動力定位系統在海洋綜合科考船定點作業中的應用
2020-12-08 02:07:05張彬彬俞啟軍吳永亭華清峰李治遠石旭亮
中國水運 2020年10期
張彬彬 俞啟軍 吳永亭 華清峰 李治遠 石旭亮
摘 要:動力定位系統具有自動定位模式、自動艏向模式、自動航跡模式、目標跟蹤模式、Joystick聯合操縱模式等功能,可有效降低外部風、浪等環境因素對科考船調查作業的影響,提高調查作業的工作效率、原位精度,保障調查作業安全,對科考船調查作業具有極其重要的支撐作用。本文在介紹動力定位系統的系統組成和工作原理的基礎上,針對“向陽紅01”號新一代綜合科考船動力定位的定點空位功能,結合船載調查設備,以海洋定點溫鹽觀測(CTD)為例,詳細分析動力定位系統在科考船定點作業中的應用,證明該系統能夠有力保障定點作業的安全性,有力提高作業精度和效率,為科考船調查作業提供指導。
關鍵詞:科考船;動力定位系統;定點作業;作業效率;原位精度
中圖分類號:U644.1? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? 文章編號:1006—7973(2020)10-0078-03
隨著地球人口的急劇增加和世界經濟的高速發展,導致的資源短缺問題和全球環境變化問題日益嚴重,海洋作為全球各類資源的儲量庫和環境污染的容納器,海洋已成為各國海洋權益和經濟發展的重要戰略要地[1,2]。人類對海洋開發和探索的范圍不斷增加,我國海洋科學考察區域也步入深遠海,科學家對新一代海洋綜合科學考察平臺表現出了迫切需求。海洋綜合科考船是用于海洋科學調查、應用技術研究以及測量或勘探等船舶的統稱,是人類探索海洋、認識海洋的重要工具,尤其是對中遠海海域的科學考察發揮著不可替代的作用,我國自20世紀50年代開始建造海洋科考船,先后經歷了改造、自主設計階段[3-4]。經過半個多世紀的積淀與發展,隨著“海洋強國戰略”的實施,中國科考船進入高速發展階段,尤其近幾年國內建造了一大批新一代綜合科考船,均配備先進的船舶動力系統和大量的海洋科考裝備。如何充分利用船舶先進的動力系統和科考設備,進一步提高調查效率和精度、保證調查安全,需要一線船舶操控和作業人員利用專業知識交叉融合,共同深入探討。
本文通過對科考船動力定位系統的介紹,結合“向陽紅01”號科考船動力定位系統,分析其在科考作業中的應用優勢,具體實例分析其在定點作業中的應用,為相關從業人員提供參考。
1 動力定位系統組成與工作原理
動力定位系統(Dynamic Positioning System)簡稱動力定位(DP),是一種閉環控制系統,它無須借助錨泊系統的作用,利用自身裝備的各類傳感器不斷檢測出船舶實際位置與目標位置的偏差、運動狀態、外界風力、波浪、海流等擾動力的大小與方向,計算出使船舶恢復到預設目標所需推力的大小,通過控制系統驅動船舶推進器來抵消作用于船上的外力,使船舶保持在某確定位置或沿一定預定航跡航行,從而使船舶具備定點控位、水下目標跟蹤與自動循跡航行能力,是深水鉆井平臺、深水輔助工程船、海洋科學考察船等均必須配的控制系統[5-8]。
船舶動力定位系統一般由測量系統、控制系統和推進系統三部分組成。測量系統提供了坐標反饋及環境傳感器功能,包括提供船舶實時位置的定位系統、艏向數據的羅經系統、船舶姿態數據的運動傳感器、提供外界環境數據的風速計、海流計等;控制系統通過一定的算法提供閉環調節功能,主要有數據處理單元、數據接口單元、數據解算單元和人員控制單元等;推進系統是執行機構,接受控制系統發出的指令,產生足夠的推力和力矩以抵抗船舶受到的各種外力,實現動力定位,主要由多套發電機、尾部推進器、側推進器組成[9-10]。
