基于骨肌力學的人體髖關節逆向動力學仿真及分析
2020-12-14 04:35:10李嘉成連暉段朋云
軟件導刊 2020年9期
李嘉成 連暉 段朋云
摘 ?要: 髖關節是人體最重要最復雜的關節之一,研究髖關節生物力學性能和評估治療骨科疾病的植入物需要準確且符合實際的生理載荷環境,因此,深入研究髖關節在人體常見行為動作下的載荷工況具有重要意義。本文基于AnyBody軟件平臺對人體常見的典型行為動作進行骨肌建模和逆向動力學仿真,計算求解后分析人體雙腿站立和步態運動時髖骨所受關節力及主要肌肉力的變化情況,得出的結果可為髖關節生物力學的相關研究提供支持幫助,所用的方法還可以應用到其它骨骼的研究上。
關鍵詞: AnyBody軟件;逆向動力學;步態;仿真分析
中圖分類號: R319;TP3 ???文獻標識碼: A ???DOI:10.3969/j.issn.1003-6970.2020.09.007
本文著錄格式:李嘉成,連暉,段朋云,等. 基于骨肌力學的人體髖關節逆向動力學仿真及分析[J]. 軟件,2020,41(09):2629+42
【Abstract】: The hip joint is one of the most important and complex joints in the human body. The study of the biomechanical properties of the hip joint and the evaluation of implants for the treatment of orthopedic diseases need accurate and realistic physiological load environment. Therefore, it is of great significance to obtain and deeply study the load conditions of the hip joint under the common behavior of the human body. Based on the AnyBody software platform, this paper carries on the bone and muscle modeling and reverse dynamics simulation of the typical behavior of the human body, and obtains the hip joint force and the main muscle force of the human body from sitting posture to standing and gait movement, and analyzes their changes. The results can provide support and help for results can provide support and help for the analysis of mechanical characteristics of hip joint and biomechanical research such as fracture treatment and functional training. The method can also be applied to the stress analysis of other bones and the study of rehabilitation exercise.
