基于障礙物檢測功能的盲人輔助服裝設計
2020-12-15 12:37:34朱祥成劉亞俠竹瀟瀟
毛紡科技 2020年11期
朱祥成,劉亞俠,竹瀟瀟,胡 蘭
(北京服裝學院 服裝藝術與工程學院,北京 100029)
中國是世界上擁有盲人數量最多的國家,大約有1 400萬人,同時每年還會新增大約45萬的盲人[1],因此盲人的出行安全應該引起人們的廣泛關注。在很多地區,盲道破損、盲道設計不合理、盲道被占用的情況比較嚴重[2-3],導致盲人的出行十分不便。在我國,盲人出行時一般會選擇經濟實惠的盲杖作為出行的輔助裝備[4],但是盲杖的探測空間有限,如果盲人在行走時沒有及時發現盲道被占用等情況,就容易發生意外。
目前導盲輔具一般分為4大類:①導盲犬類。導盲犬是一種可以幫助盲人外出行動的服務犬,具有溫順、聰明、親和性好等特點。我國導盲犬訓練工作開始較晚[5],其存在培養周期長、培養費用高、人均分配導盲犬數量低等問題。②手持類導盲輔具。在我國使用范圍最廣的是普通盲杖,這種盲杖取材方便、經濟實惠,盲杖材質通常為竹子、樹枝、不銹鋼管等。但普通盲杖未經過專業的設計與制作,所以在安全性與功能性上無法得到保證。近年來出現了許多在傳統盲杖基礎上加上電子設備的智能手杖,方仁杰等[6]設計了一款具有GPS定位和超聲波測障功能的智能拐杖,通過控制能夠實現燈光閃爍與聲音報警。俞國華等[7]對盲杖添加了多種環境狀況勘測功能,可以實現對路面積水、下行臺階的檢測。③穿戴類導盲輔具。一般以頭盔、腰帶、鞋的形式出現,通過傳感器對周圍環境進行探測,并為穿戴者及時進行預警。美國大學機器人實驗室Shoval以避障系統為基礎,設計出一款腰帶式輔助裝備,其可以帶領使用者繞過障礙物,并告知使用者障礙物的大小、遠近等信息[8],但是其特殊的造型會引起旁人的過度關注,給使用者帶來心理上的不適。④移動類導盲輔具。一般以導盲機器人為主,其可以引導盲人前進,也能與盲人進行信息交流。張瑩[9]以嵌入式技術為基礎開發了一款導盲機器人,能指引盲人正常轉體、前行、后退,也能有效避開前方障礙物,識別出盲道、斑馬線和信號燈顏色等。導盲機器人功能豐富,可以為盲人提供精確的導航信息,但也存在體積碩大,不易使用等缺點。
目前已有的導盲輔具存在著探測空間局限、笨重不易攜帶、價格昂貴等缺點,所以經濟高效的盲人輔助工具成為了廣大盲人群眾迫切的需求。
