無人機載激光雷達在山區地形圖測繪中的應用
2020-12-14 04:03:48李衛良龍世林
科技創新與應用 2020年36期
李衛良 龍世林
摘? 要:文章以江西省廣豐區七星水庫引水工程地形圖測繪項目中獲取的機載激光點云為例,介紹了機載激光雷達測量系統在植被深厚地區的數據分類處理及DEM產品制作,輔助地形圖繪制使測繪成果滿足規范標準[1]。通過這一案例,論證了機載激光雷達測量系統在植被深厚地區極大地減少了外業及內業數據整理工作量,縮短了作業工期,解決了人工RTK和傳統航空攝影測量技術在植被深厚且茂密地區作業的技術難題,使山區地形圖的高程精度得到了很大的提升。
關鍵詞:機載激光雷達;地形圖;應用
中圖分類號:P237 文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2020)36-0145-03
Abstract: Taking the airborne laser point cloud obtained from the topographic map surveying and mapping project of Qixing Reservoir Water Diversion Project in Guangfeng District of Jiangxi Province as an example, this paper introduces the data classification processing and DEM product making of airborne LIDAR measurement system in the areas with deep vegetation, and auxiliary topographic map drawing to make the surveying and mapping results meet the standard. Through this case, it is demonstrated that the airborne LIDAR measurement system can greatly reduce the workload of field and interior data processing, shorten the operation period, solve the technical problems of manual RTK and traditional aerial photogrammetry in the areas with deep and dense vegetation, and greatly improve the elevation accuracy of topographic map in mountainous areas.
