(fù)雜,訓(xùn)練樣本過少,造成RBFNN推算結(jié)果誤差很大甚至失真。相比之下,LS-SVM能夠降低因上述問題所帶來的誤差。
3 艇模實驗
3.1 實驗設(shè)計
在潛艇的兩層殼體之間布置27個三分量磁傳感器作為內(nèi)部測量點,潛艇模型外殼封裝完畢后,將其放在測量平臺上,在龍骨正下方標(biāo)準(zhǔn)測量深度平面放置15個磁傳感器作為外部測量點。實驗過程如下:
步驟1:測量艇模原始磁場。
步驟2:隨機改變縱向、橫向或垂向補償線圈電流,同時給工作線圈施加交變衰減的電流,從而改變艇模的固定磁場。
步驟3:每次通電完畢后,斷開所有電流,記錄此時的內(nèi)外磁場值,再進行下一次通電。
步驟4:將所有磁場值匯總處理。
3.2 實驗結(jié)果
實驗共獲取100組磁場值,取其中1組作為測試樣本,其余99組作為訓(xùn)練樣本,得到每一組測試樣本所對應(yīng)的外部磁場推算值。將外部垂向磁場測量值作為標(biāo)準(zhǔn)值,分別計算LS-SVM算法和RBFNN算法推算值的誤差,結(jié)果如圖4所示。
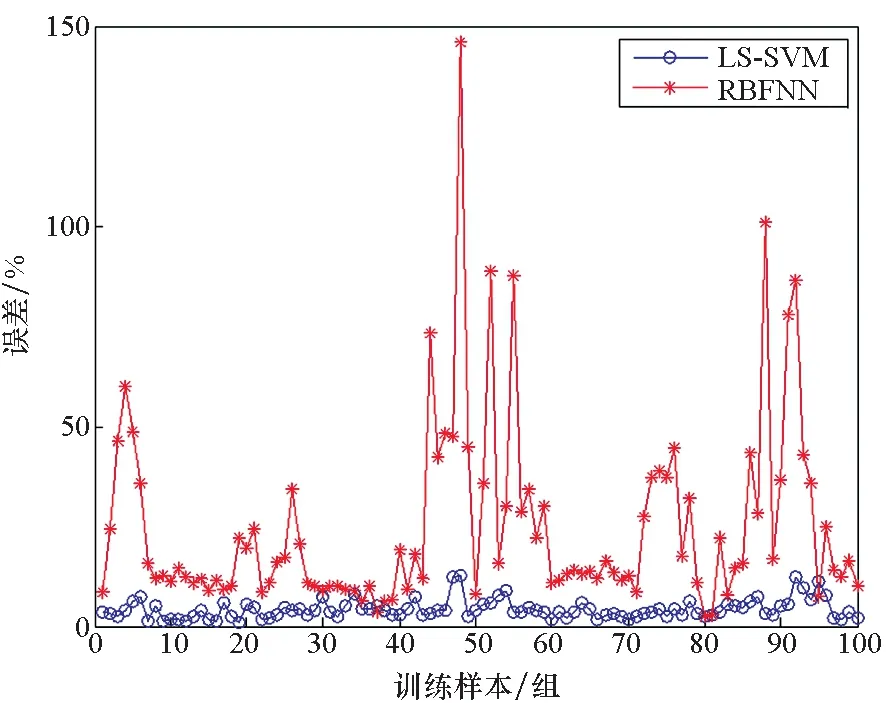
圖4 實驗分析下LS-SVM與RBFNN推算誤差比較Fig.4 Extrapolation error comparison of LS-SVM and RBFNN of experimental analysis
在艇模實驗中,最小二乘支持向量機的推算精度同樣明顯優(yōu)于徑向基神經(jīng)網(wǎng)絡(luò)算法,其誤差一般在 6%以下,最大誤差為12.76%。
3.3 誤差分析
仿真和實驗結(jié)果都證明了基于LS-SVM的內(nèi)外映射法能夠準(zhǔn)確得到潛艇外部固定磁場的變化量。其中實驗結(jié)果產(chǎn)生誤差的原因主要有以下兩個方面:
1)實驗過程中,磁傳感器受外界環(huán)境干擾而發(fā)生變化;
2)傳感器存在測量誤差以及算法本身的計算誤差。
4 結(jié)論
本文采用基于LS-SVM的內(nèi)外磁場映射方法來推算潛艇外部垂向固定磁場,仿真和實驗結(jié)果吻合較好,在誤差范圍內(nèi)能夠滿足技術(shù)要求。與RBFNN算法相比,LS-SVM有著更好的泛化能力和推算精度,且不需要大量的樣本用于訓(xùn)練模型,符合艦艇消磁勤務(wù)工作實際,具有較強的實用性。下一步研究考慮在該方法的基礎(chǔ)上,對內(nèi)部磁傳感器的安裝位置及數(shù)目進行優(yōu)化,不斷提高推算精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52