1 設計思路
本文根據盲人出行特點及特殊需求,通過Arduino智能服裝平臺[10],利用導電縫紉線(由可導電的不銹鋼材料制作,具有質地柔軟、不生銹等特點)以及易拆卸連接設計,將可穿戴電子硬件與普通服裝巧妙結合,設計制作了一款不受運動干擾、價格低廉、可拆卸能水洗的盲人輔助服裝。
盲人在行動過程中使用盲杖對路況進行探測,盲杖在正常使用過程中存在局限性,僅能對盲人身體中下部分的路況進行簡單探測,對處于人體上半身的懸空物體無法進行探測,這樣會給盲人的出行帶來一定的危險。因此本文設計了一款上衣,可以有效的探測前方懸空障礙物,并能夠給盲人及時提供反饋信息,根據盲人和障礙物的距離遠近,服裝可以及時給出不同的聲音提示。盲人輔助智能服裝同時也會有一些其他有利于盲人出行的設計,包括夜間出行安全設計、服裝顏色識別設計、物品識別設計等[11]。盲人輔助服裝可以配合普通盲杖,為盲人的出行安全構建一個簡單、全方位的預警機制,這樣在一定程度上可以避免懸空物體對盲人造成傷害。
2 電子系統設計
通過資料對比研究,本文所設計的盲人輔助服裝將通過探測盲人與障礙物之間的距離,根據預設程序及時報警,從而實現盲人對障礙物的躲避。
Arduino控制器根據型號不同可以分為Arduino Uno、Arduino Nano、Arduino LilyPad等,在本文電子系統中采用的控制核心是LilyPad Simple Snap,屬于Arduino LilyPad系列的一種口袋式按扣型Arduino控制器,可以使用Arduino IDE軟件進行編程。Arduino LilyPad系列產品是專為可穿戴設備而設計的,具備微型、功能齊全、能耗低等特點。根據盲人輔助服裝的功能設定,在系統中使用的傳感器是防水超聲波測距傳感器,超聲波傳感器與紅外線傳感器相比較,具有較強的方向性,能夠精準地進行測量,而且超聲波傳感器能量消耗較慢,能夠識別透明物體,如玻璃等[12]。防水超聲波測距傳感器不同于傳統超聲波距離傳感器,其在探測部位采用防水全封閉設計,超聲波的收發集于一體,這樣的設計方便在戶外場景中使用,尤其是在雨天中使用,該傳感器在測量精度與美觀度上也有很大的提升。盲人輔助服裝中使用的執行器是LilyPad Buzzer,這是一款為LilyPad配套設計的蜂鳴器,其在使用上十分方便,只需要占用LilyPad單片機的2個串口,就可以根據程序的設置實現聲音的變化,這款蜂鳴器還具備聲音大、不刺耳的特點。
