基于鯨魚優(yōu)化算法的模糊神經(jīng)PID參數(shù)自整定
2020-12-22 11:14:34趙繼民付珍珠
天津科技大學(xué)學(xué)報 2020年6期
關(guān)鍵詞:優(yōu)化
趙繼民,付珍珠
(天津科技大學(xué)電子信息與自動化學(xué)院,天津 300222)
PID控制具有結(jié)構(gòu)簡單、工作可靠、容易實現(xiàn)、控制效果好、魯棒性強(qiáng)、調(diào)整方便等特點(diǎn),同時它原理簡單、有著明確的參數(shù)物理意義[1],因而在工業(yè)過程控制中得到了廣泛應(yīng)用.而 PID控制器參數(shù)的優(yōu)劣直接決定了 PID控制系統(tǒng)的控制效果與質(zhì)量,因此,對 PID控制器參數(shù)整定法的研究具有重要的實際意義.傳統(tǒng)PID控制器如Ziegler-Nichols整定參數(shù)經(jīng)常在設(shè)定點(diǎn)附近產(chǎn)生較強(qiáng)的振蕩,并伴有較大的超調(diào)量[2].
近年來,智能 PID控制技術(shù)得到廣泛應(yīng)用,將模糊控制、神經(jīng)網(wǎng)絡(luò)、遺傳算法、粒子群算法、蟻群算法等和 PID控制器結(jié)合[3],進(jìn)一步提高控制系統(tǒng)性能.2016年,一種新型的群智能優(yōu)化算法——鯨魚優(yōu)化算法(whale optimization algorithm,WOA)由澳大利亞學(xué)者 Mirjalili等[4]提出,該算法主要通過模擬自然界中座頭鯨群體狩獵行為來解決目標(biāo)函數(shù)的最優(yōu)解問題.鯨魚優(yōu)化算法(WOA)在收斂速度和最優(yōu)個體的隨機(jī)性等性能上均優(yōu)于其他智能優(yōu)化算法,目前,國內(nèi)學(xué)者已將該算法進(jìn)行應(yīng)用,例如,閆旭等[5]提出一種混合隨機(jī)量子鯨魚優(yōu)化算法求解 TSP問題;Abdel-Basset等[6]提出了一種混合鯨魚算法(HWA),即將鯨魚優(yōu)化算法(WOA)與局部搜索策略相結(jié)合,從而提高算法的性能.
針對模糊 PID控制器的積分誤差規(guī)則難以獲取,系統(tǒng)存在穩(wěn)態(tài)誤差,而神經(jīng)網(wǎng)絡(luò)能夠進(jìn)行復(fù)雜的邏輯操作,具有高度的并行性、非線性和自適應(yīng)的特點(diǎn),結(jié)合模糊系統(tǒng)、神經(jīng)網(wǎng)絡(luò)及 PID控制,本文建立一種新型的PID控制器,即模糊神經(jīng)PID控制器.同時,針對傳統(tǒng)的 BP學(xué)習(xí)算法[7]依賴于初始權(quán)值的選擇、只能處理必須能夠求導(dǎo)或者具有梯度的目標(biāo)函數(shù)等缺點(diǎn),本文采用新型的智能優(yōu)化算法,即鯨魚優(yōu)化算法(WOA),進(jìn)一步優(yōu)化訓(xùn)練模糊化的 BP神經(jīng)網(wǎng)絡(luò)的權(quán)值和偏置誤差,降低模糊神經(jīng)網(wǎng)絡(luò)被用于函數(shù)逼近所引起的誤差.
1 模糊神經(jīng)PID控制器
1.1 模糊神經(jīng)PID控制器參數(shù)整定系統(tǒng)結(jié)構(gòu)
本文采用的模糊神經(jīng) PID控制器的系統(tǒng)結(jié)構(gòu)如圖 1所示.基于模糊神經(jīng)網(wǎng)絡(luò)的 PID控制器參數(shù)整定[8]即是利用模糊神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)功能,在線調(diào)整網(wǎng)絡(luò)的輸出層權(quán)值、高斯隸屬函數(shù)的中心值和寬度,然后根據(jù)一定的原理對 PID的 3個參數(shù)進(jìn)行修改,最后得出一組合適的控制參數(shù),即 Kp、Ki、Kd,從而實現(xiàn)參數(shù)自整定.