【Key words】: Anybody modeling system; Inverse dynamic; Gait; Simulation analysis
0 ?引言
由髖臼和股骨頭及其附著的韌帶等組成的髖關節在人體各種行為動作中的作用十分重要,因此骨科疾病如骨折和骨質疏松等的治療需要對髖關節生理功能及其力學性能等進行深入的研究和充分的認識。由于髖關節解剖結構復雜且動作變化多樣,研究髖關節的生物力學性能和評估用于治療骨科疾病的植入物時,現有的文獻多采用簡化的載荷工況等往往采用以往的文獻或簡化的生理載荷工況進行分析,分析時或根據實驗簡單加載進行仿真,或多考慮模擬單腿或雙腿站立時的關節力[1-5],如只考慮模擬單腿站立時的關節力,或按照生物力學實驗研究時所用的簡單加載,載荷工況較為單,而考慮肌肉力和復雜行為動作生理載荷的髖關節力學分析較少。隨著計算機技術和實驗設
備的發展,對于一些復雜行為動作,可以通過運用運動捕捉系統對人群樣本進行試驗測試獲得相關運動學和動力學參數,也可以利用基于逆向動力學方法的數值模型獲取肌肉和關節等的相關規律和力學參數,這就為骨生物力學的研究提供了極大幫助,尤其是利用數值模型建立類似人體的骨肌系統并對相關運動進行仿真和計算求解具有獨特的優勢,成為研究人體運動和提取復雜載荷工況的重要手段[6]。本文基于AnyBody軟件平臺對人體常見的典型行為動作進行骨肌建模和逆向動力學仿真,計算求解后得到人體從坐姿到站立過程和步態運動時髖骨所受關節力及主要肌肉力,并對其變化情況進行分析,為髖關節力學特征和功能訓練等生物力學的研究提供更符合體內受力環境的載荷工況。
1 ?AnyBody軟件人體骨肌建模
AnyBody是基于骨肌系統對運動生物力學進行逆向動力學分析的一款軟件,可通過其內部語言Anyscript的編寫對人體部分或整體骨肌系統進行建模,并通過內部算法進行求解得到各個關節和肌肉的作用力[7]。
1.1 ?模型及比例縮放
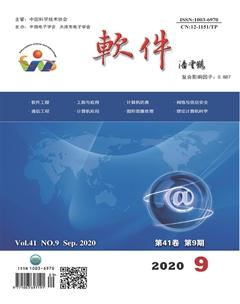
本文選擇坐站轉移和步態行走兩種常見的行為動作進行仿真分析,根據中國居民營養與慢性病狀況報告(2015)[8],以中國男性平均身高體重為例,以身高H=167 cm,體重M=66 kg的成年男性建立骨肌模型,如圖1所示。
1.2 ?肌肉模型
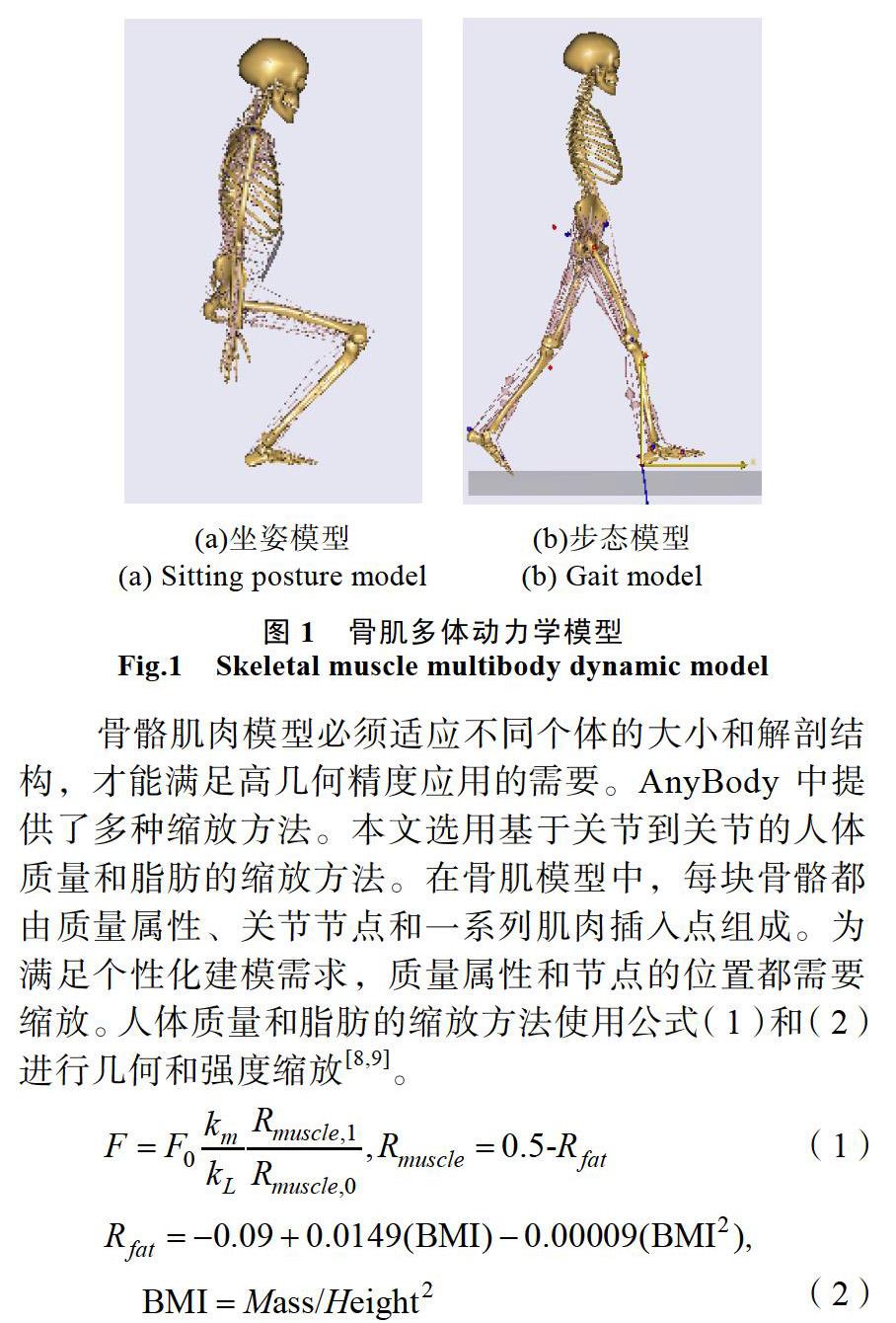
