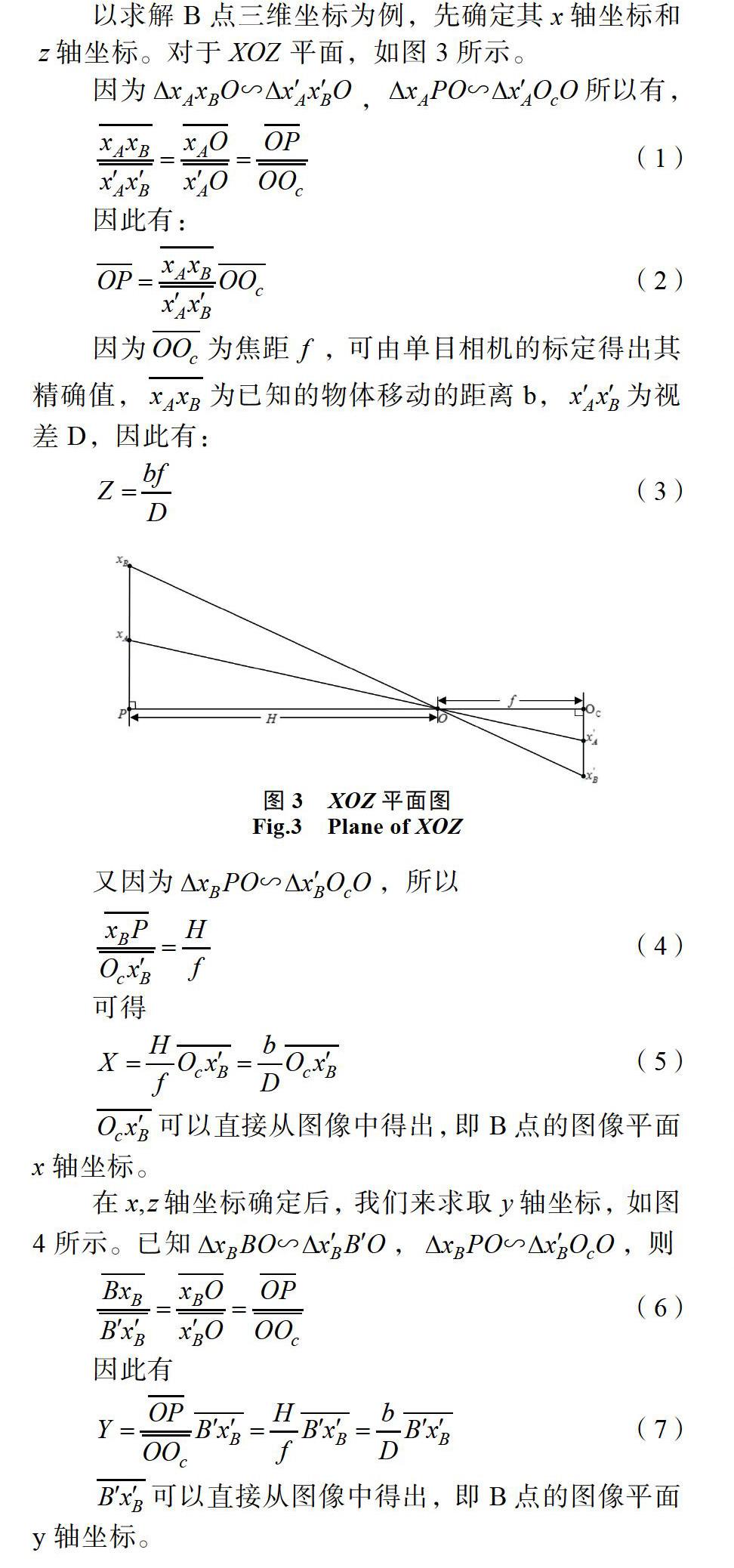
基于目標移動的單目立體視覺系統研究
2020-12-14 04:35:10陳澤詣華云松
軟件導刊 2020年9期
陳澤詣 華云松


摘 ?要: 近年來,立體視覺在生產生活中發揮著重要的作用。傳統的單目立體視覺通常使用移動單目相機的方法完成圖像采集功能。本文提出了一種基于目標移動的單目立體視覺系統,以立體視覺原理為理論依據,對相應硬件與軟件系統進行設計,搭建了基于目標移動的單目立體視覺系統。通過使用MATLAB等工具進行單目標定,采用基于窗口的稀疏點匹配方法進行圖片的匹配,使用物體移動實驗驗證了該系統是可行的。
關鍵詞: 單目立體視覺;單目標定;目標移動;三軸運動控制器
中圖分類號: TP391. 41 ???文獻標識碼: A ???DOI:10.3969/j.issn.1003-6970.2020.09.039
【Abstract】: In recent years, stereoscopic vision plays an important role in production and life. Traditional monocular stereo vision usually uses the method of mobile monocular camera to complete the image acquisition function. In this paper, a monocular stereo vision system based on target movement is proposed. Based on the principle of stereo vision, the corresponding hardware and software systems are designed, and the monocular stereo vision system based on target movement is built. Through the use of MATLAB and other tools for single target determination, the sparse point matching method based on the window is adopted for image matching, and the object movement experiment is used to verify the feasibility of the system.