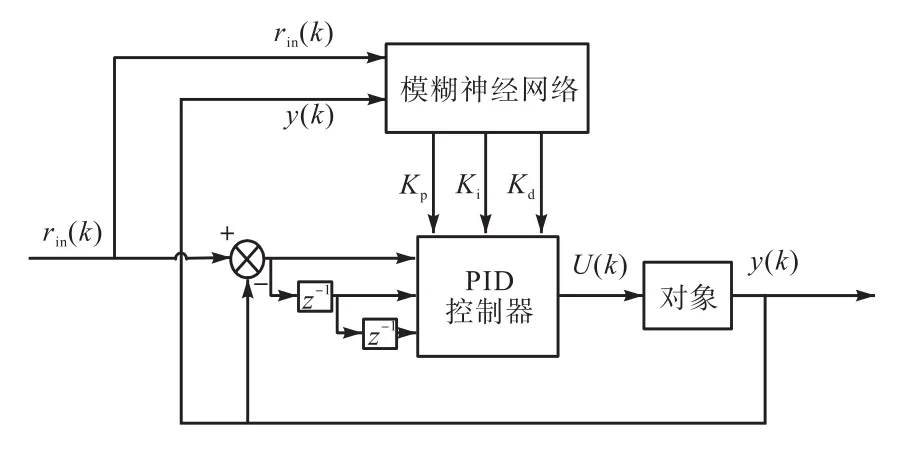
圖1 模糊神經(jīng)PID自整定系統(tǒng)結(jié)構(gòu)Fig. 1 Structure of fuzzy neural PID self-tuning system
圖 1中,假設(shè)系統(tǒng)處于第 n個時刻,rin(k)為系統(tǒng)的期望信號;y (k )為系統(tǒng)的實際輸出;Kp、Ki、Kd為 PID控制器的控制參數(shù);U(k)為 PID控制器的控制信號.
1.2 PID算法
PID控制是一種線性控制方法,主要是對系統(tǒng)偏差進(jìn)行比例、積分、微分操作并線性組合成控制量[1],以減小系統(tǒng)誤差,提高系統(tǒng)響應(yīng)速度和響應(yīng)效果.增量式 PID為數(shù)字 PID算法的一種基本形式,是通過將系統(tǒng)當(dāng)前時刻的控制量和上一時刻控制量的差值作為新的控制量來進(jìn)行PID控制的一種遞推算法.將采樣周期歸一化,根據(jù)遞推原理可得
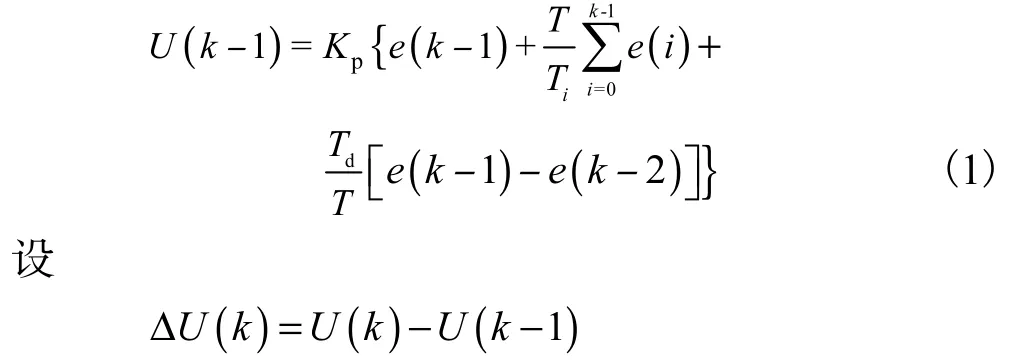
令Kp為比例系數(shù); Ki=Kp?T/Ti為積分系數(shù);Kd= Kp?Td/T為微分系數(shù),將上式簡化為

式中:e(k)為第k次采樣時刻輸入控制系統(tǒng)的偏差值;e(k ? 1 )為第k?1次采樣時刻輸入控制系統(tǒng)的偏差值;T為采樣周期.