AnyBody的模型數據庫提供人體各種部位的骨肌模型,可根據需要調取使用并對模型參數進行修改[11]。AnyBody建模系統中包括兩個部分的肌肉計算模型,分別為運動學模型和強度模型。其中運動學模型決定肌肉的形態和肌肉力方向,分為肌肉起止點型和包裹型兩種,本文基于下肢解剖學選用肌肉起止點定義肌肉運動學模型。強度模型決定肌肉的活動性和受力情況,AnyBody基于肌肉的工作原理提供了三種不同復雜程度的模型[7],由于復雜工況則采用簡單肌肉模型仿真效果較好,而簡單工況采用復雜肌肉模型仿真效果更好,因此將步態模型設置為最簡單的只考慮肌肉強度的AnyMuscleModel模式。將雙腿站立模型設置為AnyMuscleModel3E模式,如圖2說明,此模式是設定一種經典的Hill[12]肌肉模型。圖2中CE是收縮元,代表肌肉纖維的活動性能;PE是并聯彈性元,代表肌纖維的被動剛度;T是串聯彈性元,代表肌腱的彈性;γ是肌腱與肌纖維的夾角。收縮元產生主動張力,彈性元產生被動張力。其中串聯彈性元反映肌肉長度與肌肉速度的關系,并聯彈性元反映肌肉生理橫斷面與肌肉力的關系(正相關)。此模型建立了骨骼肌收縮時力與速度的關系,從而使仿真時可以考慮到肌肉長度和收縮速度對瞬時肌肉力大小的影響。
1.3 ?肌肉募集
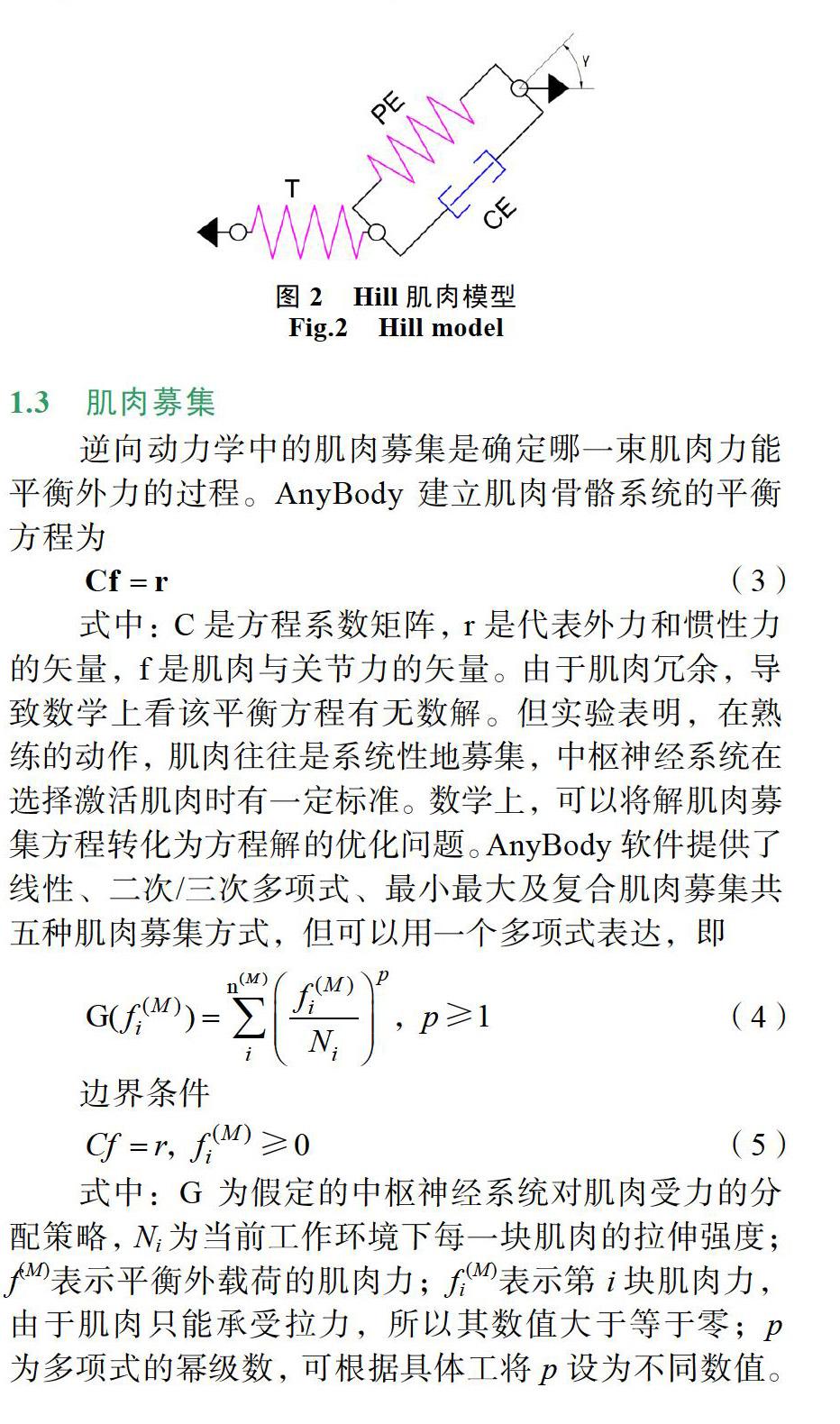
逆向動力學中的肌肉募集是確定哪一束肌肉力能平衡外力的過程。AnyBody建立肌肉骨骼系統的平衡方程為式中:C是方程系數矩陣,r是代表外力和慣性力的矢量,f是肌肉與關節力的矢量。由于肌肉冗余,導致數學上看該平衡方程有無數解。但實驗表明,在熟練的動作,肌肉往往是系統性地募集,中樞神經系統在選擇激活肌肉時有一定標準。數學上,可以將解肌肉募集方程轉化為方程解的優化問題。AnyBody軟件提供了線性、二次/三次多項式、最小最大及復合肌肉募集共五種肌肉募集方式,但可以用一個多項式表達,即式中:G為假定的中樞神經系統對肌肉受力的分配策略,Ni為當前工作環境下每一塊肌肉的拉伸強度;f(M)表示平衡外載荷的肌肉力;fi(M)表示第i塊肌肉力,由于肌肉只能承受拉力,所以其數值大于等于零;p為多項式的冪級數,可根據具體工將p設為不同數值。所AnyBody采用標準肌肉募集方式的是多項式肌肉募集方式和最小最大肌肉募集方式,這樣可以避免遇到由負轉正的力矩臂的突變和高次多項式募集不穩定的情況。在坐站轉移和步態行走的運動過程中,參與作用的髖部和下肢肌肉群眾多,故主要對使膝關節、髖關節內屈的縫匠肌,使髖關節屈伸的股直肌,使髖關節內屈的髂腰肌,使股骨外展、屈伸和旋轉的臀中肌,使股骨后伸和外旋的臀大肌進行分析,肌肉的解剖學位置如圖3所示。
2 ?逆向動力學仿真
2.1 ?坐姿到站立過程仿真
坐站轉移是日常生活中最常見的運動之一,也是進行其他各項日常生活的前提。日常生活中人每天需要進行多次坐站轉移活動,但對于術后康復患者來說這一動作卻是非常困難的。臨床研究和治療中常利用坐站轉移來評估患者的功能活動能力。國內對坐站轉移過程的研究主要依賴足底壓力的測量,但這種方法存在很多局限性[13]。而AnyBody多體動力仿真可以定量的追蹤運動過程中骨肌系統的運動學參數和動力學參數的變化,為患者的康復訓練提供了更加有效的研究方法。坐站轉移過程如圖4所示。根據運動過程髖關節角度變化,將其劃分為三個時期,即I期:從坐位到前傾最大時(臀部即將離開接觸面),Ⅱ期:從臀部離開接觸面到髖關節角度與坐位髖關節角度相等,Ⅲ期:從達到初始髖關節角度時到髖關節達到站立中立位(髖關節角度為0°)。由于在文獻中沒有關于完整的坐站轉移過程的運動學的數據,所以從椅子坐起來的活動通過調整關節角度來模擬。坐骨節點被定義為座椅高度的參考點。通過改變踝關節和膝關節的角度,來調節坐骨節點的高度。因為46 cm和53 cm的座椅高度是行業中的標準座椅高度,所以本文調節坐骨節點的高度為53 cm。基于張勤良[13]等人的統計數據,設定坐站轉移過程在1.5 s內完成。
