四川省水庫庫底淤泥分布探測技術研究與分析
2020-12-16 06:08:24肖翔羅思敏江尚輝趙川
農業與技術 2020年23期
關鍵詞:測量
肖翔羅思敏江尚輝趙川
(1.四川省水利科學研究院,四川 成都 610072;2.廣安市生林建筑有限公司,四川 廣安 638099)
1 研究背景
我國已建成的水庫大部分的建設年代在20世紀70年代中后期,建成距今已50a以上。隨著庫區周邊所在市縣經濟建設的進程,庫內綜合用水及其旅游開發、采砂等,使庫區周邊及其水下地形均起了較大變化。在20世紀80至90年代,有些水庫長年開展多種經營活動,水庫周邊餐館林立,水面養魚網箱密布。由于沒有配套的雨污分流設施,致使這些分布在庫周邊的餐飲業廢物水直接入庫,污染了庫內水體;網箱養魚投放飼料、藥劑時,會產生糞便溶出沉積、分泌物溶出沉積、餌料溶出沉積,在給水體造成污染的同時,這些溶出沉積落淤庫底,使水質逐年下降[1-3]。
由于入庫污染的長期積累,湖庫底部淤泥成分復雜,含有有機污染物、重金屬以及營養物質,不僅影響湖庫水質狀況,還會對湖庫周邊環境造成不良影響,嚴重破壞生態環境。除此之外,水庫淤積會產生一系列的問題:會導致庫容損失、水庫設計功能削弱,影響工程正常效益發揮;水庫淤積的維護成本負擔和危害不斷加重,加速了工程報廢;增加安全隱患,危及工程安全[4-6]。
2012年,水利部、國家發改委組織有關專家召開水庫清淤座談會,建議將水庫清淤作為水庫日常運行管理工作的一項重要內容。2015年12月,水利部大壩安全管理中心在調研的基礎上,研究編制了《全國水庫清淤專項規劃前期研究報告》,提出應遵循“輕重緩急”原則,呼吁將水庫清淤納入財政專項補助。四川省水利廳積極申報,將“四川省水庫淤積治理及水源保護試點”納入了“省委全面深化改革領導小組2016年改革工作臺賬”。2018年6月中共中央國務院在《中共中央國務院關于全面加強生態環境保護堅決打好污染防治攻堅戰的意見》中強調“著力打好碧水保衛戰”,要深入實施水污染防治行動計劃,扎實推進河長制、湖長制,堅持污染減排和生態擴容兩手發力,加快工業、農業、生活污染源和水生態系統整治,保障飲用水安全,消除城市黑臭水體,減少污染嚴重水體和不達標水體。
2 研究方法
2.1 水庫現狀及需求調研分析
充分調研四川省大中小型水庫的淤積現狀,收集并分析資料,選擇試驗區。收集試點水庫的基本資料、歷史資料,分析其污染源,并形成治理方案與對策。
2.1.1 網箱養魚污染源
四川省水庫自發展網箱養殖業至取締網箱養殖,歷經了多年的集約化規模養殖,養殖期間每年向水庫投放魚飼料,魚糞和飼料直接進入水庫水體。