2.1 電路設計
盲人輔助智能服裝的基本工作原理是,在服裝上安裝的3個超聲波傳感器,可以主動發出超聲波并進行距離探測,服裝的控制核心會對3個超聲波傳感器傳回的信號分別進行距離判斷,當其中任意一個傳感器探測到的距離處于預設報警距離時,蜂鳴器就會發聲報警,蜂鳴器將會根據人與障礙物距離的遠近改變提示音,當距離遠時,聲音是高頻低音,當距離變近時,聲音就會變為低頻高音[13]。盲人輔助服裝電路系統工作結構見圖1。盲人輔助服裝電路硬件連接見圖2。
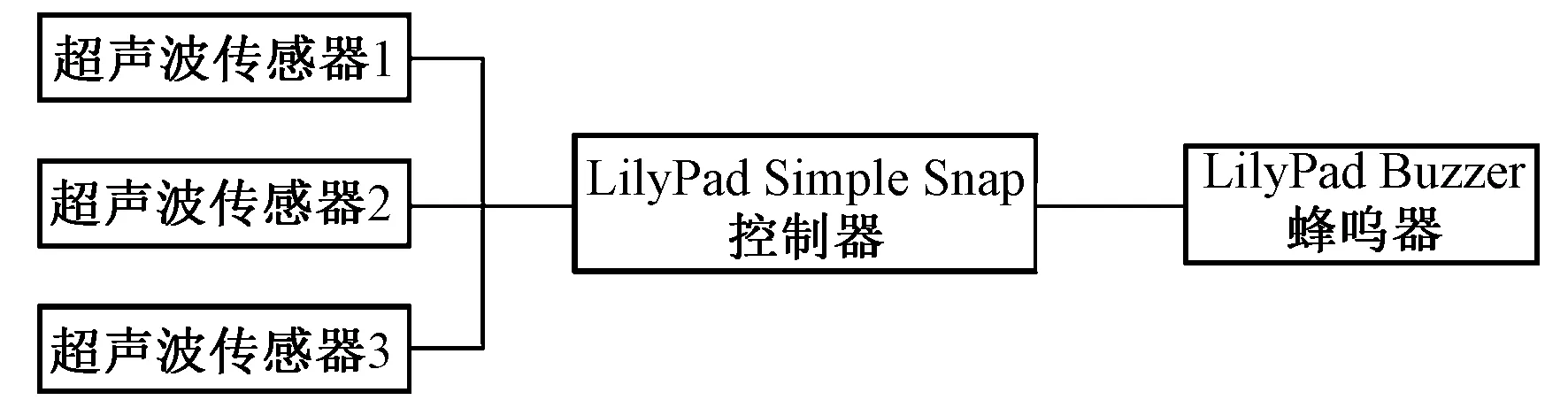
圖1 盲人輔助服裝電路系統工作結構
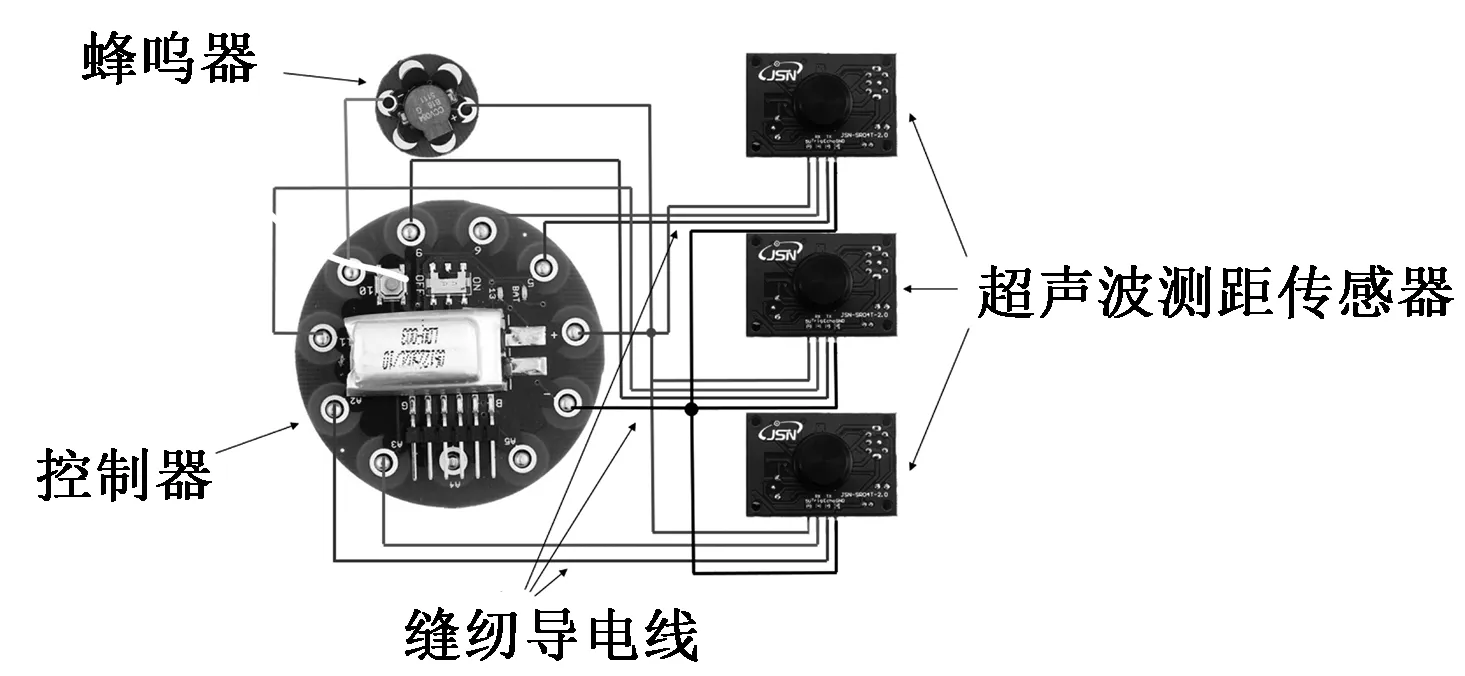
圖2 盲人輔助服裝電路硬件連接
2.2 電路連接設計
本文所設計的盲人輔助智能服裝,在硬件連接中沒有使用由絕緣皮包裹的傳統金屬導線,而采用了一種導電縫紉線,該導電縫紉線的柔軟性良好,同時還具備抗彎折能力強和拉伸強度高等特點,埋藏在服裝中不會有明顯的異物感,導電縫紉線見圖3。
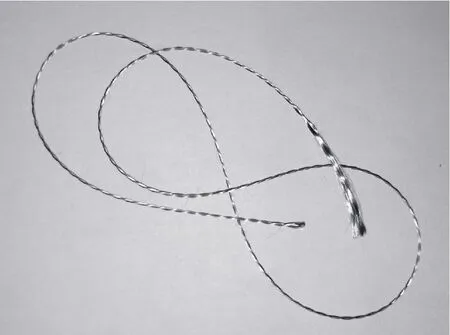
圖3 導電縫紉線
由于紡織導電縫紉線沒有絕緣層,所以在進行服裝布線的時候,需要使用普通縫紉線將各個導電線隔離,防止其相交造成電路短路。盲人輔助智能服裝的硬件與導線之間是可拆卸的,通過金屬按扣與接線端子將導線與硬件連接,該設計可以讓服裝內的電路系統,在具有良好信號穩定性的同時,也具備了可拆卸性。根據實際需求可拆卸電子硬件,從而實現該智能服裝的可水洗功能,金屬按扣連接方式見圖4,接線端子連接方式見圖5。

圖4 金屬按扣連接方式
圖5 接線端子連接方式
2.3 程序邏輯設計
本系統在Arduino IDE軟件中對單片機中所使用到的程序進行編寫,通過主控制芯片實現對各個硬件部分的控制。主程序邏輯設計如圖6示。

圖6 主程序邏輯圖
超聲波傳感器3點測距代碼如下所示:
int selectDistance(int distance1,int distance2,int distance3){
if(distance1==distance2 || distance1==distance3)
