無人雙體船的型線優(yōu)化設(shè)計(jì)研究
2020-12-08 02:07:05肖磊
中國水運(yùn) 2020年10期
關(guān)鍵詞:優(yōu)化
肖磊


摘 要:無人水質(zhì)檢測艇的適用范圍廣,使用成本低廉,越來越受到相關(guān)使用部門的歡迎。本文在分析用戶使用要求的基礎(chǔ)上,提出了雙體船線形用于搭載相關(guān)設(shè)備,以實(shí)現(xiàn)相關(guān)功能要求的目的。基于優(yōu)化理論和數(shù)值仿真技術(shù),本文完成了裸船體的線形阻力性能優(yōu)化,同時(shí)對(duì)帶附體的阻力性能進(jìn)行了校核,得到了滿足設(shè)計(jì)要求的優(yōu)良船型。
關(guān)鍵詞:雙體船;優(yōu)化;型線
中圖分類號(hào):U661.4? ? ? ? ? ? 文獻(xiàn)標(biāo)識(shí)碼:A? ? ? ? ? ? 文章編號(hào):1006—7973(2020)10-0110-02
1 引言
隨著遠(yuǎn)程遙控手段以及相關(guān)設(shè)備的發(fā)展,無人設(shè)備與系統(tǒng)的市場需求日益龐大,其中在水質(zhì)檢測領(lǐng)域?qū)o人檢測船提出了新的需求。無人水質(zhì)檢測船比傳統(tǒng)的人工水質(zhì)采樣、監(jiān)控?zé)o論是在時(shí)效性還是在作用領(lǐng)域上均具有較大優(yōu)勢。本文對(duì)某型無人雙體船的型線進(jìn)行優(yōu)化研究,在滿足總布置的要求下得出了較優(yōu)船型。
2 船型的要求
根據(jù)實(shí)際需求,本文研究的無人雙體船要求需要很好的設(shè)備擴(kuò)展性,能搭載市面上常見的不同尺寸的監(jiān)測設(shè)備,對(duì)航速、結(jié)構(gòu)、功能等都要體現(xiàn)先進(jìn)性,獨(dú)特性。船型的具體要求如表1所示。
考慮到對(duì)船型的具體需求,該船型的船長傅汝德數(shù)Fr=1.1~1.2,排水體積傅汝德數(shù)Fr?>2.0。查閱資料顯示,船體型線設(shè)計(jì)為折角型有利于阻力性能,因此本雙體船型的母型船采用帶折角的片體型式。
3 船型優(yōu)化改進(jìn)
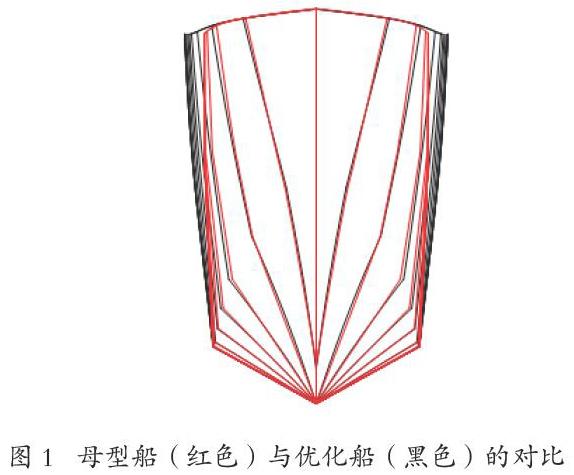
經(jīng)過計(jì)算對(duì)比發(fā)現(xiàn),通過改變片體間距能有效地改變船體的水動(dòng)力性能。采用智能優(yōu)化算法,結(jié)合成熟的商業(yè)軟件,完成了該船型的阻力性能優(yōu)化。經(jīng)過優(yōu)化改進(jìn),優(yōu)化改進(jìn)的船型可在滿載的情況下滿足10節(jié)的設(shè)計(jì)航速,船型主尺度如表2所示,型線如圖1所示。
為了校核優(yōu)化船型的性能,對(duì)優(yōu)化船型進(jìn)行計(jì)算流體力學(xué)的數(shù)值仿真,計(jì)算其阻力性能,其波形圖和船體壓力分布圖如圖2和圖3所示。經(jīng)過計(jì)算,該船型在設(shè)計(jì)航速裸船體的總阻力為390N,尾傾角3度。
4 船型布置設(shè)計(jì)
考慮到無人檢測艇要實(shí)現(xiàn)測深與水質(zhì)采樣等功能,必須要搭載包括多波束測量儀(表3)在內(nèi)的檢測設(shè)備。由于多波束測量儀對(duì)布放有著嚴(yán)格的要求,同時(shí)其體積和重量又比較大,因此只能布置在連接橋的下方。為了減少該部分的阻力,根據(jù)經(jīng)驗(yàn)布置一對(duì)水翼。為了驗(yàn)證其阻力情況,需要考慮帶水翼和多波束測量儀情況下的雙體船水動(dòng)力性能。
結(jié)合設(shè)備尺寸以及船體尺寸,附體的具體位置以及帶附體的波形圖及壓力分布圖如圖4和圖5所示。
通過計(jì)算結(jié)果可知,加裝水翼有助于總阻力的減小,并且減阻效果明顯。該船型在設(shè)計(jì)航速帶附體的總阻力為450N。滿足設(shè)計(jì)要求。
5 結(jié)論
無人水質(zhì)檢測船比傳統(tǒng)的人工水質(zhì)采樣、監(jiān)控具有先天的優(yōu)勢,但是其布置的設(shè)備眾多,使用要求較高。這也導(dǎo)致該類船型布置復(fù)雜,同時(shí)航速要求高。該類船型的設(shè)計(jì)難度較大。
未來對(duì)該類船型的研究應(yīng)進(jìn)一步增加船體結(jié)構(gòu)重量的約束,在考慮船型阻力性能的同時(shí),兼顧結(jié)構(gòu)重量。同時(shí),未來也需要開發(fā)出適用于此類用途的專用船型。
參考文獻(xiàn):
[1]方靜,黃晶.基于CFD的超小型雙體無人船總體設(shè)計(jì)[J].船舶工程,2018,40(5):1-4.
[2]楊顯原,吳家鳴,李林華.基于最小阻力的雙體無人船優(yōu)化設(shè)計(jì)[J].艦船科學(xué)技術(shù),2018, 40(8):27-32.
[3]宋國華.雙體船的總體性能設(shè)計(jì)[J].船舶,1998, 1:32-45.
[4]陳軍,盧曉平.用線性興波阻力理論計(jì)算穿浪雙體船的興波阻力[J].海軍工程大學(xué)學(xué)報(bào),2002, 14(3):53-58.
[5]馬健,張?jiān)俜颍罨菝?穿浪雙體船剩余阻力影響因素分析及總阻力預(yù)報(bào)方法[J].船舶力學(xué),2011, 15:32-39.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45