2.2 ?步態周期運動仿真
步態是人體依靠足趾、踝、膝、髖的一系列配合使身體運動的一種常見活動方式[14]。步態周期分為兩個階段,支撐期和擺動期。支撐期約占整個步態周期的60%,擺動期約占整個步態周期的40%,步態周期劃分如圖5所示。本文主要研究在常速行走下,步態周期8個特征階段的髖關節力和附著在骨盆上的21條肌肉力。根據中國不同年齡段正常成人的步態特征研究結果[15],設置1.07 s為一個步態仿真周期,仿真步數設置越密集,仿真結果在單位時間越精確,計算所用時間越長,綜合考慮后設為100步。為使模型與C3D數據文件相適應,本文先對步態模型進行優化操作,再進行逆向動力學仿真,最后通過調用函數提取整個步態分析仿真周期中每一階段肌肉力、關節力和邊界條件文件。
3 ?仿真結果分析
3.1 ?坐站轉移過程仿真輸出及結果分析
3.1.1 ?關節力
由AnyBody逆向動力學分析所得的坐站轉移過程的髖骨關節力如圖6所示,與MarioKunze[16]等人的數據對比發現曲線趨勢基本吻合,說明仿真模型可有效模擬坐站轉移過程的運動情況,得出的數值結果可信。坐姿到站立過程所受的髖關節力在Y軸方向最大,坐姿狀態髖關節受力近似是站立時的兩倍。Y軸方向的受力曲線趨勢為初始時有較大載荷,隨時間逐漸降低在即將到達末尾時又有增大。分析認為運動初始時髖關節提供了較大反作用力使姿態由靜到動,而在運動的中期,坐站轉移的重心移動主要靠慣性完成,髖關節受力逐漸減小,最后在運動即將結束時,髖關節又提供了一定反作用力來使運動減速為零。
3.1.2 ?肌肉力
圖7所示為坐站轉移過程中髖部肌肉力的變化,股四頭肌是人體最大最有力的肌肉群,它由股外側肌、股內側肌、股中間肌和股直肌四部分組成,在坐站轉移過程中起重要作用。從圖7中可以看出,4條肌肉力曲線初始時均為最大值,之后逐漸降低,其趨勢與關節力基本相同。分析認為在坐站轉移運動中股四頭肌在臀部剛剛離開座位時即被充分加載以提供起身所需的力,之后的重心轉移過程主要依靠慣性完成,肌肉力逐漸降低,最后站立狀態時股四頭肌不再起作用。對比組成股四頭肌的四部分肌肉發現,股外側肌的肌肉力峰值最大達到1400 N,股直肌的肌肉力峰值最小僅為370 N。解剖學上看,股外側肌是股四頭肌群中最
為發達的肌肉,所以肌肉力最大,而股直肌是股四頭肌群中唯一的雙關節肌,肌肉力不僅作用于膝關節使其完成屈伸動作,還對髖關節三個方向轉動的自由度起約束作用,為使坐站轉移過程髖關節和膝關節協調動作,所以肌肉力變化較為平緩。
3.2 ?步態仿真輸出及結果分析
3.2.1 ?關節力
步態運動時人體的右髖骨關節力如圖8所示,與羅偉等[17]的數據對比發現曲線趨勢基本吻合,說明仿真模型可有效模擬步態周期的運動情況,得出的數值結果可信。由圖8可知,髖骨關節力在垂直軸方向最大且變化最明顯。支撐反應期有一個局部峰值并存在波動,這是因為支撐反應期右足足跟剛接觸地面,產生了沖擊性的反作用力。在支撐早期隨著右腳掌與地接觸面積的增大,受力平緩下降,當腳掌與地面完全接觸時達到局部最小值。支撐中期,右腳開始蹬離地面,受力逐漸增大,直到支撐末期,右腳趾離地前達到最大值2400 N。髖關節力在擺動初期迅速降低,在整個擺動期維持較小的力。從整個步態周期來看,多數時間是單足著地的,雙足著地的時間非常短,所以步態時的髖骨關節力比雙腿站立時大很多。
