采用垂直短陣的水下小目標三維層析成像方法
2020-12-15 02:30:44曾賽杜選民范威張德澤
哈爾濱工程大學學報 2020年10期
曾賽,杜選民,范威,張德澤
(1. 上海船舶電子設備研究所,上海 201108;2. 水聲對抗技術重點實驗室,上海 201108)
層析成像是一項用于推演物體斷層剖面的方法[1],其通過獲得目標各個角度的散射信息完成對目標外形的反演計算,從而獲得目標的截面成像信息,得益于在醫學計算機化斷層顯像 (computerized tomography,CT)領域的成功應用[2],層析成像方法已經滲透到工程科學中的多個領域,如地震層析[3]、計算機斷層成像[4]、海洋參數反演層析[5]和合成孔徑雷達層析[6-11]等。層析成像方法本質上屬于譜分析法[1],其圓形測量幾何能夠形成圓合成孔徑,從而獲取目標的多角度觀測信息,同時拓展了波數域的有效帶寬,使得成像理論分辨率可達1/4波長,且層析成像技術能夠獲得目標的三維信息,可以有效的減小甚至消除目標疊掩、透視縮短和陰影等現象[12]。水下目標三維圖像對于目標探測識別具有重要意義,現有條帶合成孔徑聲吶只能夠獲得目標的二維斜距圖像[13-15],干涉合成孔徑聲吶只能形成斜距面2.5維圖像[16-17]。層析成像技術能夠獲得目標精確二維圖像,且具備三維圖像能力,Friedman等[18]通過圓合成孔徑聲吶層析試驗得到了目標的精確二維外形輪廓圖像。Ferguson等[19-20]理論分析和比較了不同層析重建方法的特點,并通過仿真和試驗驗證了層析成像技術在聲吶成像中應用的可行性。范威等[21]對單圈圓合成孔徑聲吶進行了層析成像仿真和試驗,得到了Benchmark目標模型的精確二維外形輪廓。單圈層析數據具有圓柱對稱性,波數支撐域在高度向具有一定帶寬,因此具有三維成像能力[22]。然而單圈層析數據信號波數譜支撐域是中空的,因此,單圈層析三維成像存在高度向高旁瓣效應。