矢量水聽器改進(jìn)高分辨Eigenspace算法
2020-12-15 02:29:54惠娟郭嘉賓宋明翰張曉亮李江喬唐開宇趙安邦1
哈爾濱工程大學(xué)學(xué)報 2020年10期
惠娟,郭嘉賓,宋明翰,張曉亮,李江喬,唐開宇,趙安邦1,2,3,,
(1.哈爾濱工程大學(xué) 水聲技術(shù)重點實驗室,黑龍江 哈爾濱 150001;2.西藏大學(xué) 信息科學(xué)技術(shù)學(xué)院,西藏 拉薩 850000;3.海洋信息獲取與安全工業(yè)和信息化部重點實驗室(哈爾濱工程大學(xué)),黑龍江 哈爾濱 150001;4. 哈爾濱工程大學(xué) 水聲工程學(xué)院,黑龍江 哈爾濱 150001;5.中國船舶工業(yè)系統(tǒng)工程研究院 水聲對抗技術(shù)實驗室,北京 100036)
高分辨方位譜估計技術(shù)提出以來便得到迅速發(fā)展,如今已廣泛應(yīng)用于通信、聲吶、雷達(dá)等領(lǐng)域。水聲陣列信號處理中波達(dá)方估計(direction of arrival,DOA)始終是研究熱點。傳統(tǒng)的常規(guī)波束形成(conventional beamforming,CBF)算法因瑞利限問題使得分辨率受陣列孔徑限制。高分辨方位譜估計算法的分辨率則不受瑞利限影響,方位估計性能更好。
高分辨方位譜估計算法中Schmidt[1]的多重信號分類 (multiple signal classification,MUSIC) 算法和Paulraj[2]提出的旋轉(zhuǎn)不變子空間(estimation of signal parameters via rotational invariance technique, ESPRIT)算法較為經(jīng)典。MUSIC算法通過分離信號子空間和噪聲子空間,利用子空間正交性估計目標(biāo)波達(dá)角度[3]。ESPRIT算法利用陣列子陣間的旋轉(zhuǎn)不變性估計目標(biāo)方位角[4]。Hoffman提出了利用相關(guān)矩陣的特征結(jié)構(gòu)進(jìn)行方位估計的特征子空間(Eigenspace)算法[5]。Eigenspace算法較經(jīng)典的MUSIC等算法具有更低的旁瓣和更高的方位估計精度,卻如諸多的高分辨方位譜估計算法一樣,在水聲等低信噪比環(huán)境下方位估計效果并不理想。
傳統(tǒng)的水聲信號處理大多基于聲壓水聽器陣列。Nehorai[6]建立了聲矢量水聽器陣列方位測量模型。聲矢量水聽器陣列可以同時獲得聲場中的聲壓和振速信息,相比于相等陣元數(shù)的聲壓陣具有更高的處理增益和抗干擾能力,更加有利于水聲低信噪比條件下的信號處理[7]。惠俊英等[8]提出聲壓振速聯(lián)合信息處理方法,提高了聲矢量陣抑制各項同性干擾噪聲的能力;孫大軍等[9]將反卷積波束形成技術(shù)應(yīng)用于聲矢量陣列。