1.3 模糊神經(jīng)網(wǎng)絡(luò)
模糊神經(jīng)網(wǎng)絡(luò)(fuzzy neural network,F(xiàn)NN)是模糊技術(shù)與神經(jīng)網(wǎng)絡(luò)技術(shù)的有機(jī)融合,可自動處理模糊信息.其實質(zhì)上是將神經(jīng)網(wǎng)絡(luò)的激勵函數(shù)、權(quán)等數(shù)據(jù)以及神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)算法進(jìn)行模糊化處理.基于標(biāo)準(zhǔn)型的模糊神經(jīng)網(wǎng)絡(luò)如圖2所示.其本質(zhì)上是一個5層前饋網(wǎng)絡(luò),分別為輸入層、隸屬度函數(shù)生成層、推理層、歸一化層和輸出層,通過誤差反傳的學(xué)習(xí)方法實現(xiàn)從輸入到輸出的非線性映襯.
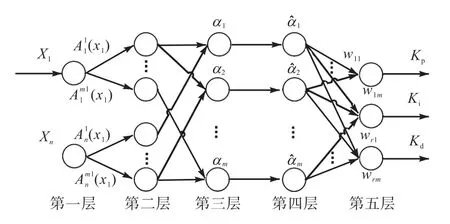
圖2 基于標(biāo)準(zhǔn)型的模糊神經(jīng)網(wǎng)絡(luò)Fig. 2 Fuzzy neural network based on standard selftuning system
第一層:輸入層,輸入節(jié)點(diǎn)是線性的,由 n個神經(jīng)元組成,將網(wǎng)絡(luò)的輸入信號傳送到下一層,其個數(shù)為輸入變量的個數(shù).
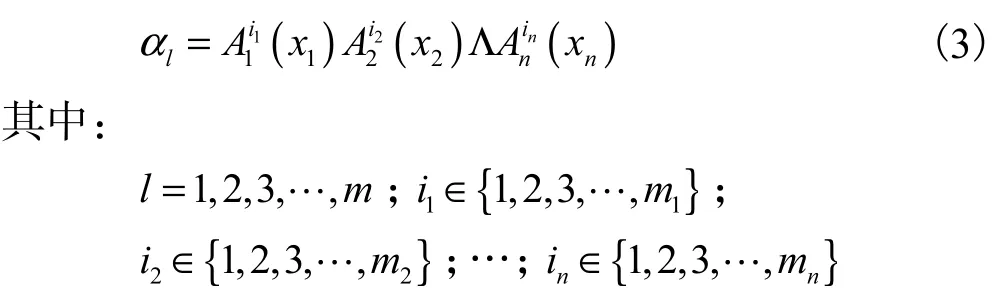
第二層:隸屬度函數(shù)生成層,該層的每個節(jié)點(diǎn)代表一個語言變量值,從而計算出相對應(yīng)的隸屬度函數(shù).其中:n是輸入變量的維數(shù);mi是xi的模糊分割數(shù)(規(guī)則數(shù)).
第三層:模糊推理層,該層的每個節(jié)點(diǎn)代表一條模糊規(guī)則,每條對應(yīng)的模糊規(guī)則被用于匹配模糊規(guī)則的前件,從而計算出每條規(guī)則的適用度.
第四層:歸一化層,節(jié)點(diǎn)數(shù)與第三層相同,實現(xiàn)適用度的歸一化計算.

第五層:輸出層,實現(xiàn)反模糊化計算,即輸出參數(shù)Kp、Ki、Kd的整定結(jié)果.
2 鯨魚優(yōu)化算法
鯨魚優(yōu)化算法(WOA)是一種新型的啟發(fā)式搜索算法,該算法啟發(fā)于一些以座頭鯨為代表的鯨類的特殊覓食行為——?dú)馀莶遏~,主要步驟為包圍獵物、氣泡網(wǎng)攻擊和搜索獵物.
2.1 包圍獵物
每個鯨魚相當(dāng)于一個個體,每條鯨魚能夠通過回聲定位計算出自身與其他鯨魚的位置,假設(shè)距離獵物最近的鯨魚位置為局部最優(yōu)解,其余隨機(jī)個體根據(jù)最佳鯨魚位置而實時更新,包圍獵物.對應(yīng)的數(shù)學(xué)模型為式(6)和式(7).