為了增加三維層析圖像高度向的分辨率和抑制旁瓣,可以沿著高度向進行多圈層析測量[20]。Marston等[23]通過無人水下航行器(unmanned underwater vehicle,UUV)在9個不同高度對目標形成多圈測量,形成垂直方向的稀疏孔徑,通過對多圈回波數據相干處理得到了多個水下目標的三維圖像。
通過水下航行器繞觀測目標進行多圈層析測量,會導致測繪時間較長,而且由于運動載體受到環境的影響,多圈測量時會形成運動平臺累積誤差,這會對對聲吶層析成像時的運動補償形成巨大挑戰。本文提出利用垂直短陣的水下目標三維層析方法,通過垂直短陣在一定高度繞著目標做圓周運動,一次性獲得多個高度向的回波測量信息,有效提升了測繪效率。對采用垂直短陣進行水下目標三維層析成像方法的成像能力進行了分析,并進行了典型參數下仿真試驗和水池試驗。
1 基于垂直短陣的水下小目標三維層析成像模型
1.1 基本信號模型
圖1為簡化的聲吶層析成像工作原理圖,圖1中的O為待測場景中的被觀測目標,S為收發合置圓合成孔徑聲吶,H為聲吶離待測目標平面的高度,Rs為聲吶運動半徑,R0為聲吶到被測目標之間的斜距,θ為聲吶波束俯仰角。
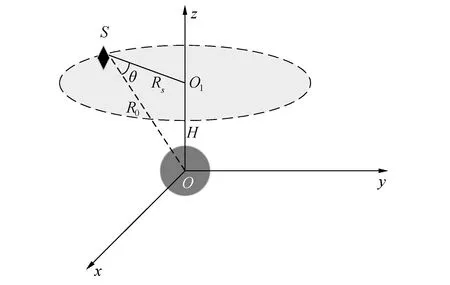
圖1 層析成像系統模型Fig.1 Tomography system model
為了增加觀測效率,利用垂直短陣作為接收陣,通過垂直陣一次圓軌跡觀測,獲得觀測場景不同高度向的回波。采取單發模式,發射陣位于垂直接收陣中心。為簡化回波模型,采用“等效相位中心”理論,取發射陣和接收陣的中點為等效相位中心,聲波被認為是從等效相位中心發射,并由等效相位中心接收。對觀測場景中的點(x0,y0,z0),設等效的陣元相位中心坐標為(xm,ym,zm),m為垂直陣實際的接收陣元序號,m=1,2,…,N,N為接收陣元個數,陣元間距為d,發射陣元位置記為(xtr,ytr,ztr),第n個接收陣元的位置記為(xr,n,yr,n,zr,n),則等效相位中心的坐標為:
(1)
等效相位中心與觀測場景中的點之間的距離Rm以及時延τm可以表示為:
(2)
式中c為介質中的聲速。
發射陣元發射線性調頻信號,原始回波經過解調得到第m個接收陣元的基帶時域信號sbase,m(t):
πKr(t-τm)2]}+N(t)
(3)
式中:rect(·)表示矩形波;f0為發射信號中心頻率;Tr為發射信號脈沖寬度;Kr為調頻率;N(t)為信號傳播過程的干擾和噪聲;σ為目標反射系數。對圓軌跡各個觀察角度的陣元回波信號經過同樣處理,即得到第m陣元接收陣信號sbase,m(α,t),其中,α表示圓周運動的角度,α∈[0,2π]。
1.2 方位-距離向層析成像
方位-距離向層析成像觀測幾何如圖2所示。記聲吶聲波的傳播方向與x軸夾角為θj。投影線記為AB:xcosθj+ysinθj=si,si為參考點O到AB投影線的垂直距離。在ti時刻,AB投影線上的信號為目標函數f(x,y)沿投影方向的積分為:
(4)
對獲得的投影數據g(s,θ)進行傅里葉變換F1(s→ξ)將信號變換到波數域,通過波數域插值將極坐標波數數據變為笛卡爾系下波數域數據,通過傅里葉逆變換即得到重建一維圖像。目標的外形輪廓能夠通過二維逆傅里葉變換得到[18]:
(5)
式中:如果G(ξ,θ)對于所有的(ξ,θ)是已知的,則在波數域中。F(ξx,ξy)在波數平面中(ξx,ξy)是已知的,則目標的外形重建為:
(6)
1.3 高度向逐像素點聚焦MVDR波束形成
垂直短陣測量幾何如圖3所示,在roz笛卡爾坐標系下,將成像場景離散為各像素點。垂直短陣發射陣元在陣中心,記發射陣元到觀測場景中心的距離記為Ra,對于場景中某像素點(ri,zj),接收陣元n到該像素點距離為:
(7)
對式(7)進行泰勒展開,像素點距離為:
(8)
接收陣元n到(0,zj)距離為:
(9)
對式(9)進行泰勒展開,距離為:
(10)

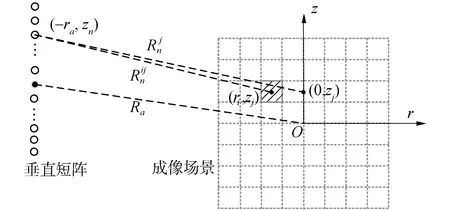
