德國戰(zhàn)后第2 代重型魚雷技術發(fā)展研究
2020-12-19 06:16:32劉海光王華榮
艦船科學技術 2020年11期
關鍵詞:系統(tǒng)
李 偉,劉海光,王華榮
(1.海軍潛艇學院,山東 青島 266199;2.中國船舶集團公司 第七一四研究所,北京 100101)
0 引 言
作為二戰(zhàn)的戰(zhàn)敗國,戰(zhàn)后德國進攻型武器的發(fā)展受到極大限制[1]。直到1958 年,隨著冷戰(zhàn)的開始和北約的成立,德國(聯(lián)邦德國)才重新開始研制533 mm重型魚雷。
經(jīng)過之后近10 年的努力,通過對二戰(zhàn)已有技術的繼承和對美國相關技術的借鑒,德國戰(zhàn)后第1 條重型魚雷“海蛇”于1967 年列裝服役,從此開啟了魚雷研發(fā)的新篇章,并使德國魚雷工業(yè)的傳統(tǒng)優(yōu)勢得以延續(xù)。從20 世紀50 年代后期到80 年代,德國先后研制了DM1“海蛇”、“水精”、“海豹”DM2 及改良型DM2A1,SST 3,ST-4 和SUT 等7 款魚雷[2]。這一系列魚雷由于結構和性能均較為接近,技術水平未有質的提升,基本可歸為德國戰(zhàn)后第1 代重型魚雷。
基于自身海軍現(xiàn)代化建設需求和國際軍火市場高性能武器競爭的日益劇烈,從20 世紀80 年代開始,德國啟動了第2 代重型魚雷的研制發(fā)展。圖1 為德國重型魚雷主要型號及發(fā)展脈絡。

圖1 德國重型魚雷型號發(fā)展脈絡圖Fig.1 German heavy torpedo model development venation diagram
1 第2 代重型魚雷技術發(fā)展規(guī)劃
由于魚雷的作戰(zhàn)使用區(qū)域擴大,所以一方面軍方需要速度更快、發(fā)射深度更大、定位性能更加良好的重型魚雷;另一方面,也希望潛艇使用靈敏度更高的傳感器,以便在被動定位時能有更好的目標跟蹤和分辨能力。此外,潛艇發(fā)現(xiàn)目標后魚雷攻擊的反應時間應該縮短,當出現(xiàn)多個目標時,希望潛艇能夠齊射或連射多條魚雷進行作戰(zhàn),以提高攻擊成功率。以上需求對德國第2 代魚雷發(fā)展提供了牽引,決策層認為下一步研發(fā)的重點是制造多用途高性能的反艦/反潛魚雷,就像AEG-德律風根(AEG-TelefunkGS)公司生產(chǎn)的SUT 電動線導魚雷一樣[2]。