Keywords: airborne LIDAR; topographic map; application
機載激光雷達系統(LIDAR)是一種集激光、全球定位系統和慣性導航系統三種技術于一身的空間測量系統[2]。該系統是將激光掃描儀、GPS接收機、慣性導航系統、數碼相機及控制單元等搭載在飛機上, 通過主動向地面發射激光脈沖,接收地面反射回來的反射脈沖并同時記錄所用時間,從而計算出激光掃描儀到地面的距離,結合POS 系統測得的位置和姿態信息可計算出地面點的三維坐標。
1 項目區介紹
本文主要介紹了江西省廣豐區七星水庫引水工程大比例尺地形圖測繪,項目區位于江西省上饒市廣豐區南部,屬武夷山脈東段北麓,位于北緯28°16′~28°27′;東經118°27′~118°34′之間,線路總長度約13公里。境內地勢南高北低,多為崇山峻嶺,坡度陡峭,植被茂密,屬于國家森林公園,多處為原始森林,多以竹林、杉樹、臺灣松、木荷、米櫧等喬木為主。地形地貌復雜,傳統的人工外業數據采集難度系數高,測繪精度難以保證。本項目采用大黃蜂BB-4無人機平臺搭載華測AS-300HL多平臺激光雷達測量系統執行外業點云數據采集工作。
2 外業數據采集
執行航攝任務前首先應按照規定向有關部門申請空域以取得航飛權,在保證滿足項目要求的前提下, 同時應滿足《IMU/GPS輔助航空攝影規范》的要求。
2.1 基站架設
數據采集之前在已知控制點架設GNSS基站,使用華測i80接收機。基站架設滿足以下要求:
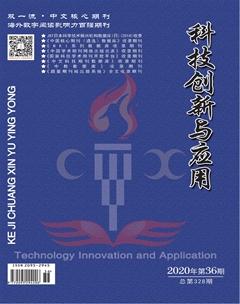
(1)基站架設于已知控制點后進行嚴格的對中和整平。(2)天線高測量采用量斜高方式,分別從腳架三個空檔(互成120°)測量天線高量測基準面(測高板)至控制點中心標志面的距離,讀數精確至1mm,互差應小于3mm,最后取平均值作為天線高,天線高量取方式如圖1所示。(3)基站采樣率設置為5Hz。(4)基站觀測數據要求必須有GPS和BDS,并且兩者衛星數之和不少于18個,要求保存HCN格式數據和Renix3.02數據各一份。
2.2 航線規劃與航線探測
基站架設的同時,無人機技術人員對現場環境進行踏勘,并結合實際環境使用DJI GS Pro地面站自定義規劃航線,航線規劃完成后,首先使用大疆精靈 4 PRO無人機對規劃航線進行探測。待航線探測完畢,方可進入正式無人機載雷達數據采集環節。