圖3 垂直短陣測量幾何示意Fig.3 Geometric diagram of vertical short array measurement

(11)
(12)
(13)
式中:N為垂直短陣陣元數;L為子陣長度;K為時間平均長度;xl表示l子陣時延測量值。
式(13)為利用子陣平均和時間平均估計得到的空間協方差矩陣,其具有更好的魯棒性[24]。
1.4 三維層析波束形成
傳統的水下三維聲成像技術包括波束形成方法、聲透鏡法和聲全息方法[18],波束形成方法是應用最為廣泛的三維成像方法。本文提出一種垂直短陣三維層析方法,該方法利用垂直短陣繞目標一次圓周運動替代單發單收合成孔徑聲吶繞目標在不同高度做多圈層析,實現對觀測場景聲信號快速獲取。利用垂直短陣形成的垂直孔徑進行高分辨波束形成成像處理,提升高度向分辨率,然后對波束形成得到的高度向數據進行水平-距離向層析成像處理,通過對所有層析成像結果相干處理得到最終的三維圖像結果。圖4為垂直短陣三維層析成像方法的基本流程,其中,P為角度采樣點數,M為距離向采樣點數。
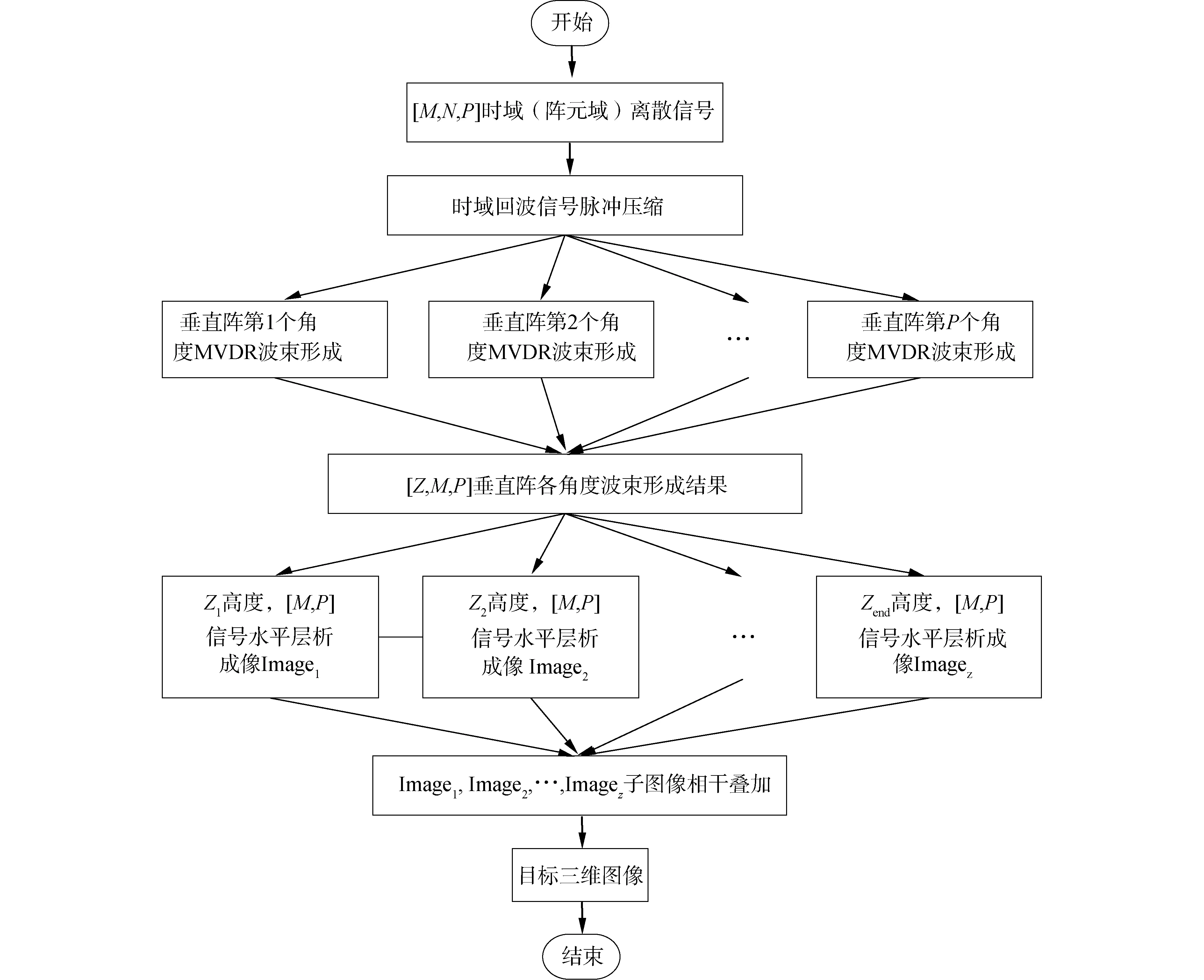
圖4 三維層析算法流程Fig.4 3D tomography algorithm
2 垂直短陣三維成像能力分析
點擴散函數能夠表征聲吶系統的成像能力,點擴散函數波數譜支撐域決定了聲吶圖像的分辨率。從分辨率角度來看,在水平方位-距離向,單圈層析與垂直短陣層析具有相同的合成孔徑大小,因此水平方位-距離分辨率一致;在高度向,由于垂直短陣孔徑大于單圈層析孔徑。因此,垂直短陣的高度向分辨率優于單圈層析的垂直分辨率。從抑制旁瓣的角度來看,由于方位向采樣率不滿足香農采樣定理,使得單圈層析成像存在水平向高旁瓣缺陷[25],垂直短陣形成的多圈層析成像能夠抑制水平向旁瓣。
2.1 單圈點擴散函數分析