1982 年1 月,德國潛用魚雷研發(fā)項目得到批準,分2 個技術階段實施。
第1 階段,以DM2A1 為技術基礎,通過改進定位、電子及制導系統(tǒng),研制DM2A3 反艦/反潛兩用魚雷。早在1977 年,AEG 公司就曾首次提出上述建議。1982 年后戴姆勒-奔馳公司接管AEG,從而引發(fā)了阿特拉斯電子有限公司名下德國魚雷制造基地的更名。1983 年2 月德國軍方的“魚雷服役通知”上就已經(jīng)作出了明確表示:第2 代魚雷DM2A3 的試驗工作將于1988 年結束,1991 年實現(xiàn)批量交付。挪威向德國定購的210 級潛艇也應支持DM2A3 魚雷的發(fā)射。
第2 個研發(fā)階段旨在提高動力推進系統(tǒng)的功率,具體目標如下:航速20~50 kn,最大航程50 km,最大發(fā)射深度約達到500 m。這種新型魚雷開始計劃列裝211 級潛艇,后來主要用于性能更加先進的212 級AIP 燃料電池潛艇,并得名DM2A4。當時預計1998 年可以達到目標。
2 DM2A3 魚雷的技術研發(fā)分析
1980 年初開始了DM2A3 魚雷的初樣設計,1 年后進入定型設計階段,1983 年開始進入試產(chǎn)階段,此時新魚雷的樣機已經(jīng)誕生。
有了SUT 兩用魚雷的制造經(jīng)驗,再依靠計算機和電子技術的快速發(fā)展,改進魚雷自導、數(shù)據(jù)傳輸和軟件的工作如期完成,DM2A3 魚雷的研制及試驗工作也于1990 年結束,DM2A3 得名Seehecht(“無須鱈”),而用于出口的該種魚雷被稱為Seahake(“海鱈”)[3]。
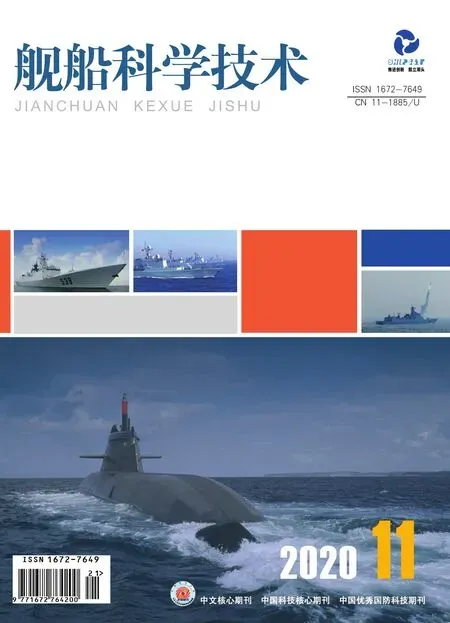
DM2A3 魚雷的檢測技術和方法較原來的魚雷型號也有較大進步。在工房進行一次全計算機控制的外部激勵測試大約需要1 h。在潛艇上則可以使用1 套全自動的自檢程序BITE(Built in Test Equipment),測試及檢驗可在10 s 內(nèi)完成,這對提高潛艇水下作戰(zhàn)的快速反應能力很有幫助。圖2 中2 條DM2A3 魚雷拆卸后正在進行測試。
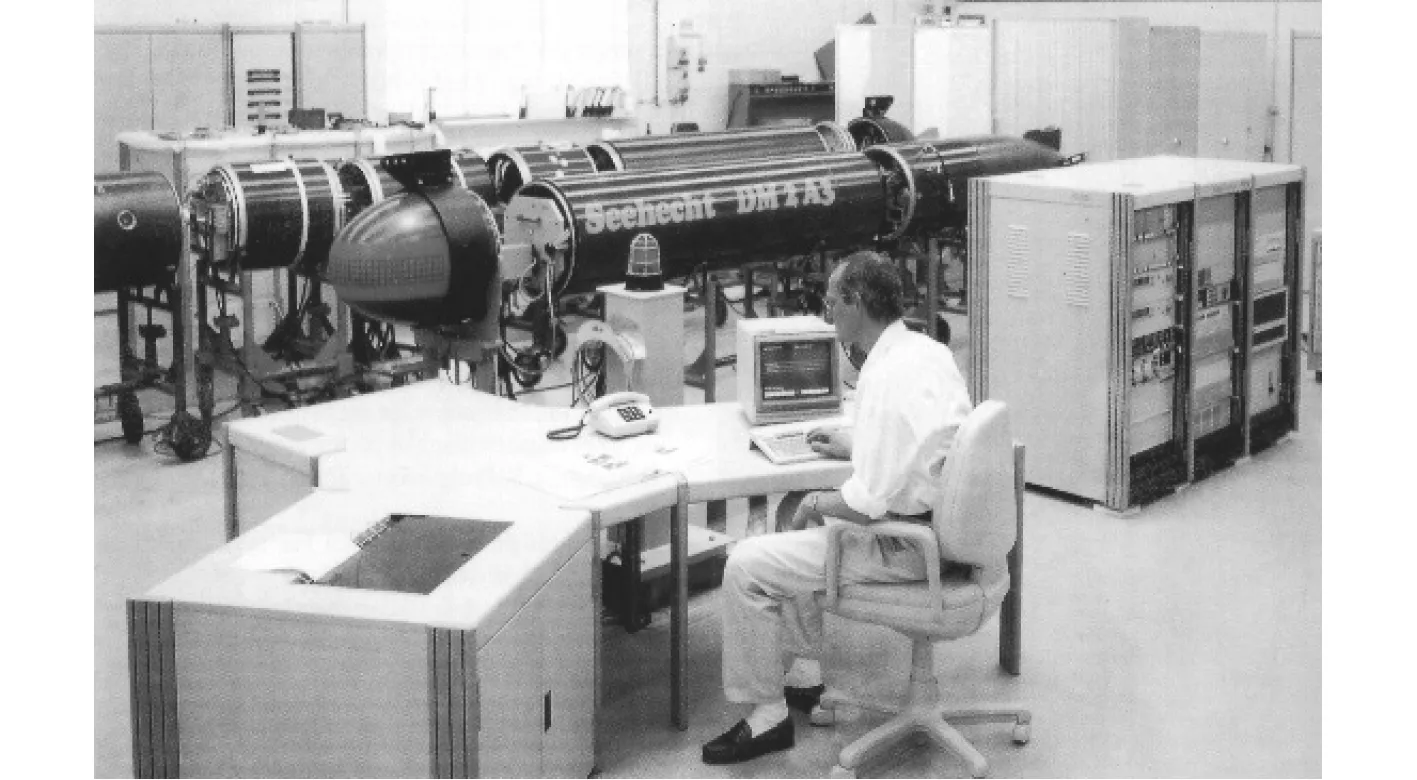
圖2 阿特拉斯公司的魚雷總調工房Fig.2 Atlas's torpedo general shift