魚糞飼料排放量計算公式:
T=∑ki
(1)
式中,K=a×0.75+a×0.05=0.8a,i=1,2,...,T;a為每年投放魚飼料總量;T為自發展網箱養殖至取締網箱養殖總年份。
2.1.2 庫區居民生產生活污染源
水庫周邊居民的生活垃圾、生活污水往水庫排放,嚴重污染水庫水源。
生活污水排放量計算公式:
Qs=Kq1V1/1000
(2)
式中,Qs為生活區污水排放量,t·d-1;q1為每人每天生活污水量定額;V1為生活區人數,人;K為污水排放系數,一般為0.6~0.9,北方取小值,南方取大值。
生活垃圾排放量計算公式,參照CJ/T 106-2016生活垃圾產生量計算及預測方案。
2.1.3 水庫漂浮物污染源
引水渠道經過沿途城市、鄉鎮帶來漂浮物,水庫消落區農作物秸稈、景區內農家樂、游客、庫區百姓和釣魚人員帶來的漂浮物等垃圾,給水庫水質帶來嚴重污染。
2.2 水庫淤泥探測技術路線
本次庫區測量建議采用GPS的RTK技術加超聲測深儀技術測量;在庫區測量基礎上,以不同高程控制基準面為基礎進行庫區相應面積S和庫容V的積分,從而得到當前的H-S-V曲線和相關庫區水下地形圖。可以采用單波束回聲測深技術,測得庫底地面高程,并將之與原庫區地下地形進行疊加和對比分析,從而得出庫底泥沙淤積分布狀況。或者采用RTK加雙波束或多波束回聲測深技術,通過寬、窄波束不同的穿透能力和回聲速度,在進行噪音消除和數據校正基礎上,判讀庫底泥沙的淤積狀況,從而確定庫區水下地形[7-11]。
在測線布設時,要符合國家相關水利工程測量規范,并與當地沿庫岸區布設的GPS控制站網相銜接,使測量結果不疏不密,科學合理。同時應該考慮水下地形的變化趨勢,若地形變化相對比較平坦,則測線間距可以適當放寬,否則,需要加密測線。這有利于使測點均勻分布于整個測區,同時在測區水下地形變化復雜的地區加密測點,使測點深度能更好地反映水下地形的變化趨勢。技術路線如圖1所示。
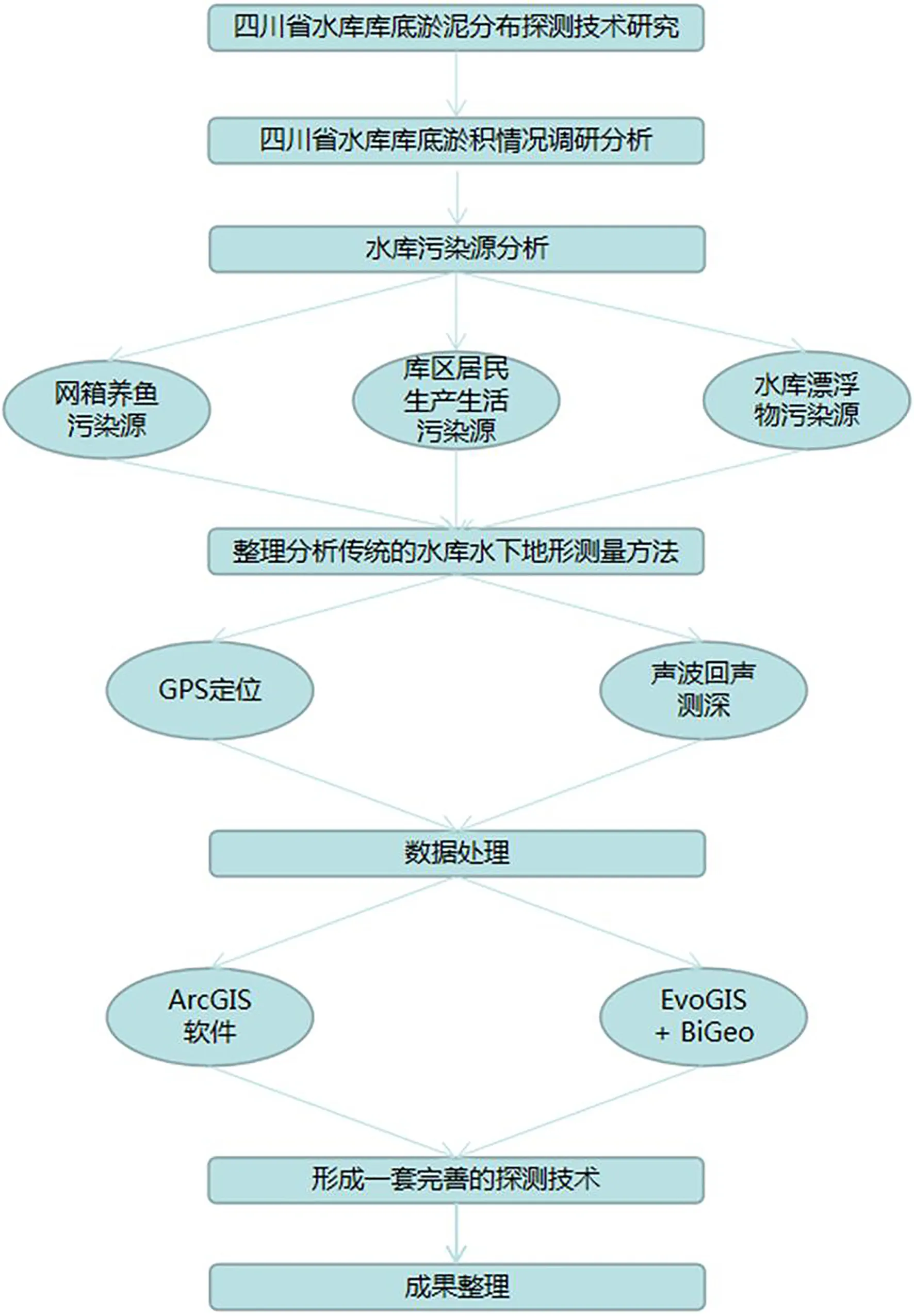
圖1 水庫庫底淤泥分布探測技術路線圖
3 研究過程及成果分析
3.1 庫底淤泥測量過程
本次擬定在四川省內江市河壩沖水庫、石花水庫開展庫底淤泥分布的精準測量工作。河壩沖水庫和石花水庫皆屬于小一型水庫,水庫面積均在0.2km2左右。根據前期初步測量成果,河壩沖水庫壩前測量水深在4m左右,壩中10m左右;石花水庫壩前測量水深6m左右,壩中9m左右,無水流影響,無水草干擾。綜合考慮現場的交通便利性,無人船下水的便捷性、現場的信號好壞、水庫的大小、水深等因素,結合可視范圍受限的問題,將每個水庫分為4~5次作業,測量過程如圖2、圖3所示。