2.3 數據采集
待航線探測結束達到可飛行條件后,對機載雷達系統進行設備安裝完畢后,開始數據采集。華測AS-300HL多平臺激光雷達測量系統數據采集通過RC-8手持控制器控制,其通過無線通訊方式,可達到8km的傳輸距離,在無人機飛行過程中亦可實時監控系統各個傳感器的工作狀態。
數據采集分為以下步驟:(1)傳感器參數設置:主要包含激光掃描儀和相機參數設置。(2)開始工程:開始工程即開始POS數據采集,待工程開始后,需要使設備及無人機保持靜止狀態并持續5分鐘,目的是為了確保獲得更多靜態歷元后期進行平差處理。(3)“8”字飛行與慣導初始化:“8”字飛行的目的是為了讓慣導更快地進入穩定狀態,待“8”字飛行結束后方可正式數據采集。(4)開始采集:在“8”字飛行快要結束前,點擊“開始采集”,同步開啟激光數據和影像數據采集。(5)停止采集:航線飛行完畢后,點擊“結束采集”關閉激光和影像數據采集。(6)無人機降落與靜止:結束采集后,無人機降落,繼續靜止5分鐘。(7)停止工程:靜止完畢后,停止工程,結束POS數據采集。(8)數據拷貝:整個工程結束后,在通電狀態下連接相機數據拷貝線纜拷貝影像數據,斷電后可連接數據傳輸線拷貝POS數據,通過數據存儲卡拷貝原始激光數據。
3 數據處理
3.1 原始數據
激光雷達測量系統一次采集得到的原始數據主要包括以下幾種:(1)GNSS基準站數據,為基站觀測得到的GNSS數據。(2)POS采集數據,主要包括移動站GNSS數據與慣導數據。(3)激光數據,為激光掃描儀掃描數據。(4)影像數據,即相機拍攝的照片。
3.2 基站數據處理
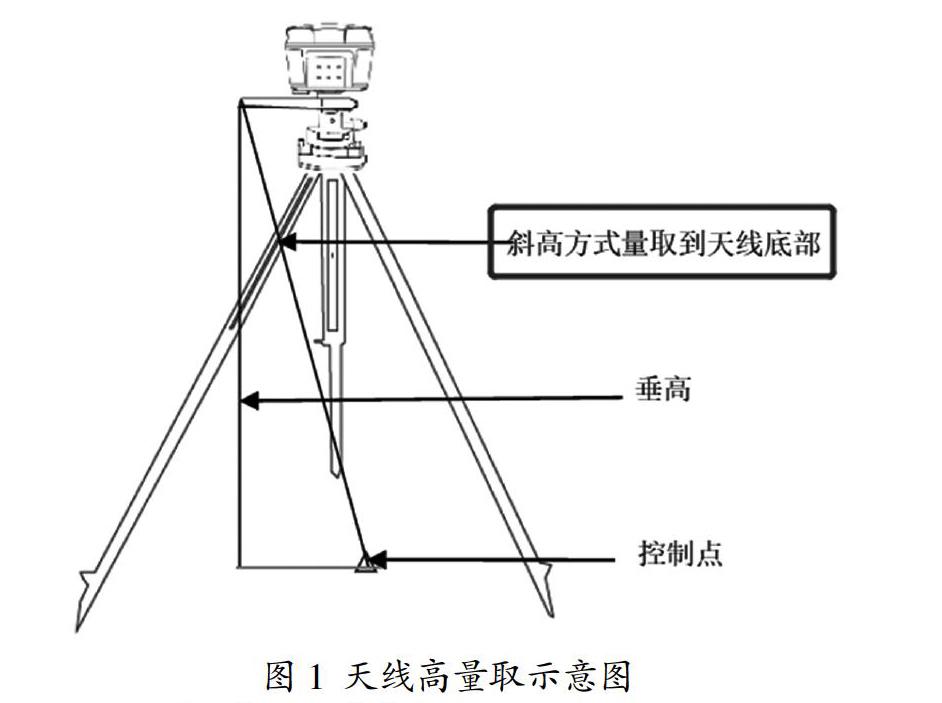
基站數據處理主要是將原始的HCN文件進行格式轉換和天線設置,生成Renix3.02文件,使用CHCData軟件完成,如圖2所示。
3.3 POS解算
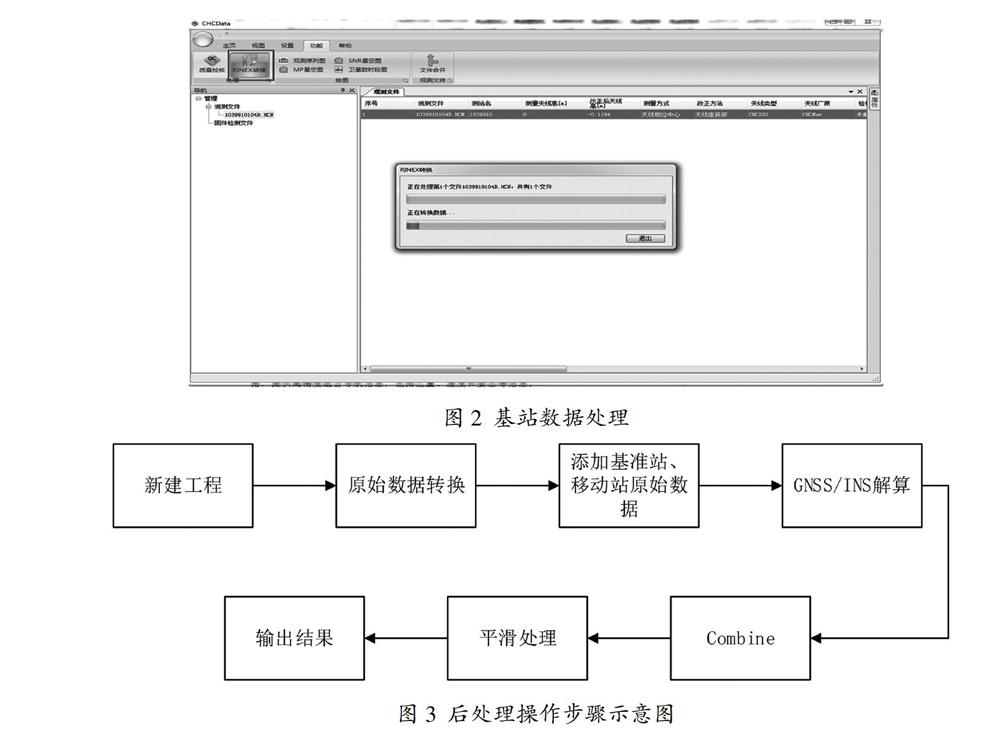
POS解算采用Inertial Explorer8.7后處理軟件進行。該軟件可用于處理所有可用的GNSS、INS 數據,提供高精度組合導航信息,包括位置、速度和姿態等信息,如圖3所示。
3.4 生成點云
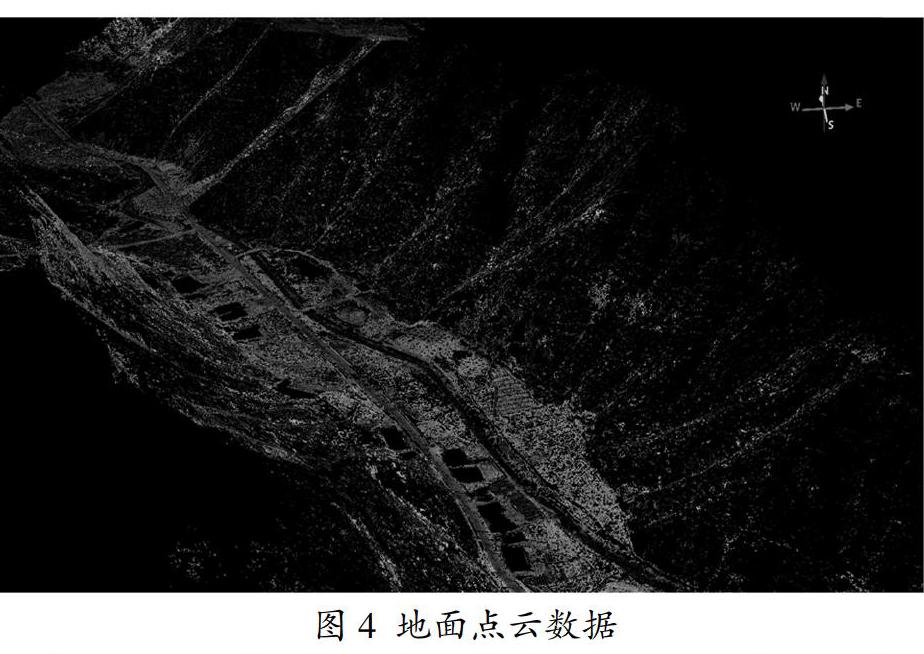
使用CoPre軟件將原始激光數據與POS數據進行融合解算,轉換生成CGCS2000坐標系下的las格式點云。將生成的點云數據進行分類處理[3],最后生成等高線、高程點成果,具體流程為:點云自動分類→根據實測點檢查合格→人工編輯分類結果→地面點→構建數字高程模型→等高線、高程點成果,點云分類后地面點如圖4所示。