DM2A3 魚雷長6150 mm,重1451kg,與DM2A1 魚雷相比,其電子設備更加先進,電子電路從74 條/64 路減少到24 條/12 路。DM2A1 魚雷共有1000 余個晶體管、500 個半導體,而DM2A3 魚雷依托微電子技術的進步,電路集成水平達到只有3 個CPU 單元和198 個模數(shù)混合模塊。

圖3 DM2A3 教學解剖雷Fig.3 DM2A3 teaching anatomy torpedo
DM2A3 魚雷頭部的聲自導系統(tǒng)是全新開發(fā)的,自導聲學裝置位于外部帶4×36 水聲換能器的固定條形基陣上(見圖4 左),而并不如以前型號那樣位于內(nèi)部可旋轉基陣,該聲學布局受到德國海軍的青睞。雷頭之后的戰(zhàn)斗部與DM2A1 相似,可裝藥250 kg 左右。引信系統(tǒng)裝在戰(zhàn)斗部內(nèi),包括觸發(fā)引信和電磁引信。電磁起爆時,雷尾的2 個極向線圈產(chǎn)生低頻交流磁場,接近目標時就會產(chǎn)生感應磁場。魚雷頭部的電磁傳感器能夠感應2 個磁場疊加產(chǎn)生的垂直分量,從而為起爆提供動作信號。觸發(fā)引信可以通過加速系統(tǒng)(以彈簧—撞針原理為基礎的質量慣性系統(tǒng))觸發(fā)。

圖4 DM2A3(左)與DM2A1 魚雷頭部比較Fig.4 The head of DM2A3 torpedo (left) compared with that of DM2A1 torpedo
DM2A3 魚雷動力電池也是與DM2A1 相似的鋅/氧化銀電池,電池能量約為20 kW 時,功率約為80 kW。
全新開發(fā)的全雷核心控制組件是中央電子設備,魚雷航行所需的所有數(shù)據(jù)均由該設備提供,該設備還能實現(xiàn)線導導引過程中的數(shù)據(jù)傳輸。其制導能力可適用于對抗條件下的反艦和反潛攻擊。
核心控制組件還能根據(jù)電磁磁場的垂直分量,計算出引信所受的電磁脈沖。
魚雷戰(zhàn)斗部之后布置的是傳感器部分:航向、深度、橫傾的實際值可通過航向-位置關聯(lián)系統(tǒng)進行測量,該系統(tǒng)為航向和深度陀螺儀集成系統(tǒng),數(shù)控減搖,深水控制性能良好。通過2 個分別用于淺水和深水的深度傳感器進行深度測量。
和DM2A1 魚雷一樣,DM2A3 魚雷也由1 臺轉速較慢、雙向旋轉的直流串激電動機推進[4],電動機重130 kg,魚雷實際航行速度由電動機轉速決定。