3.2.2 ?肌肉力
由解剖學可知有21塊不同的肌肉附著在髖骨上[18],肌肉力輸出如圖9所示。對比發現各個肌肉群受力的大小和峰值點都各不相同。臀中肌和臀大肌在步行中承受的力較大,其中臀中肌負責髖關節的外展及外旋,在步態中受力曲線的趨勢與髖關節基本一致,單塊肌肉峰值可達到200 N。臀大肌對髖關節伸展具有重要作用,在擺動初期會強烈收縮以維持髖關節穩定,單塊肌肉峰值可達300 N。髂腰肌和縫匠肌在步行中承受的力相對較少,髂腰肌在單腿支撐期起維持骨盆穩定的作用,此時峰值可達到50N。縫匠肌在抬腿屈曲時起主要作用所以在支撐相末期有較大肌肉力,峰值可達到60 N。參與髖關節主要運動的臀中肌、臀大肌1、髂腰肌和縫匠肌變化趨勢一致,在0.2秒和0.65秒達到波峰,而臀大肌2和臀大肌3對髖關節運動無主要影響。圖中每個曲線都有兩個峰值,并且其大小不相同,日常行走時,步態與步態之間不能保證完全一致,因此仿真的結果比較符合實際情況。
4 ?結論
本文基于AnyBody軟件平臺,分別建立了人體坐姿到站立過程和步態周期的骨肌模型,對其逆向動力學仿真和計算求解后,得到了這兩種行為動作下髖骨的關節力和髖部肌肉力的輸出曲線,分析了人體坐姿到站立過程和步態周期中關節力和肌肉力的變化情況,從分析結果可知,坐姿關節力較站立時關節力更大,而步態階段多為單足著地,關節力峰值最大;不論坐姿到站立過程還是步態運動時,肌肉力都比關節力更小一些,坐姿到站立過程及步態運動時,肌肉力比關節力相對要小一些。本文所獲得的載荷工況不僅能為髖骨力學特征研究和性能分析提供更準確更符合實際的力學環境,而且對骨科疾病如骨折治療常用的內固定物性能評估和骨折功能恢復有一定影響,所用的方法還可以應用到人體其它骨骼受力分析和康復運動的研究上。
參考文獻
[1]徐超, 嚴亞波, 巴晶晶, 等. Dega骨盆截骨術后最佳中心邊緣角的三維有限元分析[J]. 現代生物醫學進展, 2016, 16(1): 34-39.
[2]Yucens M, Alemdaroglu K B, Ozmeric A, et al. A comparative biomechanical analysis of suprapectineal and infrapectineal fixation on acetabular anterior column fracture by finite element modeling[J]. Turkish Journal of Medical Sciences, 2019, 49(1): 442-448.
[3]代元元, 章瑩, 夏遠軍, 等. 長板與拉力螺釘固定治療髖臼后柱骨折的建模及穩定性比較[J]. 中國臨床解剖學雜志, 2016, 34(2): 214-219.
[4]高加智, 辛杰, 王洪玉. 不同橋接組合式內固定系統重建骨盆后環穩定性的有限元分析[J]. 中國矯形外科雜志, 2020, 28(4): 342-348.