常規(guī)的特征空間譜估計算法無法對相干源信號解相干,因此對相干源目標(biāo)進(jìn)行方位估計時性能較差[10]。一些學(xué)者進(jìn)行了相干源方位估計的研究,梁國龍等[11]利用聲矢量線陣進(jìn)行相干信號源的方位估計,提高了方位估計精度。姚直象等[12]對矢量陣空間平滑算法進(jìn)行研究,提高M(jìn)USIC算法對相干源的分辨能力。
水聲低信噪比環(huán)境下方位估計效果較差,聲矢量陣相對于相等陣元數(shù)的聲壓陣具有更高的處理增益。因此,本文將常規(guī)Eigenspace算法推廣到矢量水聽器陣列并結(jié)合聲壓振速信息聯(lián)合處理方法抑制各向同性噪聲并且提高方位估計能力。本文提出了基于聲壓振速聯(lián)合處理的Eigenspace-wiener算法,在較低信噪比下獲得良好方位估計效果;針對常規(guī)算法對相干源方位估計性能下降的問題,本文進(jìn)一步研究了空間平滑Eigenspace算法,結(jié)合維納后置濾波Eigenspace技術(shù),使算法的性能進(jìn)一步提高。
1 Eigenspace算法失量陳列理論分析
1.1 聲矢量陣接收信號模型
如圖1所示,以二維聲矢量水聽器陣為例,假設(shè)存在具有M個矢量水聽器的聲矢量陣列,第m個矢量水聽器的空間位置矢量為km,m=1,2,…,M,K個空間信號入射到該矢量陣列上,第k個空間信號的二維空間到達(dá)角為θi,定義第m個陣元聲壓通道和振速通道輸出為:
(1)
式中:pm(t)、vxm(t)、vym(t)分別是第m個陣元聲壓通道輸出分量、振速x通道的輸出分量、振速y通道的輸出分量;npm(t)、nvxm(t)、nvym(t)分別對應(yīng)第m個陣元聲壓通道、振速x通道、振速y通道的噪聲。a(θi)為均勻直線陣的導(dǎo)向矢量:
a(θi)=[a1(θi),a2(θi),…,aM(θi)]T=
(2)

圖1 M元聲矢量水聽器均勻線陣示意Fig.1 M element acoustic vector sensor uniform linear array
將各個陣元輸出分量排列組合,得到M元聲矢量水聽器均勻線陣聲壓通道P(t)、振速x通道Vx(t)、振速y通道Vy(t)的輸出:
(3)
根據(jù)文獻(xiàn)[7]所述,聲壓通道與振速通道噪聲互不相關(guān),可利用聲壓振速聯(lián)合處理的方法抑制噪聲,提高增益。將Vx和Vy通道組合,獲得組合通道Vc:
Vc(t)=Vx(t)sinφ+Vy(t)cosφ
(4)
式中:φ是引導(dǎo)方位角,調(diào)整φ的角度可改變Vc的指向性,實現(xiàn)波束空間的全方位覆蓋。將聲壓與振速通道進(jìn)一步組合后可獲得PVc、(P+Vc)Vc、(P+Vc)(P+Vc)等組合指向性。
由圖2可知,聲壓與振速通道的不同組合可獲得不同指向性以實現(xiàn)不同的工程需求,相對于其他2種組合方法,(P+Vc)Vc聯(lián)合處理主瓣較窄并且沒有左右舷模糊,本文采用(P+Vc)Vc的組合形式。
在(P+Vc)Vc聯(lián)合處理下該陣列對應(yīng)的協(xié)方差矩陣為:
R(P+Vc)Vc=E{[P(t)+Vc(t)]Vc(t)H}
(5)

圖2 矢量水聽器的組合指向性Fig.2 Vector hydrophone combined directivity
