WiFi環境下多功能輪椅床研究與設計
2020-12-14 04:35:10周小華吳濤楊叢叢
軟件導刊 2020年9期
周小華 吳濤 楊叢叢
摘 ?要: 利用樹莓派軟件設計并開發了一種WiFi環境下的遙控多功能輪椅床,智能手機作為多功能輪椅的主要控制終端,以樹莓派為基礎作為該多功能輪椅床的核心控制器,其中控制系統的程序采用Python語言進行開發。樹莓派對舵機的控制可實現多功能輪椅床的轉換變形,同時樹莓派對電機的控制實現多功能輪椅的移動,通過超聲波測距模塊可以實時監測多功能輪椅與周邊的情況,實現相應的自主避障功能。該多功能輪椅主要由輪椅床底盤模塊、電機驅動模塊和超聲波測距等多個功能模塊構成。多功能輪椅與智能手機之間的通信方式采用WiFi通信,用戶能夠使用智能手機遠程遙控來實現多功能輪椅的轉換變形、移動和避障等。
關鍵詞: 多功能輪椅;樹莓派;電機驅動;超聲波避障;WiFi
中圖分類號: TP242.3 ???文獻標識碼: A ???DOI:10.3969/j.issn.1003-6970.2020.09.038
【Abstract】: Using Raspberry Pi software to design and develop a remote control multifunctional wheelchair bed under WiFi environment, the smartphone is the main control terminal of the multifunctional wheelchair, and the Raspberry Pi is used as the core controller of the multifunctional wheelchair bed. The program of the control system is developed using Python language. The control of the raspberry party steering gear can realize the transformation and deformation of the multifunctional wheelchair bed. At the same time, the control of the raspberry party motor can realize the movement of the multifunctional wheelchair. The ultrasonic ranging module can monitor the situation of the multifunctional wheelchair and its surroundings in real time to achieve the corresponding autonomous obstacle avoidance function. The multifunctional wheelchair is mainly composed of multiple