我國新一代綜合科考船“向陽紅01”安裝的動力定位系統是DP1系統,其具備動力定位系統所有的基本功能。圖1是“向陽紅01”船動力定位系統組成圖,為Kongsberg提供的K-Pos DP-11動力定位系統,其測量系統包括兩套DGPS、MRU5、風速風向儀;其控制系統包括1套K-Pos DP-1控制器單元,3套K-Pos DP操作單元分別位于駕駛臺、八角樓和ROV控制室,1套cJoy操作終端,兩套K-Thrust便攜控制面板;推進系統包括2臺主發電機,吊艙推進器和側推各1套。
K-Pos DP-11具有自動定位模式、自動艏向模式、自動航跡模式、目標跟蹤模式、Joystick聯合操縱模式等,功能豐富,滿足科考船所有的調查作業需求[11]。使用自動定位模式時,在五級海況和1.5節流的條件下,控位精度誤差不大于3米,在科考船定點作業中具有極其重要的作用。
2 動力定位系統在定點作業中的應用
在傳統的科考船定點作業中,一般要求駕駛員根據水深、風流速度和方向等環境因素將船舶作業面迎風停泊在作業點附近,然后完車,使船舶在漂航的狀態下作業,當船舶橫向迎風時,船舶晃動加劇,降低作業人員和設備的安全。根據一般調查作業經驗,科考船進行3000米水下設備定點作業時,絞車運行速度為40-60m/min,設備收放大概需要2-3個小時,受風、浪、流對船舶位置的影響,船舶一般漂出2-5海里,導致絞車纜傾斜收放,單次放纜長度在4000米以上。這種作業方式有以下缺點,首先,會增加絞車收放纜的長度,延長作業時間、降低作業效率,浪費船時;其次,會影響原位觀測數據準度,如水體調查觀測值并非垂直剖面,或地質采樣作業時采樣點與船位坐標偏差較大;最后,船舶漂移會降低著地取樣的成功率。若船舶開啟動力定位定點作業,動力定位系統則會抵抗外部風流等因素的影響,保持在設計作業點作業,既保障了船舶原位觀測數據準度,又能夠提高作業效率。因此,動力定位系統對重力柱取樣、箱式取樣、溫鹽深(CTD)觀測、巖芯取樣、電視抓斗、熱流探針、聲學原位測量等定點作業具有極其重要的意義。以下以“向陽紅01”船定點作業為例,綜合應用船上深水單波束測深系統,詳細展示動力定位系統在科考船定點作業中的作用。
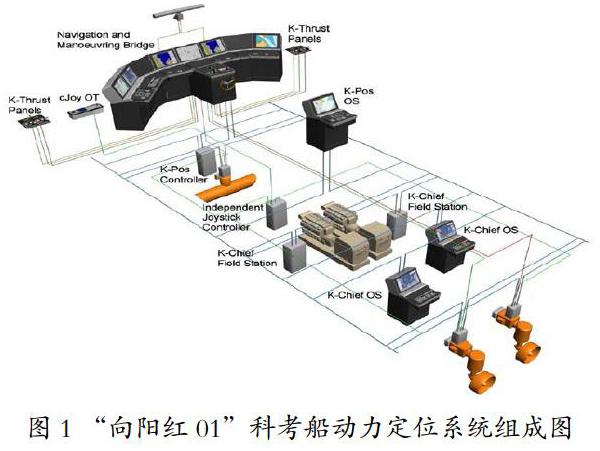
在某海域,“向陽紅01”船在CTD作業前開啟動力定位系統,使用導航定位軟件Hypack記錄科考船航跡,如圖2所示,圖中紅色圓圈為船舶位置,直線代表航向,曲線代表航跡,外部圓圈的半徑為5m,可以看出DP系統定位精度在2米左右。實踐表明,“向陽紅01”船在開啟動力定位系統后,具有極高的控位精度,有助于提高定點調查作業的原位測量精度。此外,當遇到較差海況時,啟用DP把船保持在頂風頂流方向,船舶的橫搖將大幅縮小,有效降低作業風險。
為記錄水下設備在作業過程中狀態,開啟深水單波束測深系統(EA600),觀測CTD作業過程。當設備下放到一定深度,設備位于單波束的波束開角范圍內形成反射單元,部分下傳聲波能量遇到設備后形成除海底反射之外的反射能量,反射回換能器,而被單波束系統記錄下來。
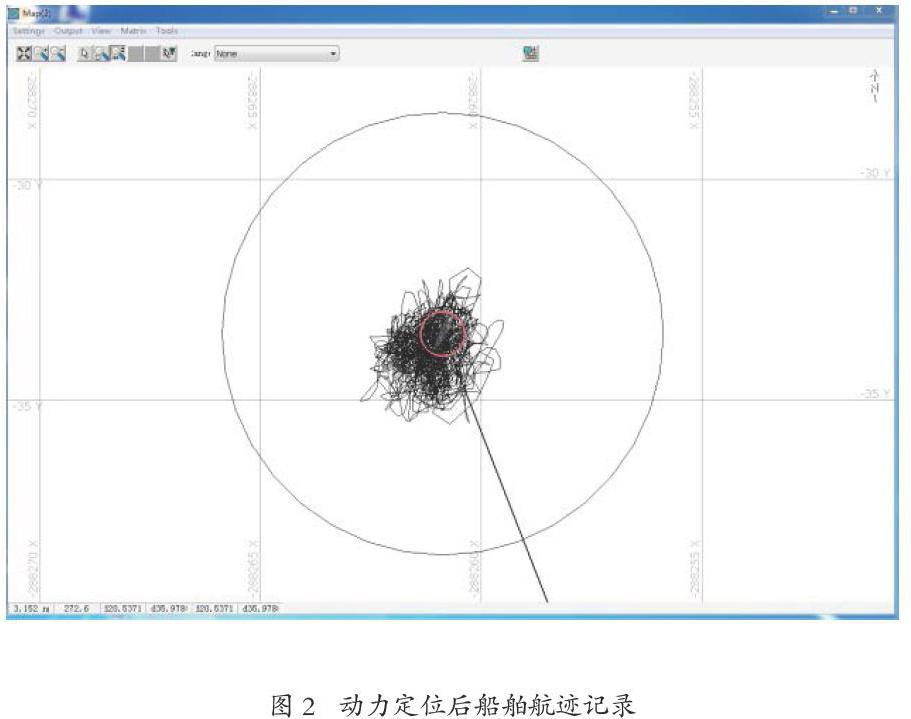
圖3為作業時記錄的單波束剖面圖,由于開啟動力定位,船舶實現精準定位,單波束探測海底區域為同一個反射面,所以在數據記錄過程中水深為恒定值。設備的下放和回收過程均被單波束系統記錄下來,如圖3中虛線所示,剖面圖可以反映設備的深度、海底深度,進一步可計算出設備的離底高度,而虛線的斜率則表示設備收放時絞車收放纜的速度。根據單波束EA600就可計算水下設備距底高度,為絞車放纜長度提供指導,避免設備作業安全問題。