圖5 DM2A3 魚雷推進電機Fig.5 The propulsion motorof the DM2A3 torpedo
70 年代前半期DM2A1 魚雷使用的是鋁制6/5 翼型雙螺旋槳,80 年代魚雷研發(fā)中轉而使用6/5 側斜螺旋槳,工作噪聲進一步降低。
雷尾后面是一個線導放線裝置(尾箱)。魚雷發(fā)射時,該裝置留在潛艇發(fā)射管內(nèi),箱內(nèi)裝有8000 多米線導導線和導線防護裝置。
按照原計劃,DM2A3 魚雷的武器系統(tǒng)是1979 年德國-挪威政府協(xié)議所確定的指揮及作戰(zhàn)系統(tǒng),該系統(tǒng)由挪威著名的軍工集團康斯博格公司(A/S Kongsberg Vaapenfabrik)負責完成。但是由于潛艇作戰(zhàn)系統(tǒng)的研發(fā)工作要到1987 年才能結束,而80 年代中期206 級潛艇升級為206A 的工作已經(jīng)完成,為了能將新型DM2A3 魚雷投入使用,引進了阿特拉斯電子公司生產(chǎn)的主/被動中頻聲吶以及魚雷射擊火控系統(tǒng)[5]。
1989 年7 月至1992 年2 月間,改造后的12 艘206A 級潛艇開始服役(第1 階段)。剛開始這些潛艇并沒有裝載DM2A3 魚雷,直到1994 年秋開始配裝DM2A3 魚雷(第2 階段),圖6 為206A 潛艇從艇首裝載DM2A3 操雷。這款新型魚雷的發(fā)射流程主要分以下幾個步驟:
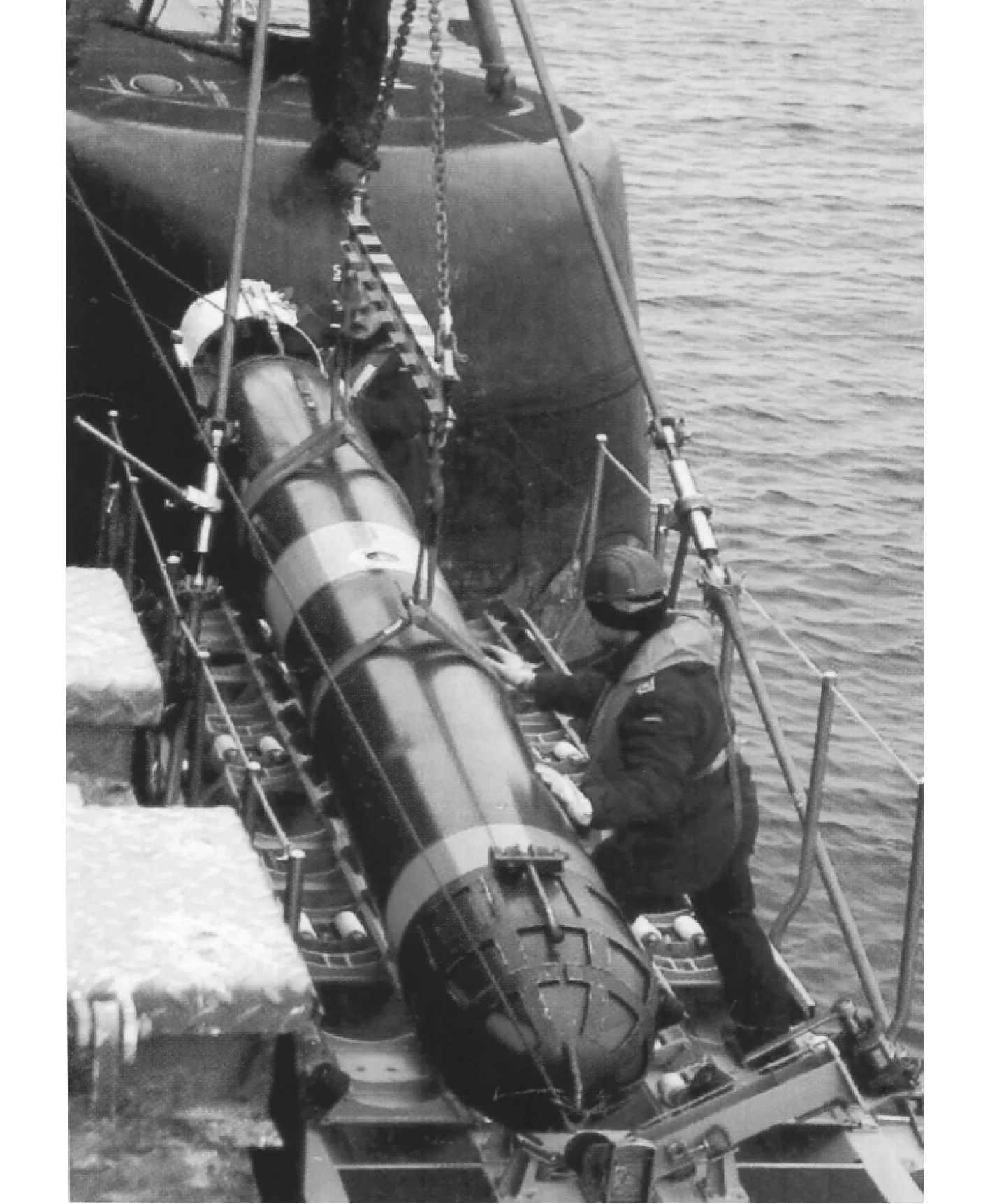
圖6 206A 潛艇裝載DM2A3 操雷Fig.6 The 206A submarine is loaded with a DM2A3 torpedo
1)在潛艇作戰(zhàn)系統(tǒng)支持下進行目標識別和分級,推定目標航行路線及作戰(zhàn)方案。通過導線連接魚雷和艇上指令裝置。收到魚雷發(fā)出“準備發(fā)射”信息后,潛艇火控系統(tǒng)向魚雷發(fā)出“預備”指令,魚雷激活電池,并開始數(shù)據(jù)裝定傳輸,直到火控系統(tǒng)收到魚雷反饋信號“正常發(fā)射”。
2)啟動水下航行程序,發(fā)動機進入工作狀態(tài),魚雷發(fā)射出管,大約10 s 后開啟雷上導線和艇上導線之間的通信鏈路。