【Key words】: Monocular stereo vision; Single target setting; Moving target; Triaxial motion controller
0 ?引言
機器視覺作為一種人工智能識別系統,在醫學、軍事、工業、農業等領域中都有廣泛應用[1]。一個基本的機器視覺檢測系統由光源、相機和圖像采集卡、計算機等組成。對移動物體的單目立體視覺研究是一個較新的立體視覺研究方向。在過去的研究中,大多數單目立體視覺系統采用物體靜止、相機移動的方式獲取圖片信息,少部分系統采用鏡面對稱等方式利用單目相機模擬雙目立體視覺系統,而少有研究者采用物體移動的方式獲取圖片信息。使用該種方式能夠較好的運用標定、物體移動軌跡預測等方法,得到較高的系統精度。
1 ?基于目標物移動的單目立體視覺原理
本文提出了一種基于單相機多工位的求取物體三維坐標位置的方法。
如圖1所示,目標物體可以在三軸運動控制器的控制下精確移動。當相機鏡頭固定不動時,目標物體從圖像采集位置A點平移到圖像采集位置B點,采集目標物體在不同的點位的圖像,利用這些圖像進行分析即可求取出目標物體在空間中的三維坐標。我們以目標物沿著x軸的方向移動一次為例。物體的移動的距離已知。如圖2所示,將被測物體在初始位置時某一特征點的位置設為A點,將物體在移動后同一特征點的位置稱為B點。我們假設相機坐標系與世界坐標系重合,設點為相機光心,、分別為A點,B點在平面上的投影點,直線與z軸相交于點,圖像平面坐標系原點設為。
2 ?相機標定
相機標定的目的是利用空間物體上的某點位的三維坐標與它在圖像上對應點之間的相互對應關系來確定相機的內部參數與外部參數[2]。相機需要標定的參數如下:
圖4 ?測量原理透視圖
Fig.4 ?Principle perspective of measurement
外部參數R為正交矩陣,共有9個未知數;t為三維平移向量,共有3個未知數。
內部參數包括相機的內參數矩陣和相應的畸變系數,它包括有效焦距,;主點坐標,畸變系數。
本文提出的基于目S移動的單目立體視覺系統中只需要一個相機,且該相機固定不動,因此我們將此單目相機坐標系與世界坐標系重合,進而只需要標定出相機的內部參數。本文的單目標定實驗部分采用了經典的張正友平面標定法[3],它從平面的單應性著手,提出了一種根據拍攝不同位置和朝向的平面棋盤格圖像模板來求解相機的內參數和畸變參數,相較于其他方法更為穩定。
2.1 ?張正友平面標定
張正友平面標定法的標定步驟如下:
固定相機位置不改變,從多個角度任意轉動棋盤格標定板,同時保證標定板在相機視野內,分別拍攝得到若干張它的圖像。隨后分別檢測出圖像中的特征點并做好標記[4],再利用相關公式或者使用軟件求取相機內部參數和畸變系數;
2.2 ?標定實驗
采用MATLAB標定工具箱來進行基礎的單目視覺標定工作,以獲取所使用的單目相機的內部參數[5]。將標定板放置于三軸運動控制器的物體平臺上,前后翻轉較小角度,共采集15張圖片。
3 ?立體匹配
圖像匹配的功能是將物體在移動前后的特征點一一對應,由此計算出物體在圖像中的移動的距離與方向,并與物體實際運動的數據、相機的焦距等數值計算得出物體的三維坐標。因此,使用優秀的圖像匹配算法能夠使計算所得數據更為準確,提升系統的穩定性。
本文采用基于窗口的稀疏點匹配方法,得到目標的特征點的三維信息。以下先介紹基于窗口的匹配原則。
假如對圖像點和進行匹配計算,那么對它們的匹配結果與以和點為中心的窗口內的圖像點之間進行匹配計算得到匹配結果是一致的[7]。該方法能夠把匹配誤差有效地規避掉。