return distance1;
else if(distance2==distance3)
return min(distance1,distance2);
else
return min(min(distance1, distance2), distance3);
部分判斷程序代碼如下所示:
if(distance>80&distance<150){
for(int x=0;x<180;x++){
sinVal=(sin(x*(5/180)));
toneVal=(int(sinVal*100000));
tone(10,toneVal);
delay(2);
}
}else if(distance<80&distance>0){
for(int x=0;x<180;x++){
sinVal=(sin(x*(3.1412/180)));
toneVal=2000+(int(sinVal*1000));
tone(10,toneVal);
delay(2);
}
}else{
noTone(A);
}
3 盲人輔助服裝設計方案
3.1 款式設計
盲人群體有視覺障礙,不能像平常人那樣可以快速準確地識別一件服裝的正反及服裝的顏色。盲人失去了視覺,僅僅依靠聽覺與觸覺去感知世界,很容易造成安全感的缺失。本文根據盲人的部分特點設計了一款半開拉鏈翻領衛衣。當盲人穿上這款衛衣時,會產生一種包覆感,通過這種方式讓盲人的安全感得到一定的提升。盲人可以根據拉鏈或者領子的位置快速識別服裝的正反,同時還可以根據設置在服裝背面的顏色識別卡,來確定所穿服裝的顏色。顏色識別卡是用3個凸起半球來代表服裝顏色,凸起半球以時鐘刻度的形式均勻分布在圓盤上,不同顏色代表的凸起半球在顏色識別卡上分布的位置不同,盲人可以根據預先設定好的顏色位置,通過觸摸得知此件衣服的顏色。此款服裝還設計了多個口袋,盲人可以根據物品放置的位置,方便快捷地找到所需要的物品。根據人體肢體的動作特點,在服裝上肢常動部位與后背位置設計了反光帶,這在一定程度上也提高了盲人夜間出行的安全性。盲人輔助服裝正背款式圖如圖7所示。
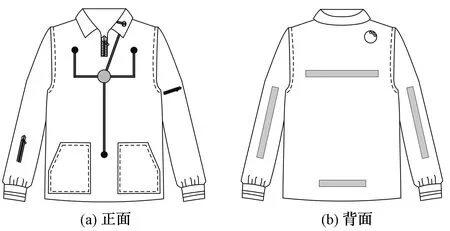
圖7 盲人輔助服裝正背款式圖
3.2 面料的選擇