3)采用安全控制,魚雷走出安全距離(設定90 m,150 m 或者300 m)后引信才能解除保險,從而保證魚雷爆炸不對發(fā)射潛艇造成危害。
4)魚雷航行過程中,可通過潛艇傳感器進行目標跟蹤,不斷更新目標方位。潛艇對魚雷進行導引,使其到達預期目標位置,或者直接命中目標(難度較大)。期間,魚雷的航向、航深和速度由自身控制系統(tǒng)決定,也可以選擇使用潛艇計算機進行自動或人工導控。
5)跟蹤攻擊階段,魚雷自導系統(tǒng)自行探測和識別目標。必要時可啟用魚雷內(nèi)部制導程序,此時由線導監(jiān)視魚雷航行。收到線導優(yōu)先指令后,魚雷又可重新回到線導控制狀態(tài)。
6)如果魚雷未能命中目標,當電池能量耗盡或者航行速度低于3 kn 時,引信失效。魚雷由于自身負浮力而沉入海底。
7)平時訓練時,使用操雷頭和二次電池代替戰(zhàn)雷頭和原電池。操雷頭內(nèi)裝有測量記錄設備,最大存儲容量為80 W。訓練魚雷的雷頭、電池艙段和雷尾部分都會涂上亮紅色,便于海上尋找。
3 DM2A4 魚雷的技術途徑分析
1982 年,在DM2A3 魚雷研發(fā)的后期,DM2A4 魚雷研制開始啟動。這次研發(fā)旨在提高魚雷航速、航程和發(fā)射深度,如果使用當時的魚雷推進裝置,根本無法達到這些目標。于是在設計階段嘗試了各種驅動方法,熱動力推進系統(tǒng)漸漸引起了研究者的注意,這種推進系統(tǒng)的能力密度高于電力推進。曾經(jīng)應用于DM1 魚雷并引起爭議的汪克爾發(fā)動機(一種活塞在氣缸內(nèi)作旋轉運動的新型內(nèi)燃機)也是其中一個研究項目,另一種推進系統(tǒng)方案是采用鋁/氧化銀電池的電力系統(tǒng)[6]。
由于研發(fā)熱力推進系統(tǒng)的時間更長,風險更大,而且工作時產(chǎn)生的噪聲也更大,這些不太符合當時德國的魚雷發(fā)展理念,因此以放棄更快速度為代價,選擇了電力推進系統(tǒng)。發(fā)動機采用1 臺高速7 相永磁異步電機,帶電子整流和低噪聲減速器,魚雷在攻擊時既能達到所需速度,又不會產(chǎn)生過大的航行噪聲。
魚雷航行時,可通過葉片數(shù)量為前9 后7(見圖7)的傾斜式對轉螺旋槳提供航行動力。光纖通信導線代替銅絲導線(見圖8)。有了帶光纖陀螺的數(shù)字捷聯(lián)系統(tǒng),精確控制魚雷航向及位置成為可能。

圖7 DM2A4 魚雷的9/7 螺旋槳Fig.7 The 9/7 propellerof the DM2A4 torpedo