單圈層析成像的觀測幾何如圖5所示。設聲吶陣元所在空間為Ω,單圈時發射接收陣元等效相位中心為(xa,ya,za),在圖4所示的坐標系下,聲吶在α角度時極坐標為(r0cosα,r0sinα,0),設場景中待觀測目標為(x,y,z),則得到該散射點目標的Ewald球波數分量為:
(14)

(15)
通過對支撐域模糊度函數分析,可以得到單圈層析成像模型對于觀測場景中心(0,0,0)點擴散函數為[26-27]:
(16)
式中φ=arctan(r0/z)。非中心目標的點擴散函數沒有解析解,只能通過數值計算模擬。通過式(14)可知,單圈層析成像中心點擴散函數為0階貝塞爾函數形式。0階貝塞爾函數的峰值旁瓣比為-8 dB, 而sinc函數峰值旁瓣比約為-13 dB,可見單圈層析成像模型具有較高的旁瓣。
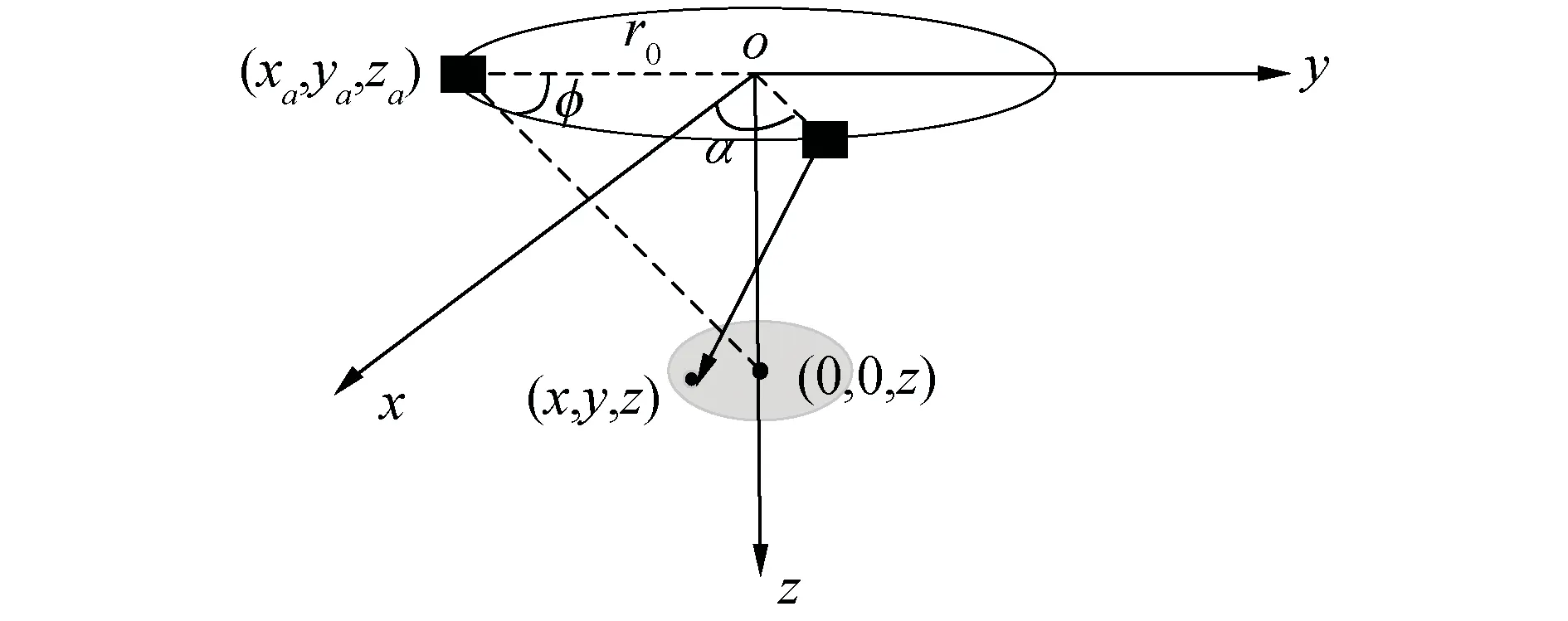
圖5 單圈層析成像觀測幾何Fig.5 Single circle tomography observation geometry
2.2 垂直短陣點擴散函數分析
垂直短陣層析成像觀測幾何如圖6所示。記不同單圈層析的等效相位中心為(xi,yi,zi),極坐標形式為(r0cosα,r0sinα,zi)。與2.1節類似,可得到觀測場景中(x,y,z)點目標的Ewald球波數分量為:
(17)
垂直短陣層析成像點擴散函數波數譜支撐域為:
ROS(x,y,z)=
(18)
垂直短陣的圖像可以通過單圈等效相位中心信號相干疊加重建。其成像場景中心點(0,0,0)的擴散函數可以表示為單圈點擴散函數的積分形式:
(19)
其中不同高度陣元對觀測場景中心的掠射角φi記為:
φi=arctan(r0/zi)
(20)
式(19)表明,垂直短陣層析成像模型在水平向的分辨率是對稱的,信號波長以及布陣形式影響最終的分辨率。
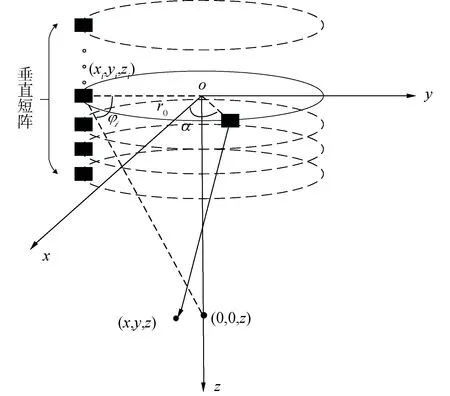
圖6 垂直陣層析模型Fig.6 Vertical array tomography model
2.3 點擴散函數仿真分析