圖2 無人船在水中自主航行并測量
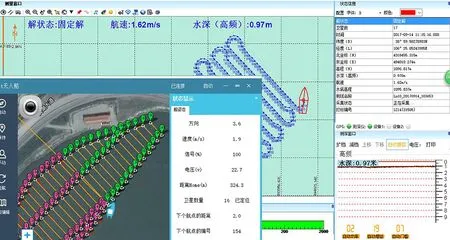
圖3 船控軟件與測深軟件界面
測量時,人員在岸上要注意觀察水面是否有障礙物,如果發現障礙物,即可將遙控器切換為手動模式,減緩船速,繞開障礙物。當船體離操作人員較遠時,可通過船體上的攝像頭進行實時監測,及時判斷前方水域情況。
無人船會按照航線跑完測區,然后在航線終點停下來,可以通過船控軟件,點擊返航,船體就會自動返回Home點;如果未點擊返航,船在5~10s接收不到任何指令后就會按照之前導入的Home點自動返航。返航之后即可找到合適的地點將船回收。航線規劃方式采用繪制多邊形后依據測線規劃要求自動規劃航線,優勢在于能精確地定位整個水庫測區范圍,數據更為完善,斷面間距更加精確。
3.2 庫底淤泥測量結果分析
在完成上述測量工作后,將測量完的數據按照成果要求,進行采樣。做中值濾波處理,將有些假的水深數據點過濾掉,進行采樣。本次測區按照5m的間距進行采樣,確保了數據的準確性,圖4為水庫水深點采樣界面。
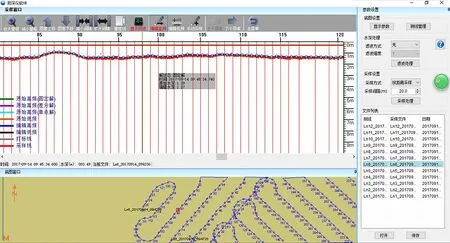
圖4 水深點采樣界面
對采樣完的數據進行改正,主要有轉換參數改正、延遲改正、水面高程改正、吃水改正以及聲速改正5個方面,該水域水面相對平靜,水下聲速變化不大,所以只需要進行簡單的水面高程改正以及吃水改正即可。最終得到的河壩沖水庫和石花水庫等深線成果圖如圖5和圖6所示。
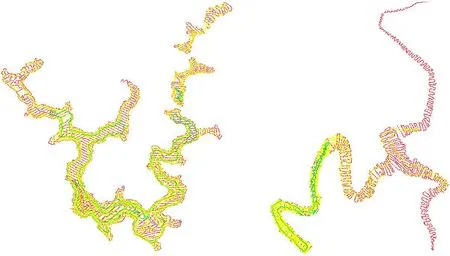
圖5 河壩沖水庫等深線圖 圖6 石花水庫等深線圖
4 結論
本文分析了我國當前水庫的淤泥堆積現狀,調查收集并分析資料,最后選擇了四川省內江市河壩沖水庫和石花水庫作為試驗區,開展庫底淤泥分布的精準測量工作作為典型示范。本次庫區測量采用GPS的RTK技術加超聲測深儀技術測量,在分析傳統水庫庫容及淤積量測量所存在問題的基礎上,依靠GPS定位和回聲測深技術,系統講述了測量方案和測量過程,最終得到了河壩沖水庫和石花水庫的等深線圖,以便于相關部門計算淤積量,從而為庫區安全運行、經濟運行提供科學依據,也為后期的清淤工作提供前期技術性支撐。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