盲人輔助服裝的面料采用了TPU貼膜的緯編雙面針織物,織物正反兩面均可以看見正面線圈,織物成分為100%滌綸,其具有防水、透氣、彈性適度等特點,而且還具有良好的耐磨性與柔韌性,一般用于戶外服裝。
3.3 傳感器及其他硬件定位
在對服裝的研究過程中,使用OptiTrack 全身動作捕捉系統,采集測試者模擬盲人使用普通盲杖行走時,貼在服裝表面標志點的實時坐標信息。通過對輸出圖像與輸出數據的研究分析,發現當模擬盲人使用盲杖時,手臂會在身體正前方做左右以及上下掃擺動作,如果在掃擺動作范圍內設置超聲波傳感器,會讓電子系統造成誤判提醒。因此綜合左右手臂的活動范圍,在上肢動作范圍死角所對應的服裝位置上設置一個超聲波傳感器。當測試者做轉體動作時,設置在測試者左右肩部標志點連線的旋轉角度,與身體的實際旋轉角度相一致,所以在身體正前方的左右肩部位置各設置一個超聲波傳感器。
據相關研究[14]顯示,盲人雖然失去了視覺能力,但在聽覺方面的能力得到了極大的提高,所以將蜂鳴器設置于左領的下方,可以讓盲人及時清晰的收到報警信息。通過調節縮小蜂鳴器聲波的傳播范圍,在一定程度上保護了盲人群體的隱私,減少了心理上的不適感。控制核心的擺放位置,以到各個硬件設備距離最短為原則,并且將其放在服裝的中心位置,使得整件盲人輔助服裝更加美觀。
4 服裝效果測試
4.1 測試方法
為保證實驗的安全性與數據結果的科學性,本文實驗選取6名身高均為172 cm的男性在校大學生,他們將完成2項實驗內容:蒙眼繞行多組障礙物、轉彎直行;躲避固定墻面。將6名測試者分為2組,每組3人,第1組測試者僅手持普通盲杖進行測試,第2組測試者手持普通盲杖并身穿盲人輔助智能服裝進行測試。
在實驗準備階段,每位測試者預先佩戴眼罩,手持盲杖進行20 min的自由活動,保證測試者熟悉黑視環境。
實驗一的內容是2組蒙眼測試者在陌生場地中進行繞行多組障礙物、轉彎直行能力測試。在實驗中,由工作人員帶領測試者到測試場地開始行走測試,并記錄通過測試內容的時間。實驗一的判定標準為:測試者通過所有障礙物且不撞上障礙物,最后到達指定位置就表示測試成功,否則表示測試失敗。在測試完成后,記錄2組蒙眼測試者在測試時的主觀感受,并對描述內容進行比較分析。