為直觀反應單圈層析與垂直陣層析模型分辨率和旁瓣的差異,通過仿真單圈和垂直短陣層析模型對成像場景中心點目標的點擴散函數,利用后向投影(back projection, BP)成像算法對成像結果進行對比。仿真參數如表1所示,仿真得到的點擴散函數圖像切航跡向剖面圖如圖7所示,點擴散函數圖像切航跡向3 dB帶寬、峰值旁瓣比(peak side lobe ratio,PSLR)和積分旁瓣比(integral side lobe ratio, ISLR)結果如表2所示。由圖7和表2可以看出,單圈層析和垂直陣層析具有相當的分辨率,而垂直陣層析具有更低的峰值旁瓣比,即目標整體的旁瓣得到了抑制。
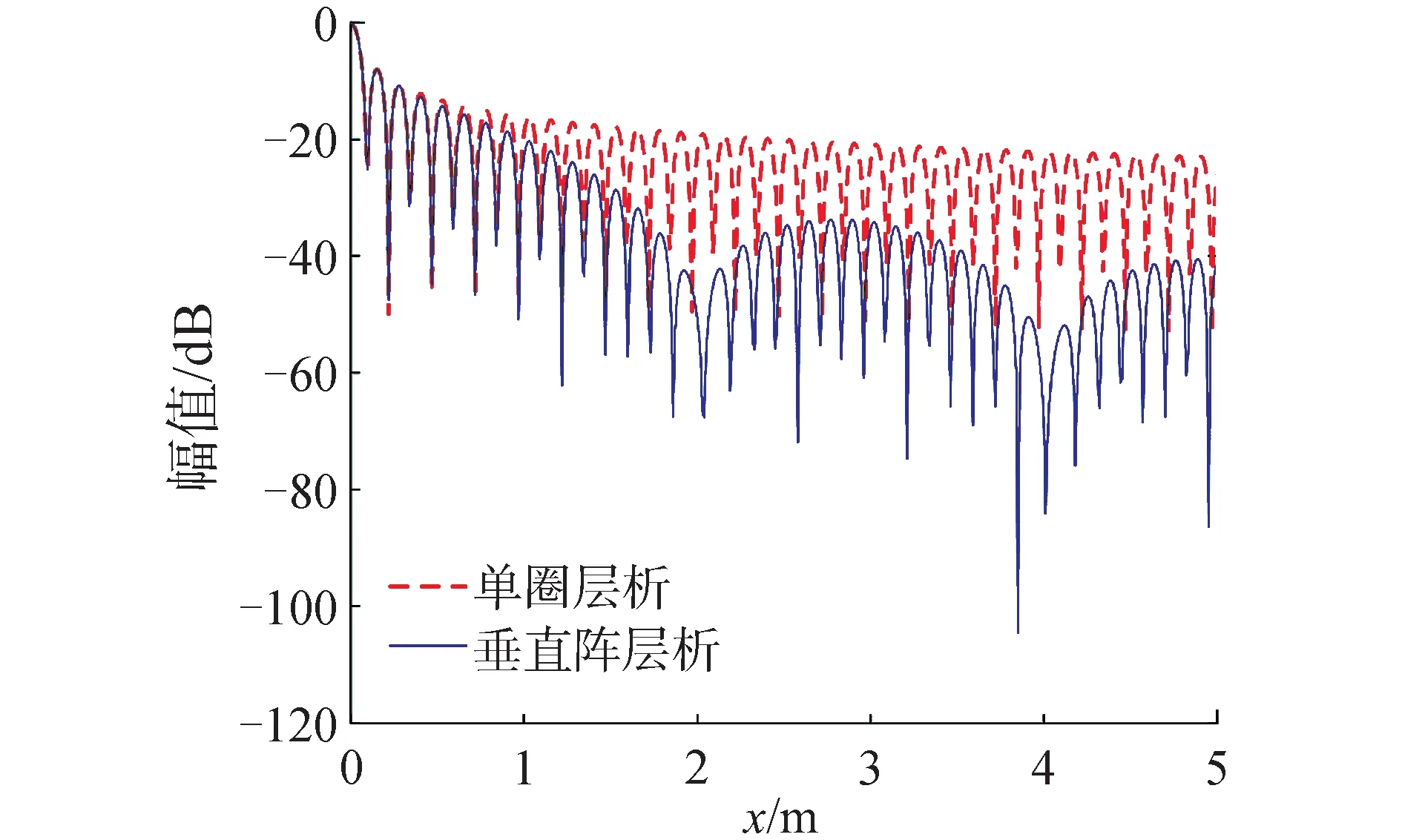
圖7 點擴散函數圖像切航跡向剖面Fig.7 Point spread function image cut path profile
3 仿真和水池試驗
3.1 仿真試驗
為驗證垂直短陣三維層析成像方法的有效性,進行體目標計算機仿真試驗,仿真參數設置為:聲速1 500 m/s,信號為線性調頻信號,中心頻率為100 kHz,帶寬為30 kHz,發射脈寬為10 ms,接收陣元數為32陣元間距為0.037 5 m,聲吶安裝平臺做圓周運動速度為0.175 m/s,運動半徑為10 m,聲吶平臺高度為10 m。仿真試驗的體目標如圖8所示,由68個點目標組成。

表1 仿真參數設置Table 1 Simulation parameter settings

表2 點擴散函數性能比較Table 2 Cross-track performance comparison
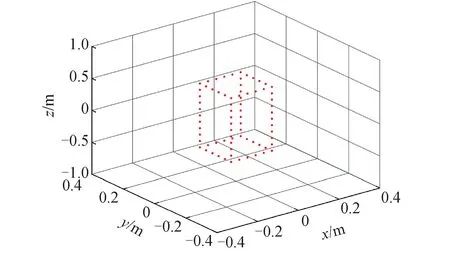
圖8 仿真體目標Fig.8 Simulation target
圖9為仿真試驗時垂直短陣的測量幾何示意圖,通過垂直短陣繞目標運動一次性獲得多圈層析數據。圖10為利用本方法得到的仿真體目標三維圖像,三維成像結果與圖8中的目標完全一致。