3.5 點云數據成圖
將分類出的地面點進行建模(DEM),人工對模型進行干預。對模型中不合理的三角網,將未分離出的地面點進行手動分至地面點,直到三角格網合理化。高程突變的區域,調整軟件分類的參數或算法,重新進行小面積的自動分類。
在精分類后的地面點模型上,分離出等高線關鍵點,利用軟件自動生成等高線,可設置最小面積、光滑以及等高距等參數,生成項目所需比例尺的等高線。按照所需要的高程點間隔導出點云數據三維坐標,即為高程點數據文件。
最后將生成的等高線及高程點數據文件導入Cass軟件中進行編輯,即完成對山區地形圖高程要素的采集編輯工作。
3.6 點云數據精度對比
本次點云精度檢測采用項目區現場布設檢查點的方式。檢查點選取: 分別在平坦水泥路面、山地和丘陵等地形條件和裸地、稀疏植被、茂密植被下等處用全站儀或 RTK 測繪均勻布設一定數量檢查點,檢核DEM內插時的高程較差以及DOM的平面較差。共選取了49個檢查點進行精度檢查,東坐標最大誤差為0.120m,北坐標最大誤差為0.117m,高程最大誤差為0.118m。平面中誤差為0.099m,高程中誤差為0.074m。經檢核均滿足規范標準,其中部分檢查如表1所示。
4 結束語
通過機載雷達在項目中的應用,可以得出機載雷達測量系統在植被深厚及地形復雜地區可以發揮巨大作用,相對于傳統測量極大地提高了測量精度,縮短作業工期,減少了大量的外業工作量。機載雷達測量系統能夠全天候作業,不僅白天作業,夜間也能正常作業,生產效率更高,且無需野外采集像控點,只需采集少量野外檢測點。隨著機載雷達測量系統技術的不斷成熟,可以在基礎數據采集與管理、交通、林業、農業等領域得到廣泛應用[4]。
參考文獻:
[1]陳小雁,聞麗佳.機載激光雷達點云在高植被山區數據處理中的應用研究[J].工程建設與設計,2019(18):242-243.
[2]徐陽亮.基于LIDAR技術的點云數據獲取及精度分析——以洞庭湖攝區為例[J].資源信息與工程,2018,33(05):122-123+126.
[3]李偉.機載激光雷達輔助地形圖繪制的應用實踐[J].測繪通報,2019(S2):130-133.
[4]龐治國.基于無人機載激光雷達的庫區高精度DEM生成[J].電子測量技術,2018,41(09):80-83.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
家庭影院技術(2017年9期)2017-09-26 03:41:45