functional modules such as a wheelchair bed chassis module, a motor drive module, and ultrasonic ranging. The communication method between the multifunctional wheelchair and the smartphone uses WiFi communication, and users can use the smartphone to remotely control the transformation, movement, and obstacle avoidance of the multifunctional wheelchair.
【Key words】: Multifunctional wheelchair; Raspberry Pi; Motor drive; Ultrasonic obstacle avoidance; WiFi
0 ?引言
伴隨著人口老齡化的問題日漸突出,體弱的老年人士的生活狀態也越來越被人們關注和重視,尤其在出行和自由活動方面。因此本次設計針對該問題,采用智能手機在WiFi的環境中可以遠程控制多功能輪椅的轉換變形、移動和避障。采用樹莓派(RaspberryPi)作為多功能輪椅的“大腦”,可通過編程來管理多功能輪椅的操作(轉換變形、移動等)。本次設計旨在服務那些下半身癱瘓人群、腿腳行動不便人群和體弱的老年人士,通過遠程控制多功能輪椅實現從床上到輪椅上,并能在無人照看情況下進行基本的活動,能夠滿足這些特殊人群的日常生活。
1 ?硬件選擇與設計
1.1 ?結構設計
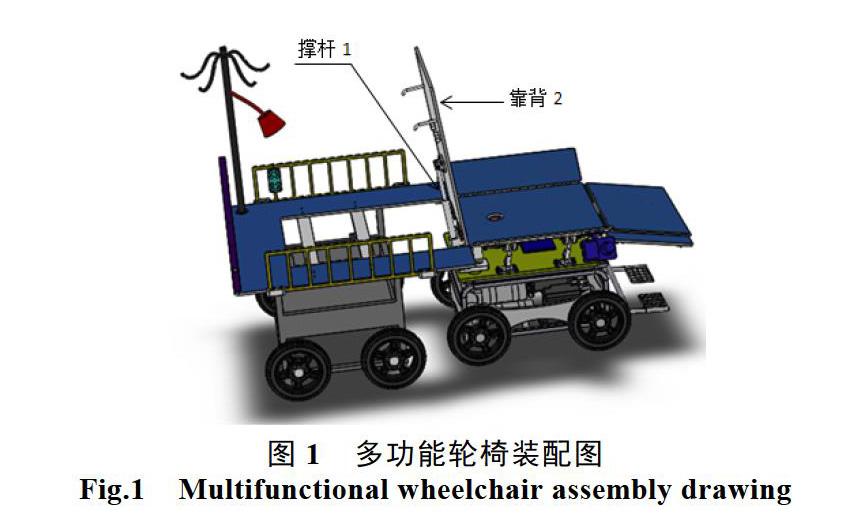
采用SolidWorks軟件對該多功能論文進行的三維建模如圖1所示,從圖1中可以看出,當撐桿1推出的時候,病床的底板撐起,變形成輪椅靠背2;撐桿1收回的時候,靠背2變形為床板。
1.2 ?電機驅動模塊
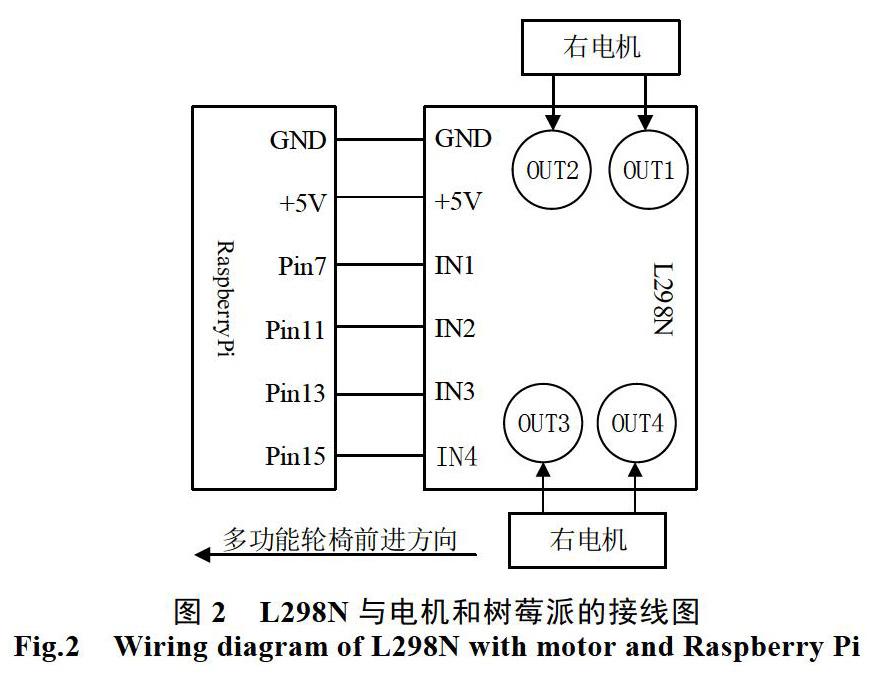
圖1中前面的輪椅部分的4個輪子的驅動直流電機與相應的電機驅動模塊L298N連接,驅動模塊L298N通過樹莓派自帶的GPIO口進行控制[1]。電機的正反轉由電機輸入信號的邏輯關系來決定,其速度通過使能端ENA、ENB輸入PWM信號來控制和調節[2]。如圖2所示為電機、L298N模塊和樹莓派的連接方式。L298N模塊的邏輯輸入端為IN1~IN4,這4端口分別與樹莓派的4個GPIO口相連。
1.3 ?輪椅轉換變形模塊
(1)輪椅轉換變形驅動模塊設置
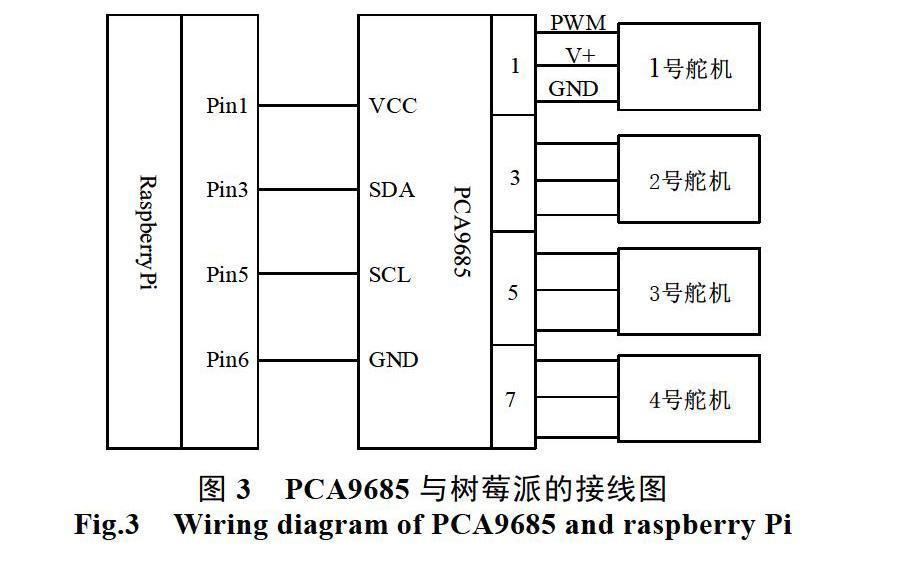
輪椅轉換變形模塊需要四個舵機分別驅動其對應的零件的轉動,選用驅動電路板PCA9685與舵機連接的接線圖如圖3所示。四個舵機分別連接在型號為PCA9685的舵機驅動板上,舵機驅動板同時與樹莓派連接。輪椅車底盤是固定的,1號舵機能夠控制多功能輪椅背椅的轉動,2號和3號舵機分別控制多功能輪椅左扶手和右扶手的轉動,而多功能輪椅腳踏板的運動通過4號舵機進行控制。最后,多功能輪椅的轉換變形由1至4號伺服舵機的控制來實現。