圖8 DM2A4 戰(zhàn)斗魚雷剖面及部件圖Fig.8 The profile and component drawings of DM2A4 combat torpedo
DM2A4 魚雷的搜索及跟蹤系統(tǒng)沿用DM2A3 的技術,雖然211 級潛艇的性能指標有所提升,而且計劃裝備DM2A4 魚雷,但這套系統(tǒng)仍然適用。1987 年,德國海軍放棄211 級潛艇項目后,開始加速研發(fā)212 級燃料電池潛艇,211 級潛艇的大部分技術都能直接用于212 級潛艇,所以DM2A4 魚雷也列裝到212 級平臺上。

圖9 DM2A4 魚雷雷頭(后方是操雷段)Fig.9 The head of the DM2A4 torpedo(the rear part is for training)
DM2A4 魚雷在設計定型階段,由于時間和經(jīng)費方面出現(xiàn)了問題,鋁/氧化銀電池的研制遇到困難,所以不得不重新采用改進后的鋅/氧化銀電池。戰(zhàn)雷電池組由4 組相同的電池結構組成,每組電池結構包括86 塊單體電池。單體電池由7 片薄片連接而成,由水槽冷卻。
1996 年DM2A4 魚雷設計定型,1997 年開始加工制造。如果按照原計劃,批產(chǎn)制造階段應從1998 年開始,到2001 年結束。然而2001 年未能完成相關工作,其試驗工作也不得不推遲。但由于212A 級潛艇的制造也同時延遲,所以這種高功率新型魚雷正好被用來驗證世界上第1 艘常規(guī)蓄電池與燃料電池復合動力潛艇—U31 的性能[7]。
4 新世紀德國魚雷的轉型發(fā)展
21 世紀以來,德國軍隊的使命任務經(jīng)歷了巨大改變,潛艇的主要任務不再是保衛(wèi)北約成員國的安全,而是“對抗種族及意識形態(tài)侵略者和全球范圍內(nèi)的恐怖分子”[8]。
雖然先進魚雷和導彈具有強大的目標獲取及破壞力,但是傳統(tǒng)上的潛在威脅不再占據(jù)主導地位,重要的是,潛用武器能夠在對方不發(fā)覺的情況下進行偵察和打擊,可以監(jiān)視海岸及航道上的各種活動,從而發(fā)現(xiàn)恐怖組織的后勤聯(lián)系,必要時可以采取破壞措施將其中斷。所以,現(xiàn)在德國國防部及其下屬潛艇艦隊的新理念是:魚雷發(fā)射管可能更多用于掃雷潛水員和輕裝潛水員的出艇;同樣,使用專門的AUV(自主無人潛航器)也比直接發(fā)射戰(zhàn)斗魚雷更有特定價值。