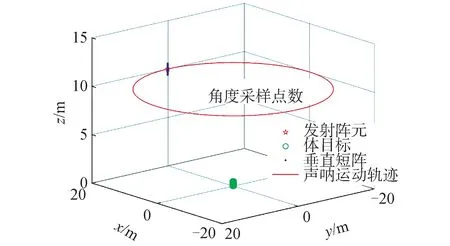
圖9 垂直短陣測量幾何示意Fig.9 Geometric diagram of vertical short array measurement
3.2 水池試驗與處理結果分析
通過水池試驗進一步驗證提出的垂直短陣三維層析成像算法的有效性。試驗用垂直短陣長1.2 m,其中接收陣由32個陣元組成,發射陣布置在接收陣的中間。試驗目標為利用高散射強度小球搭建的三維立體目標。小球直徑為8 cm,小球間距為15 cm,小球橫穿在直徑為0.5 cm的鐵桿上,鐵桿長為1 m,每個鐵桿上橫穿4個目標球。3個鐵桿相互垂直布置。試驗目標如圖11所示。
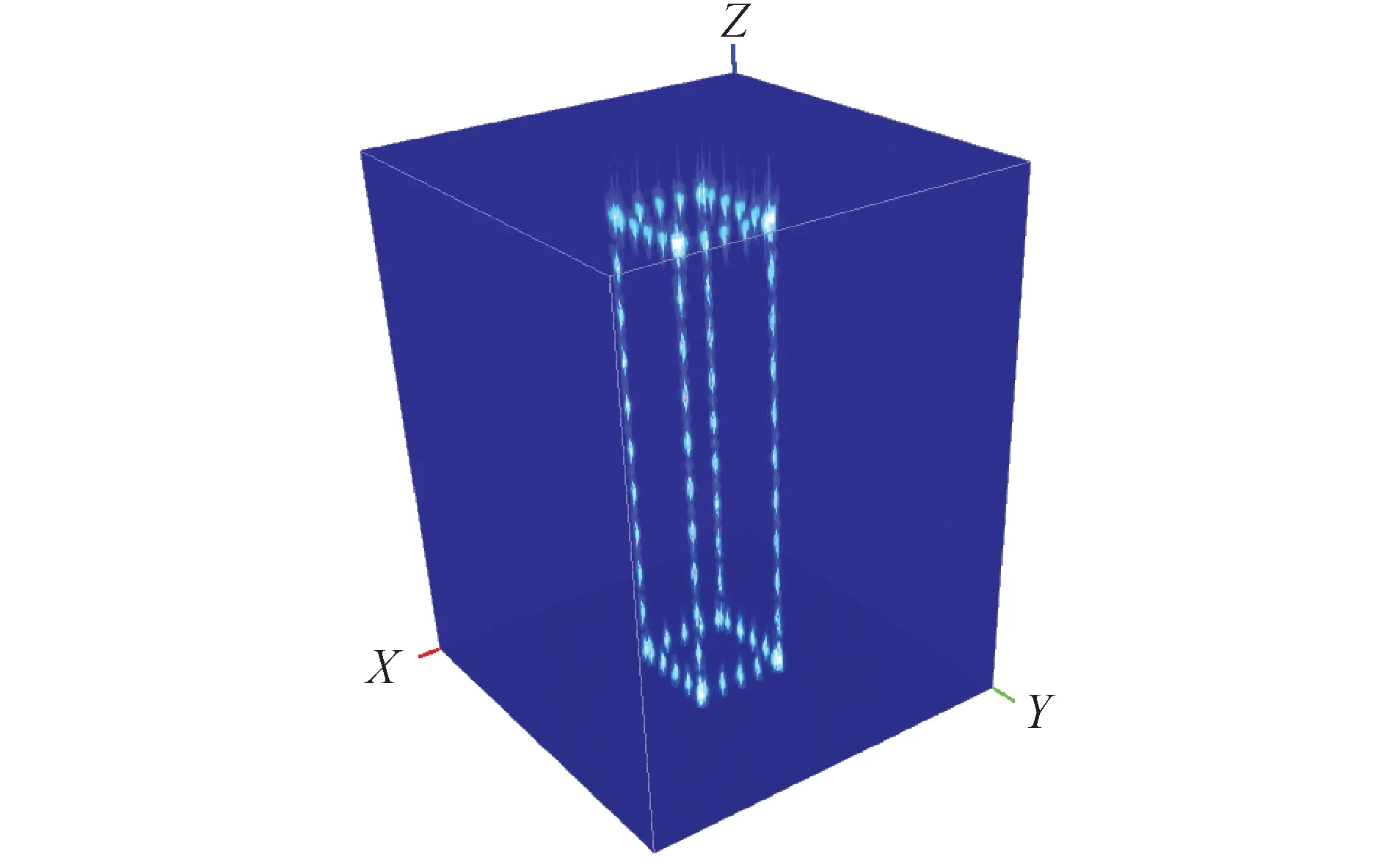
圖10 仿真目標三維層析成像結果Fig.10 Simulation target 3D tomography results

圖11 試驗用的三維目標Fig.11 Three-dimensional target for experiment
水池試驗目標與垂直短陣測試距離R為10 m,待測目標與聲吶濕端分別置于2個旋轉臺下端, 試驗測量態勢如圖12所示。發射陣離水面距離H2=3 m,試驗目標中心離水面距離H1=3.55,試驗目標通過吊放繩系在轉臺兩端。在測試過程中,目標勻速旋轉,速度為0.129°/s。在目標勻速旋轉過程中,聲吶系統不斷發射和接收目標回波信號,其中發射陣發射信號形式為CW脈沖,中心頻率為100 kHz,信號脈寬為20 μs。
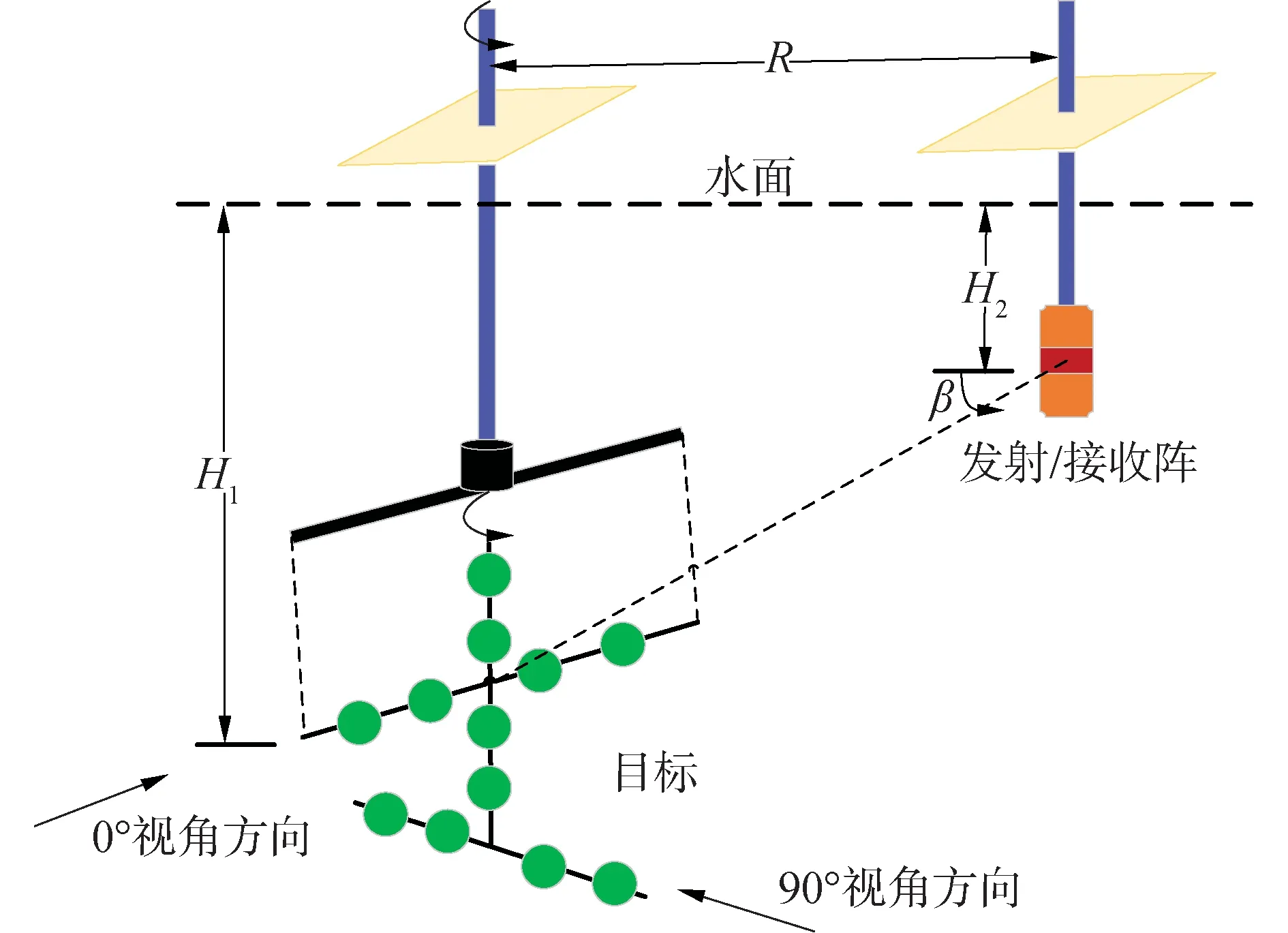
圖12 試驗測量幾何Fig.12 Test measurement geometry