[5]劉敏, 周曉賽, 王俊誠, 等. 不同方法治療不穩定骨盆骨折中前環損傷的有限元分析[J]. 中國骨傷, 2019, 32(2): 156-160.
[6]劉書朋, 司文, 嚴壯志, 等. 基于AnyBodyTM技術的人體運動建模方法[J]. 生物醫學工程學進展, 2010, 31(3): 131-134.
[7]胡耿丹. 運動生物力學[M]. 上海: 同濟大學出版社, 2013.
[8]顧景范. 《中國居民營養與慢性病狀況報告(2015)》解讀[J]. 營養學報, 2016, 38(6): 525-529.
[9]Anybody4. 2. 0Tutorial中文版使用指南.
[10]Frankenfield D C, Rowe W A, Cooney R N, et al. Limits of body mass index to detect obesity and predict body composition[J]. Nutrition, 2001, 17(1): 26-30.
[11]徐歡歡, 何育民, 孫朝陽, 等. AnyBody環境下人體步態的逆向動力學研究[J]. 機械科學與技術, 2019, 38(12): 1819-1824.
[12]Hill A V. The heat of shortening and the dynamic constants of muscle[J]. Proc Royal Soc (London), 1938, 126(843): 136- 195.
[13]張勤良. 正常成人坐站轉移髖關節及足底壓力運動學參數的研究[D]. 安徽醫科大學, 2012.
[14]Kainz H, Modenese L, Lloyd D G, et al. Joint kinematic calculation based on clinical direct kinematic versus inverse kinematic gait models[J]. Journal of Biomechanics, 2016, 49(9): 1658-1669.
[15]胡雪艷, 惲曉平, 郭忠武, 等. 正常成人步態特征研究[J]. 中國康復理論與實踐, 2006, 12(10): 855-857+921.
[16]Kunze M, Schaller A, Steinke H, et al. Combined multi-body and finite element investigation of the effect of the seat height on acetabular implant stability during the activity of getting up[J]. Computer Methods and Programs in Biomedicine, 2011, 105(2): 175-182.
[17]羅偉. 髖骨的三維重建技術與生物力學仿真研究[D]. 中北大學, 2017.
[18]Dalstra M, Huiskes R. Load transfer across the pelvic bone[J]. Journal of Biomechanics, 1995, 28(6): 715-724.