為驗證動力定位系統在作業效率方面的提高,在作業過程中記錄CTD測得的深度、單波束EA600測得的設備深度以及CTD絞車放纜長度,對比三者之間的差值,如表1所示。將表1紀錄三種數據進行繪圖,橫坐標為紀錄序號,縱坐標為設備深度,進行對比,如圖4所示。
CTD掛載的壓力計是根據水壓計算水深,具有極高的測深精度。根據表1數據對比CTD絞車放出纜長和壓力計所測得的深度,兩者最大差值在100米左右,表明在科考船使用動力定位作業時,設備基本垂直收放,避免因船舶隨風流漂移而導致的設備傾斜收放,減少定點作業時絞車收、放纜長度,從而節約作業占用船時,提高作業效率。
另一方面,根據表1紀錄數據,作業深度在3200米內時,對比壓力計測得設備深度和單波束EA600測得水深,兩者之間誤差最大為40米,精度控制在4%以內,可有效指導設備與絞車的收放操作,對比圖4所繪制的壓力計測量深度曲線和EA600所測得深度曲線,兩者可以很好地擬合,表明可以利用單波束能夠實現設備水下定深。當設備距底較近時,在圖4中仍可觀測到設備的反射信號,提醒設備與絞車操作人員提高注意力,調整絞車收放纜速度,保障作業安全。
3 結論
根據動力定位系統工作原理,綜合分析船舶動力定位系統作用和水下設備作業流程,通過實例分析得到以下結論:
(1)科考船定點作業時應用動力定位系統,可有效降低外界因素對船舶位置的影響,實現精準控位,可以減少絞車收放纜長度,從而節約作業占用船時提高作業效率,并且能夠提高科考船深水定點作業原位觀測數據準確度;
(2)海洋科考,裝備先行,新一代綜合科考船調查設備種類越來越豐富、技術指標越來越先進,然而現場工程師技術水平是作業安全、作業效率、測量精度的決定性因素,現場工程師應向全面型專業人才發展,綜合利用船上調查設備,充分發揮設備能力,交叉印證,保障調查任務順利實施。
參考文獻:
[1]趙志高,楊建民,王磊,等. 動力定位系統發展狀況及研究方法[J]. 海洋工程,2002,20(1): 91-97.
[2]余培文,陳輝,劉芙蓉. 船舶動力定位系統控制技術的發展與展望[J]. 中國水運,2009(2): 44-45.
[3]蘇振東,余軍浩,王凱,等,中美海洋科考船對比分析[J]. 艦船科學技術, 2016,38(1):154-157.
[4]張麗瑛,張兆德. 海洋科學考察船的現狀與發展趨勢[J]. 船海工程,2010,39(4):60-63.
[5]陸會勝. 船舶動力定位系統的使用[J]. 航海技術, 2006, 5:31-33.
[6]鄭榮才,宋健力,黎瓊,等. 船舶動力定位系統 [J]. 中國慣性技術學報, 2013, 21(4): 495-499.
[7]李軍,方泉根,龔少軍. 海工船動力定位能力分析系統研究與應用[J]. 中國航海,2014,37(1):120-125.
[8]何進輝,張海彬,朱仁傳,等. 某深海鉆井船DP3動力定位能力分析[J]. 船舶, 2018(5): 11-17.
[9]吳德峰,楊國豪. 船舶動力定位關鍵技術研究綜述[J]. 艦船科學技術, 2014, 36(7): 1-6.
[10]何水原,羅偉東,于彥江,等. 動力定位系統再大洋富鈷結殼中的應用[J]. 海洋地質前沿, 2015, 31(10): 57-64.
[11]李文明,于洋,俞啟軍. 船舶DP系統在科考船中的應用[J]. 中國水運, 2020(3):75-77.
基金項目:中國大洋礦產資源研究開發協會項目(DY135-S2-2-04)