圖13為試驗目標回波信號,從中可以看出,隨著目標的旋轉,目標回波信號呈現類似正弦曲線的結構。圖14為垂直短陣在30°視角方向逐像素點MVDR波束形成結果。圖14為試驗目標在不同視角下的三維圖像結果,從中可以看出,組成三維立體目標的12個小球均在三維圖像中得到顯示,且12個小球的空間分布與實際情況相符合,在0°視角下,目標三維圖像呈現倒“T”字形;在45°視角下,三維圖像完全反應目標空間分布;在90°視角下,目標圖像呈現“十”字形。圖15中第2層目標旁邊的亮點和上方的亮點為吊放繩。

圖13 目標回波結構Fig.13 Target echo structure
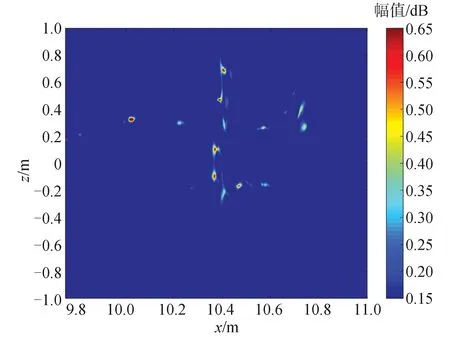
圖14 垂直短陣30°視角方向波束形成結果Fig.14 Schematic diagram of vertical short array 30-degree viewing angle direction beamforming
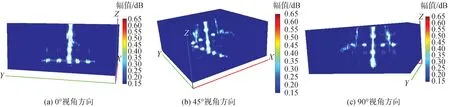
圖15 試驗目標三維成像結果Fig.15 Test target 3D imaging results
4 結論
1)采用水下無人航行器搭載合成孔徑聲吶在不同高度上繞目標進行多圈圓周測量會導致測繪時間變長,隨著時間的積累,無人航行器的運動誤差會累積,對成像時的運動補償帶來困難。
2)本文提出的采用垂直短陣的水下小目標三維層析成像方法提升了測繪效率。垂直短陣陣列高分辨處理提升三維圖像高度向分辨率,通過水平層析成像處理獲得不同高度二維圖像,對各高度向二維圖像進行相干融合處理獲得水下目標三維圖像。
3)仿真試驗提升了三維圖像的成像質量,水池試驗驗證了本文方法的有效性。本文提出的基于垂直短陣的水下小目標三維層析成像方法,能夠獲得水下小目標的三維圖像,對于水下小目標的探測和識別具有重要意義。
仿真試驗和水池試驗均是在理想運動軌跡下進行的,后續將優化現有三維成像算法,開展非理想運動軌跡的運動誤差補償研究,進一步提升三維圖像的垂直向成像精度。