1.4 ?避障功能
本文所設計多功能輪椅的避障原理是:首先初始化及超聲波模塊及樹莓派的GPIO端口,然后由控制器發送觸發電平并讀取返回電平。接著通過計算與障礙物的距離來判斷是否有障礙物,若計算距離大于10?cm,則判斷前方有障礙物,否則無障礙物[6]。在避障模塊的設計中利用超聲波模塊和對樹莓派進行編程,最終實現輪椅的避障功能。
2 ?多功能輪椅的運動控制
2.1 ?控制系統總體設計方案
通過WiFi使用者將操作指令經由樹莓派發送給各功能模塊,使多功能輪椅完成相應的操作,本次設計中多功能輪椅床的系統結構框圖如圖4所示。
3 ?結語
本文設計并開發了一種基于樹莓派的無線遙控多功能輪椅,可實現多功能輪椅的轉換變形、移動和避障。樹莓派作為核心主控板,通過L298N實現利用電機控制多功能輪椅的移動,通過PCA9685實現利用舵機控制多功能輪椅的轉換變形,通過WiFi模塊與手機交換信號,實現手機遠程控制多功能輪椅,通過超聲波測距模塊來實現多功能輪椅在移動的過程中自主的躲避障礙物。實驗表明多功能輪椅具有較好的遠程控制、轉換變形和自主避障功能,在智能化的輪椅中具有一定的實用創新價值。該多功能輪椅系統簡單,精度較高,實用性較強,為多功能輪椅實現現實生產提供了理論依據。
參考文獻
[1]凡佳輝, 劉冉, 韓飛, 等. 基于樹莓派的智能機器人控制研究[J]. 信息技術與信息化, 2018(04): 142-144.
[2]胡志超, 孔錦明, 魏豪特. 基于樹莓派的移動監控小車設計[J]. 科技廣場, 2017(12): 78-80.
[3]李強, 霍淑珍, 鄭偉. 基于I2C通信的PCA9685在舵機控制中的應用[J]. 科技創新與應用, 2018(28):173-174.
[4]周英路, 王志亮, 朱松青, 等. 基于PCA9685的多路舵機控制器設計[J]. 南京工程學院學報(自然科學版), 2017, 15(04): 26-31.
[5]楊叢叢, 吳濤, 張安峰, 等. 基于樹莓派的無線遙控移動機器人設計及運動控制[J]. 軟件, 2020, 41(02): 97-101.
[6]劉勝金, 周海燕, 楊溢凡, 等. 基于樹莓派的智能小車系統[J]. 電腦知識與技術, 2019, 15(14): 158-160.
[7]胡志超, 孔錦明, 魏豪特. 基于樹莓派的移動監控小車設計[J]. 科技廣場, 2017(12): 78-80.
[8]王小宇. 基于Raspberry Pi的輪式移動機器人設計及運動控制[D]. 山東理工大學, 2018.
[9]江國強, 謝安潔, 漆虹琳, 等. 基于Arduino的舵機機械控制研究[J]. 企業科技與發展, 2020(04): 39-41.
[10]孟祥薇, 嚴錫君, 歐陽星辰, 等. 基于超聲波傳感器的導盲杖設計[J]. 電子設計工程, 2012, 20(17): 11-14.
[11]吳波濤, 孔金平, 王湘. 基于Arduino和樹莓派的智能小車的設計與實現[J]. 電子設計工程, 2017, 25(15): 58-61.