式中:t為迭代次數(shù);X*為截至目前所獲最佳解;X為當(dāng)前解.A、C為矩陣系數(shù),分別由式(8)、式(9)求解.

隨t的不斷增加,a從 2線性衰減到 0,如式(10)所示;r為[0,1]中的隨機(jī)向量.

式中:tmaxIter為最大迭代次數(shù).
2.2 氣泡網(wǎng)攻擊
在該階段,鯨魚在獵物周圍不斷釋放氣泡,形成一個氣體組成的幕墻,同時以螺旋方式游向獵物,螺旋更新位置的數(shù)學(xué)模型如式(11)所示.

式中:b為常數(shù);l為[0,1]中隨機(jī)向量.
2.3 搜索獵物
在此階段,鯨魚隨機(jī)游走,全局搜尋獵物,數(shù)學(xué)模型為

式中:Xrand為鯨魚種群中隨機(jī)個體的位置.

2.4 BP算法
定義目標(biāo)函數(shù)如下,目標(biāo)是使該誤差函數(shù)極小.

式中:rk為期望輸出;yk為當(dāng)前輸出.
首先,正向計算出從輸入點(diǎn)到輸出點(diǎn)的當(dāng)前輸出yk.其次,反向計算從輸出層到輸入層的隱節(jié)點(diǎn)
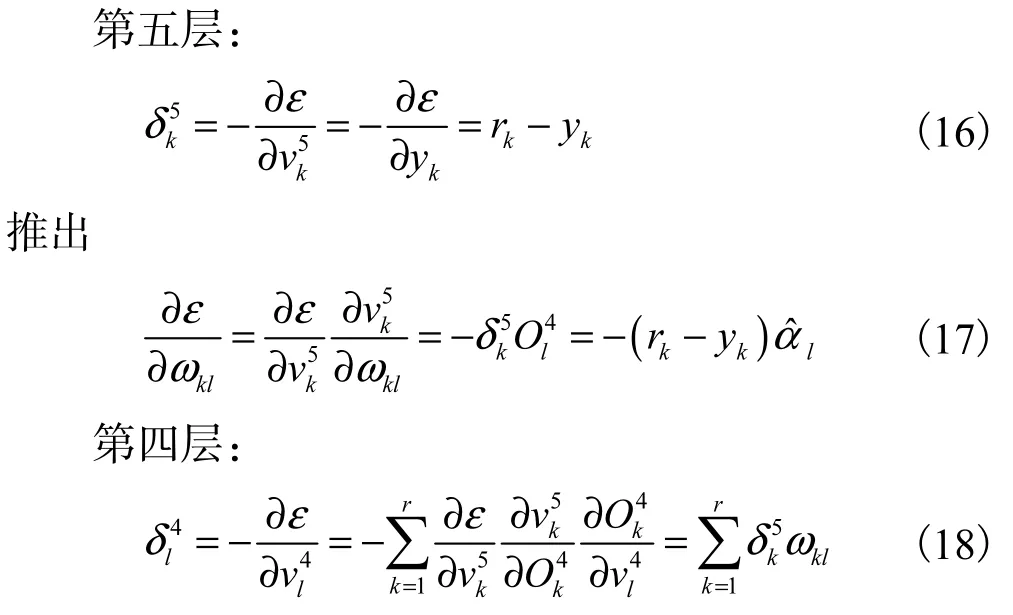
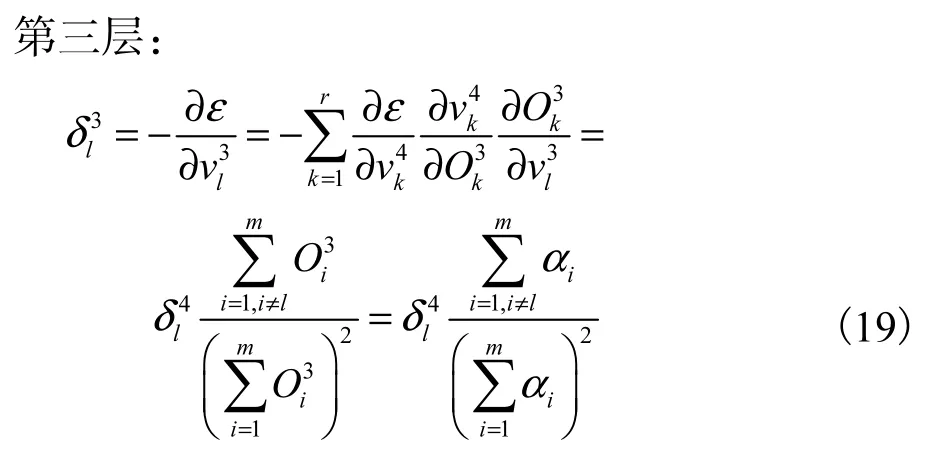
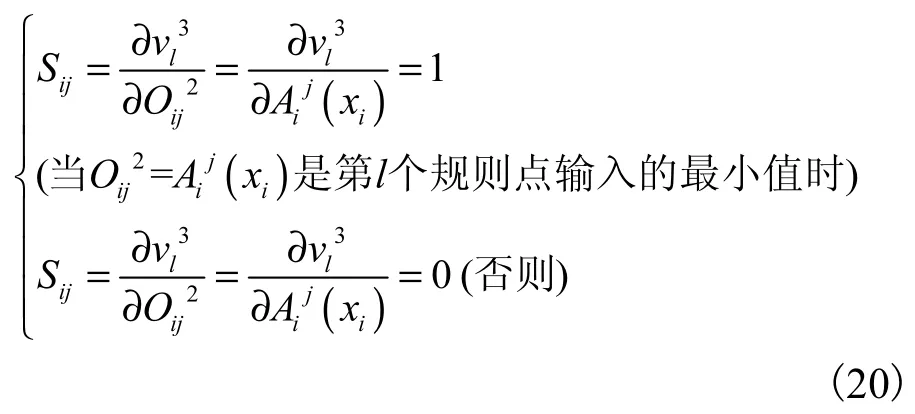
當(dāng)采用取小運(yùn)算來計算局部域時
當(dāng)采用相乘運(yùn)算來計算局部域時
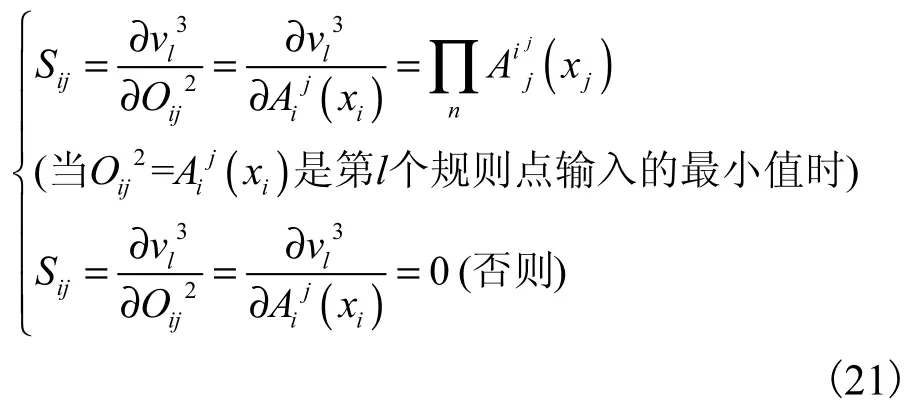
由式(20)和(21)可得一階梯度

由式(22)和(23)可求得參數(shù)的學(xué)習(xí)算法
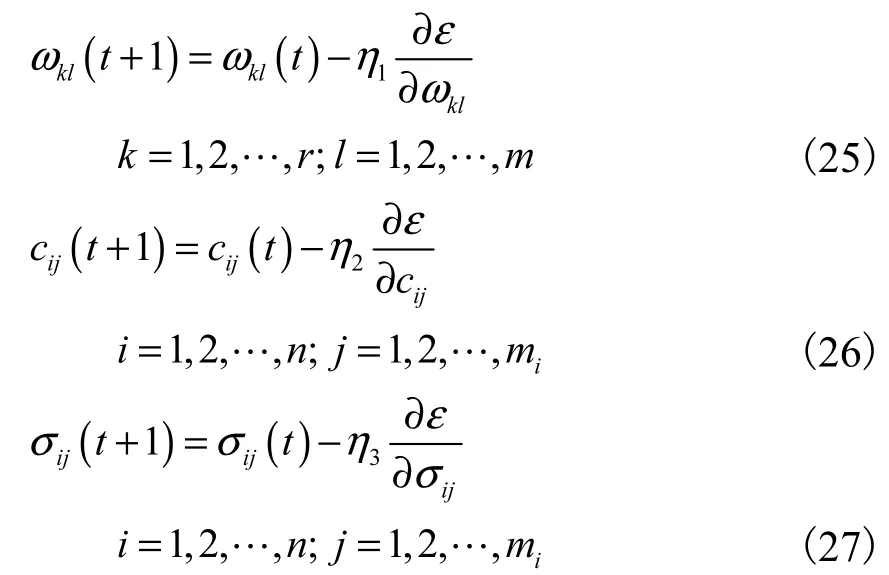
式中:t為網(wǎng)絡(luò)的迭代次數(shù);η為學(xué)習(xí)率且η>0.