實驗二的內容是2組蒙眼測試者躲避固定墻面反應能力的測試。在實驗中,由工作人員帶領測試者到距離墻面5 m遠的固定點位處,測試者面向墻面開始行走測試,記錄測試者從開始出發到發現障礙物并轉身的時長,通過對比時長來比較測試者躲避固定墻面的反應能力。在實驗二中的時間記錄原則為,以測試者邁出第1步作為時間記錄的開始點,以測試者轉身作為時間記錄的終止點。
4.2 測試結果
實驗一測試結果如表1所示。
由表1可知,在第1組僅使用普通盲杖進行蒙眼測試的3位測試者中,僅有1位測試者通過了測試且耗時較長,其他2位測試者分別因為無法走出測試區域或多次撞上障礙物導致測試失敗。第2組使用普通盲杖并穿著盲人輔助智能服裝的3位測試者中,有2位測試者順利準確的通過了測試區域,另1位測試者在測試過程中輕微撞上了障礙物,但最后也通過了測試區域。結果表明穿著盲人輔助服裝后,對于測試者蒙眼行走有一定的幫助,可以提高測試者通過障礙區域的速度與準確性。
6位測試者對進行蒙眼行走測試時的感受描述如下。第1組測試者在蒙眼行走測試過程中,表示會有輕微的焦慮感與緊張感,缺乏安全感,感覺四肢冰冷,身體局部有汗液出現。第2組測試者在蒙眼行走測試過程中,表示僅有緊張感,無明顯不適感。因此穿著盲人輔助服裝在一定程度上可以提高人體的舒適感與安全感,減少心理上的緊張情緒。
實驗二的測試結果如表2所示。可知,僅使用普通盲杖進行蒙眼躲避固定墻面的3位測試者,發現障礙物并轉身所耗費的時間明顯多于穿著盲人輔助智能服裝的測試者。結果表明盲人輔助智能服裝在一定程度上提升了盲人躲避障礙物的反應速度。
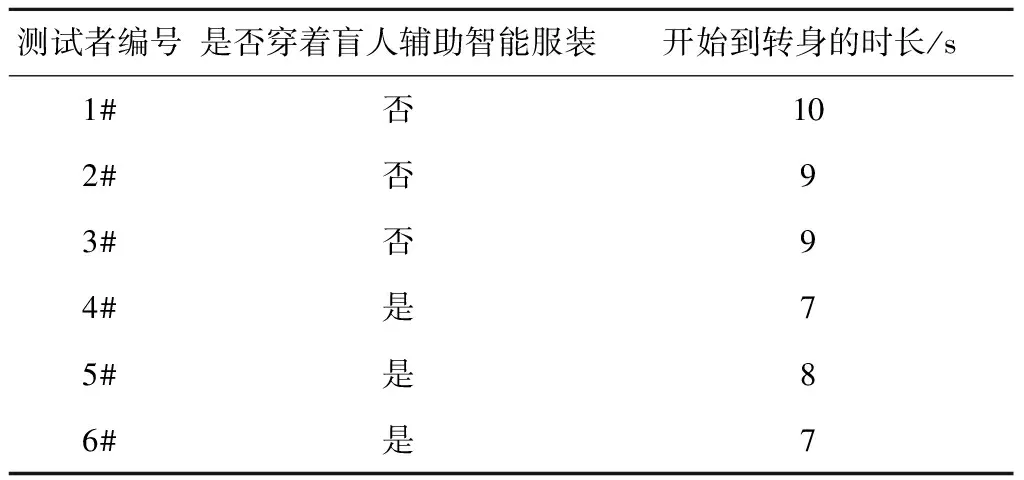
表2 實驗二測試結果
5 結束語
本文從服裝的功能設計、造型設計等方面,對盲人輔助智能服裝進行了研究,以超聲波傳感器的測距功能為基礎,提出了一種針對盲人出行安全的智能輔助服裝設計方法,以及2種盲人輔助智能服裝效果測試方法,得出這款盲人輔助智能服裝可以幫助盲人快速識別并躲避障礙物的結論。同時服裝的顏色識別設計、夜間出行安全設計,使得盲人輔助智能服裝在使用過程中更加人性化與合理化。
隨著社會大眾對盲人群體關注度不斷地增加以及科技水平的不斷提高,專為盲人群體設計的智能服裝在一定程度上將改變他們的生活方式。本文的盲人輔助智能服裝的設計思路以及服裝效果測試方法,可為盲人群體智能服裝提供參考。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17