1.2 聲矢量陣列聲壓振速聯(lián)合處理Eigenspace算法空間譜估計
Eigenspace算法是將最小方差無失真響應(yīng)(minimum variance distortionless response, MVDR)算法的權(quán)向量投影到信號子空間得到該算法的權(quán)向量,通過投影變換使得權(quán)向量范數(shù)減小,提升了算法的收斂性和穩(wěn)健性;同時該算法充分利用了信號子空間,空間分辨性能更好。
MVDR算法的最優(yōu)權(quán)為:
(6)
將(P+Vc)Vc聯(lián)合處理構(gòu)成互協(xié)方差矩陣R(P+Vc)Vc,使用特征分解。將聲壓振速聯(lián)合處理構(gòu)成協(xié)方差矩陣特征分解為信號子空間和噪聲子空間:
(7)

ΣS=diag(α1,α2,…,αQ)
(8)
ΣN=diag(αQ+1,αQ+2,…,αM)
(9)
其中ΣS中α1,α2,…,αQ為R(P+Vc)Vc較大的特征值,對應(yīng)信號項,ΣN中αQ+1,αQ+2,…,αM為R(P+Vc)Vc較小的特征值,對應(yīng)噪聲項。
(10)

由此得到 Eigenspace 算法的最優(yōu)權(quán)為:
(11)
Eigenspace 算法使用了陣列輸出協(xié)方差矩陣中信號子空間分量,保證期望方向和干擾方向的輸出能量基本不變,并使得陣列噪聲輸出功率減小,提高了輸出信噪比,改善譜估計輸出旁瓣。
1.3 維納后置濾波Eigenspace算法
在最小均方誤差準(zhǔn)則條件下維納波束形成器權(quán)矢量利用約束波束輸入信號和期望信號得到,約束條件可表示為[13]:
(12)
式中w代表任意無失真波束形成器的權(quán)矢量,對式(10)進(jìn)行求解,可得到維納后置濾波系數(shù)為:
(13)
結(jié)合式(12)、(13),最終得到維納濾波的Eigenspace算法的權(quán)矢量:
wEigenspace-Wiener=HWienerwEigenspace=
(14)

1.4 空間平滑處理的Eigenspace算法
復(fù)雜的傳播環(huán)境會使水聲陣列接收到不同方向的相干信號,導(dǎo)致相應(yīng)信源下的協(xié)方差矩陣出現(xiàn)“秩虧”現(xiàn)象。空間平滑技術(shù)的基本思想是:將均勻線陣分成若干個相重疊的子陣,若各子陣列的陣列流形相同,則子陣對應(yīng)的協(xié)方差矩陣相加取平均可取代原陣列的協(xié)方差矩陣。通過這種降維處理的方法在譜估計之前進(jìn)行預(yù)處理,將協(xié)方差矩陣的秩恢復(fù)到與信源數(shù)相同,在犧牲部分陣列有效孔徑條件下實現(xiàn)信號源去相干,提高相干源分辨能力[14-15]。
針對基于空間平滑的Eigenspace算法,將M元均勻線陣?yán)没瑒臃绞椒殖蒒個子陣,每個子陣由J個陣元構(gòu)成,則有:
M=N+J-1
(15)
定義第n個子陣(P+Vc)Vc聯(lián)合處理構(gòu)成互協(xié)方差矩陣為Rn,將子陣結(jié)果加權(quán)得到:
(16)
對該矩陣特征分解為噪聲子空間和信號子空間有:
(17)
按上述常規(guī)Eigenspace算法推導(dǎo)有:
(18)
(19)
2 仿真與性能分析
2.1 Eigenspace算法仿真性能分析
仿真實例1:仿真陣列為16元矢量均勻線陣,陣元間距為半波長,采樣頻率為10 kHz,快拍數(shù)為40M(M為陣元個數(shù)),接收機(jī)帶寬為400~1 200 Hz,海水聲速取1 500 m/s,假設(shè)目標(biāo)是遠(yuǎn)場單頻信源,頻率分別為600 Hz和800 Hz,以陣的法線方向為0°,入射角度分別為30°和40°,所加噪聲為帶限白噪聲,采用聲矢量陣(P+Vc)Vc聯(lián)合處理的方法,得到不同信噪比下Eigenspace算法方位譜圖,如圖3所示。


圖3 不同信噪比下對2個獨立目標(biāo)方位估計譜Fig.3 Estimating the spectra of two independent target azimuths under different signal-to-noise ratios
對比圖3中的3種算法可知,相比于CBF算法,MUSIC算法和Eigenspace算法對雙目標(biāo)均具有較好的分辨能力,分辨率高。在較低信噪比下,Eigenspace算法相對于其他2種算法可較好抑制噪聲,并且具有旁瓣較低的優(yōu)勢。
仿真實例2:假設(shè)目標(biāo)為頻率600 Hz的遠(yuǎn)場單頻信源,入射角度為30°,其他條件同仿真實例1。信噪比變化范圍從-25~5 dB,蒙特卡羅仿真實驗次數(shù)為200次,得到Eigenspace算法的均方根誤差和DOA估計成功概率(閾值±1°),如圖4和圖5所示。
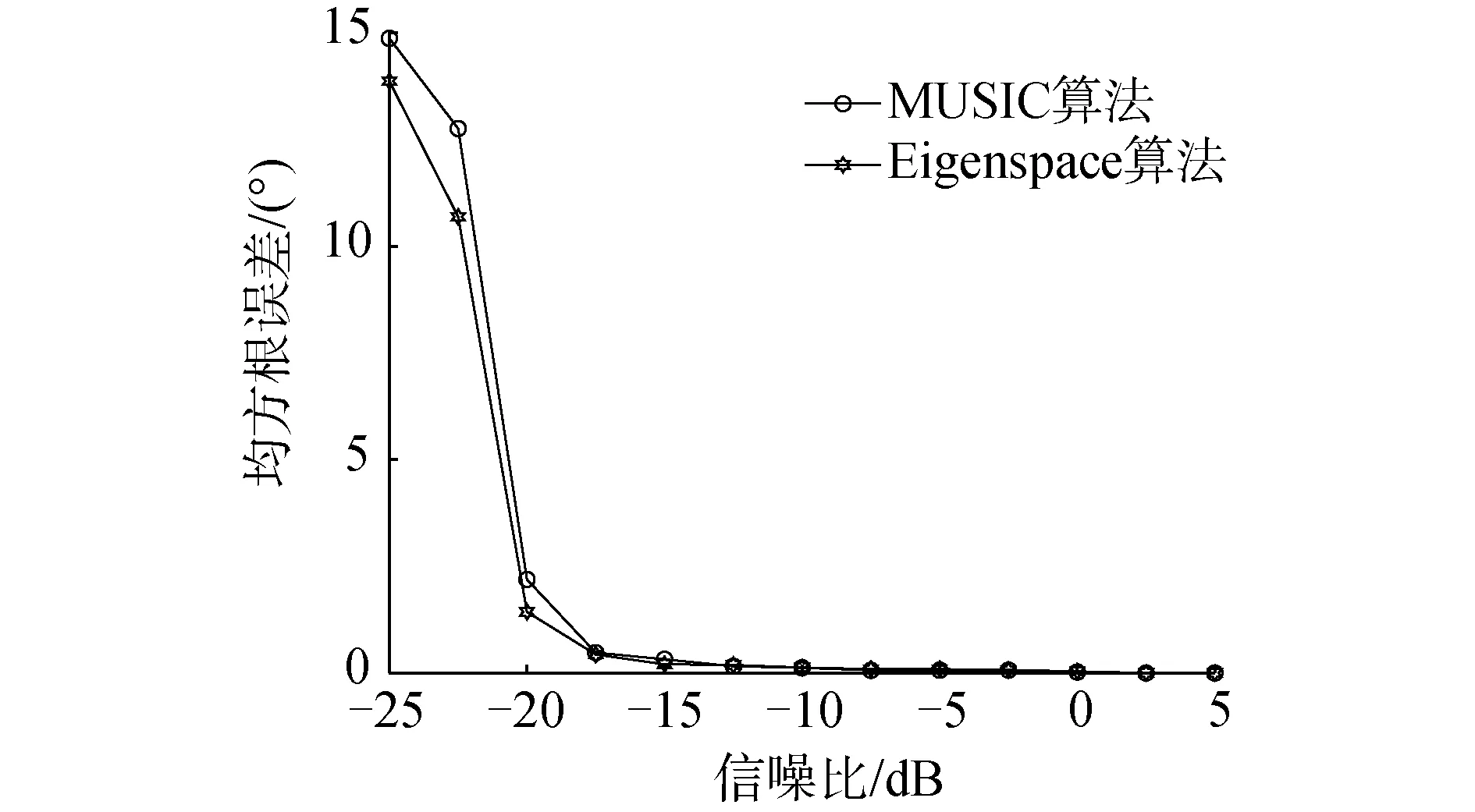
圖4 測向均方根誤差Fig.4 RMSE of azimuth estimation
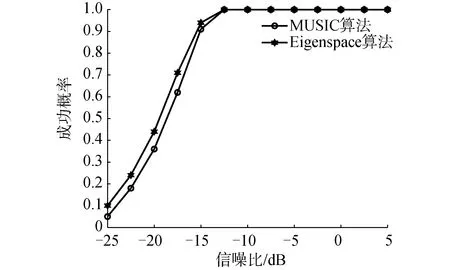
圖5 測向成功概率Fig.5 Direction finding success probability
由圖4和圖5可知,高信噪比下MUSIC算法和Eigenspace算法均具有良好性能,信噪比低于-18 dB時Eigenspace算法估計精度和成功概率均優(yōu)于MUSIC算法。仿真結(jié)果表明Eigenspace算法較MUSIC算法更適合水聲等低信噪比環(huán)境。信噪比大于-18 dB時陣列采用2種算法均方根誤差小于1°,為滿足后續(xù)仿真準(zhǔn)確測向的要求,后文中方位估計信噪比均在-18 dB以上。
2.2 Eigenspace-Wiener算法仿真分析
仿真實例3:假設(shè)信號為頻率600 Hz的遠(yuǎn)場單頻信源,入射角度40°,其他條件同仿真實例1,采用聲矢量陣(P+Vc)Vc聯(lián)合處理的方法,得到不同信噪比下Eigenspace-Wiener算法方位譜圖,如圖6所示;改變信噪比變化范圍,蒙特卡羅仿真實驗次數(shù)為200次,得到Eigenspace-Wiener算法的均方根誤差隨信噪比變化曲線,如圖7所示。