德國潛艇的特征主要是噪聲小、非磁性、易控制等,所以更適于執(zhí)行上述反恐任務。在極淺水域或者受到重重防護的地區(qū),可以使用AUV 前出偵察預警,大大擴展?jié)撏晠茸饔脜^(qū)域,降低潛艇受到的風險,提高自身隱蔽性。所以也就不難理解為什么現(xiàn)在許多魚雷生產(chǎn)商開始研發(fā)制造AUV 和ROV(線控水下航行器)。
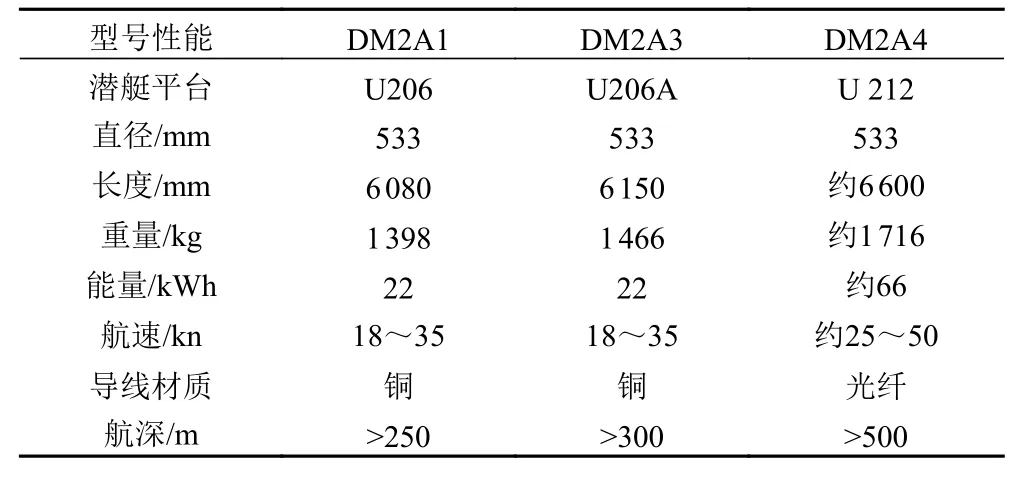
表1 德國重型魚雷主要參數(shù)對照表Tab.1 The parameter of Germany heavy torpedo
德國已經(jīng)發(fā)展了3型平臺式軍用UUV,分別是“海獺”MKI,MK II 和DeepC 型[9],[11],還有一型稱為Orca 的有人/無人兩用水下航行器[10],這些UUV 體積重量較大,無法由潛艇攜載發(fā)射。因此,利用DM2A4作為載體研發(fā)潛用UUV,仍然有著較強的作戰(zhàn)需求。
按照模塊式理念構建的DM2A4 魚雷家族現(xiàn)在成了發(fā)展?jié)撚肬UV 武器(DM2A4-UUV)的基礎[12],這種小型水下無人作戰(zhàn)平臺相對魚雷武器來說比較容易制造,而且很快就能投入使用。它可以不裝戰(zhàn)斗裝藥和引信,也可以適當減少部分動力電池,這些空間可以被專用偵察聲吶、遙控爆炸裝置等代替,這里所說的遙控爆炸裝置可用于裝載沉底水雷或者主動對抗式硬殺傷反制器SEAFOX-UUV(見圖10)。

圖10 SEAFOX-UUV 外形Fig.10 SEAFOX-UUV appearance
德國DM2A4 魚雷系列中的增程型代號為SeaHake mod4 ER(見圖11),最大射程達到140 km,僅次于俄羅斯的“波塞冬”洲際魚雷(也稱Status-6 型核動力UUV[13])。SeaHake mod4 ER 實際上屬于攻擊型UUV的范疇,除了用于潛艇發(fā)射,還用于海上平臺和陸基平臺部署,實現(xiàn)以兵器深入代替兵力深入,具備在敵防區(qū)外或低警戒區(qū)域實施遠程水下打擊的能力。

圖11 DM2A4 ER 增程型魚雷Fig.11 The extended rangeDM2A4 ER torpedo
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32