基于窗口的稀疏點的匹配選取可以明顯反映出圖像本質屬性的特征點,使其作為匹配對象。當特征點的數量越多,匹配的結果也就越可靠,進而其精度也就越高。因此,可靠的特征點的數量對于匹配效果具有決定性作用。
在完成了特征點的提取后,以物體單次運動之前的視圖作為基準,匹配物體單次運動之后的視圖。實現的過程如下:先在前視圖中選定物體的一個特征點,并對它與后視圖中同一行里所有的特征點進行向量夾角的計算,得到特征點的匹配點對。記兩點間軸上的間距為視差值,越大則表示三維點離相機的距離越近,相反則越遠。
4 ?系統實驗
以物體在x軸上運動為例設計實驗驗證。選用一個小球作為目標物體,經游標卡尺測量得其直徑為28.8 mm。將其放置于三軸運動控制器的物體平臺上并固定[8]。保持三軸運動控制器的物體平臺的y、z軸位置不變,變化三軸運動控制器的物體平臺在x軸上的位置。具體步驟如下:
首先使用控制器將設定小球放置的物體平臺的當前位置為基準位置,在三軸運動控制器中此位置的坐標被設為了,而當前位置在相機坐標系下的坐標是未知的。在基準位置使用單目相機對小球進行拍攝,如圖9所示。
然后使用控制器將三軸運動控制器的物體平臺的x軸向正方向移動50 mm,并再次拍攝圖像。繼續移動,重復此步驟5次。共得到小球在x軸上的6個不同位置的圖像。使用本文所述的基于目標移動的單目立體視覺系統的算法對移動前后的圖片兩兩間進行特征點匹配與數據計算,并使用前文求得的單目相機焦距,得到小球的一個特征點在6個位置的實際空間位置坐標。
由實驗數據可以發現,由于圖像的噪聲等干擾,在圖像經過預處理后仍然會存在特征點的匹配有所誤差,導致該特征點的圖像坐標變化不同,影響到計算得出的特征點的深度[9],進而影響到該點的空間的橫縱坐標。計算該點的y軸與z軸坐標的的最大與最小值之差與均值之比,得到其誤差均在3%以內。
5 ?結論
本文建立了一套基于目標移動的單目立體視覺系統,使用新的方法分別對單目相機標定、目標物位置求取算法等進行了研究,并通過初步實驗驗證,整套系統基本滿足需求。實驗部分使物體在x軸上進行已知設定位置的運動,通過基于目標物移動的單目三維坐標確定原理的算法得到物體實際坐標。分析比對通過計算得到的實際坐標與現實測量得到的坐標的誤差。下一步可以使物體在多軸方向上同時運動,使用該系統求取其實際位置。
參考文獻
[1]董志如. 基于生物學啟示的視觸三維重構方法研究及應用[D]. 河北: 河北工業大學, 2009.
[2]湯溢, 陳曦, 劉祥磊. OpenCV的相機標定在高速相機中的應用[J]. 北京測繪, 2018, 5: 578-582.
[3]劉玉婷, 徐祥宇, 王超, 等. 攝像機標定系統方法的研究[J]. 智能計算機與應用, 2019, 3: 133-136, 141.
[4]劉曉. 基于圖像處理的包裝袋快速定位方法研究[D]. 山東: 山東科技大學, 2015.
[5]汪永超, 耿麗清. 攝像機標定系統方法研究[J]. 天津職業技術師范大學學報, 2019, 2: 59-62.
[6]崔韜. 基于立體視覺的零件三維尺寸測量[D]. 河北: 河北工業大學, 2015.
[7]周鵬. 基于OpenCV的雙目立體視覺系統定標與三維重構技術研究[D]. 寧夏: 寧夏大學, 2015.
[8]劉建群, 劉綠山, 羅繼合. 嵌入式四軸運動控制器的設計[J]. 制造業自動化, 2008, 2: 51-53.
[9]張開洪, 羅林, 顏禹. 基于立體視覺的橋梁裂縫自動檢測系統研究[J]. 重慶交通大學學報(自然科學版), 2014, 5: 37-41, 110.