圖6 Eigenspace 算法與Eigenspace-Wiener算法方位估計對比Fig.6 Eigenspace algorithm and Eigenspace-Wiener algorithm position estimation comparison
由圖6可知,對比2種算法,Eigenspace-Wiener算法能較大程度抑制旁瓣,降低旁瓣干擾;由圖7可知,2種算法的方位譜和均方誤差根曲線,2種算法均方根誤差幾乎一致,估計精度相近。Eigenspace-Wiener算法在抑制旁瓣,降低旁瓣干擾,提高對目標(biāo)信號方位的分辨能力的同時,沒有降低方位估計精度,性能更優(yōu)。
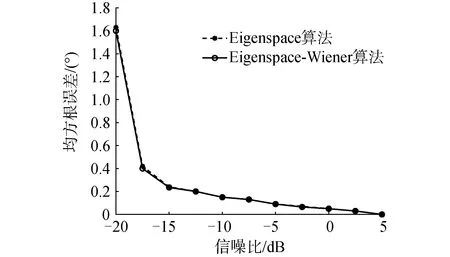
圖7 Eigenspace-Wiener算法均方根誤差隨信噪比變化曲線Fig.7 RMSE of Eigenspace-Wiener algorithm
2.3 空間平滑Eigenspace-Wiener算法仿真分析
仿真實例4:假設(shè)目標(biāo)為頻率600 Hz的遠(yuǎn)場單頻信源,入射角度分別為30°和40°(仿真目標(biāo)角度間隔小于瑞利限),其余條件同仿真實例3,采用聲矢量陣(P+Vc)Vc聯(lián)合處理的方法,得到不同信噪比下空間平滑Eigenspace-Wiener算法方位譜圖,如圖8所示。


圖8 相干源方位估計算法性能對比Fig.8 Performance comparison of coherent source position estimation algorithms
通過對圖8中不同算法的方位譜進(jìn)行對比,可知空間平滑技術(shù)可有效解決常規(guī)算法相干源方位估計性能下降的問題。結(jié)合維納后置濾波技術(shù),使得方位譜旁瓣進(jìn)一步降低,算法性能進(jìn)一步提高。
3 結(jié)論
1)本文對Eigenspace算法進(jìn)行理論分析并改進(jìn),提出基于聲矢量陣聲壓振速聯(lián)合處理的Eigenspace-Wiener算法和空間平滑的Eigenspace-Wiener算法。相對于聲壓陣對聲壓信息單獨處理,聲矢量陣(P+Vc)Vc聲壓振速聯(lián)合處理可獲得更高陣列增益并抑制左右舷模糊現(xiàn)象。
2)針對常規(guī)Eigenspace算法在低信噪比下部分旁瓣過高的問題,本文提出的Eigenspace-Wiener算法可以有效的降低旁瓣干擾。
3)針對常規(guī)Eigenspace算法無法分辨相干源問題,本文采用空間平滑處理,得到空間平滑Eigenspace-Wiener算法,可以有效地對相干源目標(biāo)進(jìn)行區(qū)分,同時結(jié)合后置維納濾波技術(shù),進(jìn)一步提高算法性能。計算機(jī)仿真結(jié)果與理論分析相一致,驗證了算法的正確性。
本文針對Eigenspace算法提出的改進(jìn)均具有一定理論意義的工程應(yīng)用價值。