3 鯨魚優(yōu)化算法與BP網(wǎng)絡(luò)混合算法
3.1 混合算法步驟
本文采用鯨魚優(yōu)化算法(WOA),并將該優(yōu)化算法應(yīng)用到經(jīng)模糊化處理的 BP神經(jīng)網(wǎng)絡(luò) PID控制器中,優(yōu)化訓(xùn)練模糊神經(jīng)網(wǎng)絡(luò)參數(shù)連接權(quán)值ωij、隸屬函數(shù)中心值cij和隸屬函數(shù)寬度σij.
混合算法的具體步驟如下:
(1) 初始化參數(shù) ωij、cij、σij及鯨魚種群體{Xi,i = 1 ,2,… ,N },參數(shù) t=0;設(shè)置種群規(guī)模 N,目標(biāo)函數(shù)維數(shù)Dim,最大迭代次數(shù)tmaxIter.
(2)根據(jù)適度值函數(shù){f(Xi), i = 1 ,2,… ,N },求出每只鯨魚的適度值并找出最優(yōu)解 Best_sco,得到最優(yōu)個體的位置Best_pos.
(3)評價鯨群,計算每個鯨魚的目標(biāo)函數(shù)值并判斷其是否達(dá)到精度要求,若滿足,則輸出最優(yōu)參數(shù)ωij、cij、σij,否則,按照鯨魚優(yōu)化算法迭代和更新,直到滿足結(jié)束條件.
(4)對經(jīng)過鯨魚算法優(yōu)化的參數(shù)按照模糊規(guī)則進(jìn)行處理,根據(jù) BP算法進(jìn)行學(xué)習(xí),進(jìn)而得到參數(shù)的最優(yōu)解.
(5)根據(jù)輸出層與參數(shù)ijω的關(guān)系,即式(10)得到參數(shù) Kp、Ki、Kd最優(yōu)解.
3.2 混合算法流程
將基于鯨魚優(yōu)化算法的模糊神經(jīng)網(wǎng)絡(luò)簡稱為WOA-FNN,則此混合算法的流程如圖3所示.
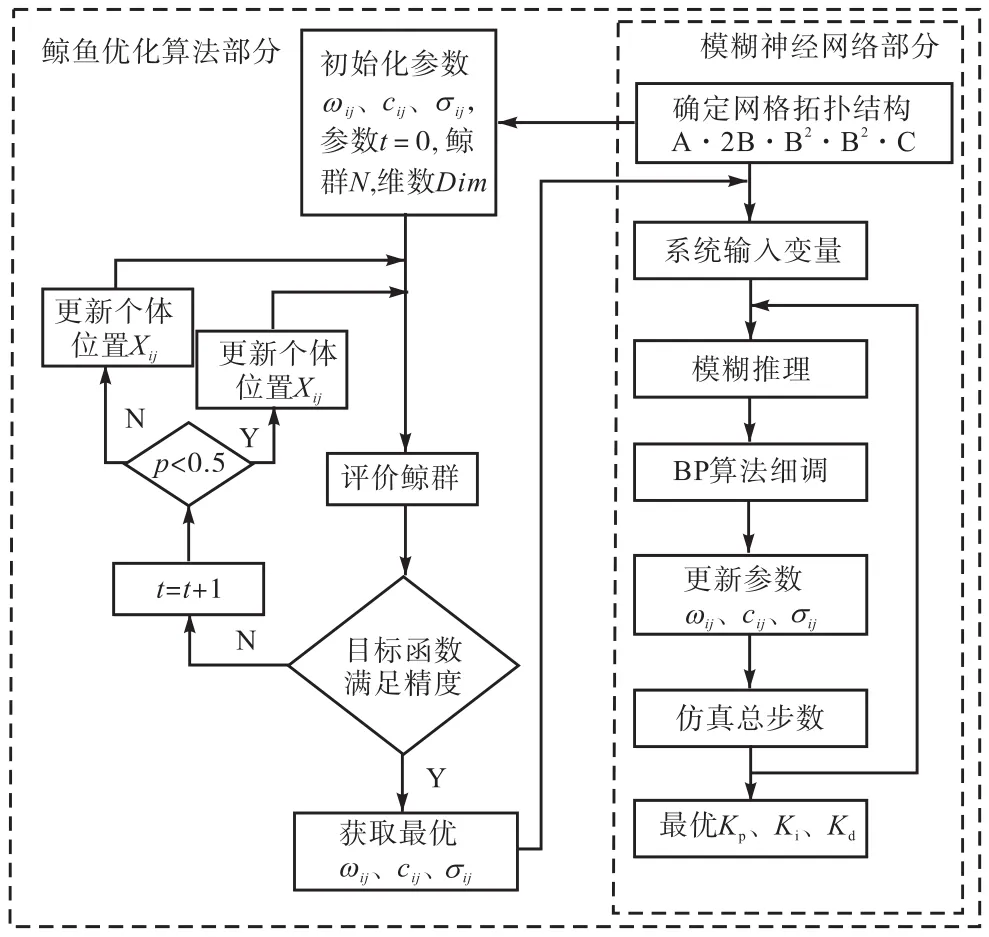
圖3 混合算法流程圖Fig. 3 Flow chart of hybrid algorithm
4 Matlab仿真實驗
為了驗證文中所提鯨魚優(yōu)化算法在 PID控制中的應(yīng)用,本文采用 Matlab軟件進(jìn)行仿真[9-12],并與基于模糊 PID參數(shù)自整定及基于混沌遺傳算法的 PID參數(shù)自整定結(jié)果進(jìn)行比對說明.參考文獻(xiàn)[6]采用如下二階傳遞函數(shù)作為被控對象:
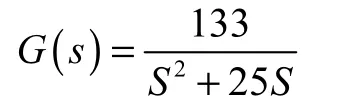
其中,采樣時間為 1 ms,給定響應(yīng)信號為 1.模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)為 2-10-25-25-3;輸入分別為偏差e及偏差率ec,e取值范圍為[-3,3],ec取值范圍為[-3,3];網(wǎng)絡(luò)權(quán)值wij取值范圍為[-1,+1],隸屬函數(shù)基寬bij取值范圍為[0.1,+3],隸屬函數(shù)中心值cij取值范圍為[-3,+3].鯨魚種群個數(shù)為 30,最大迭代次數(shù)為500.
為了驗證鯨魚優(yōu)化算法的可行性,將其與傳統(tǒng)的蟻群算法作比較,分別從目標(biāo)函數(shù)的優(yōu)化結(jié)果及獲取參數(shù) Kp、Ki、Kd的時間方面進(jìn)行對比,仿真結(jié)果如圖4和圖5所示.
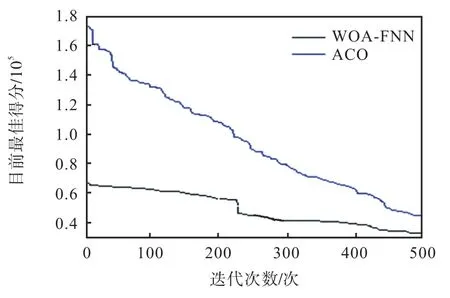
圖4 目標(biāo)函數(shù)優(yōu)化Fig. 4 Objective function optimization algorithm
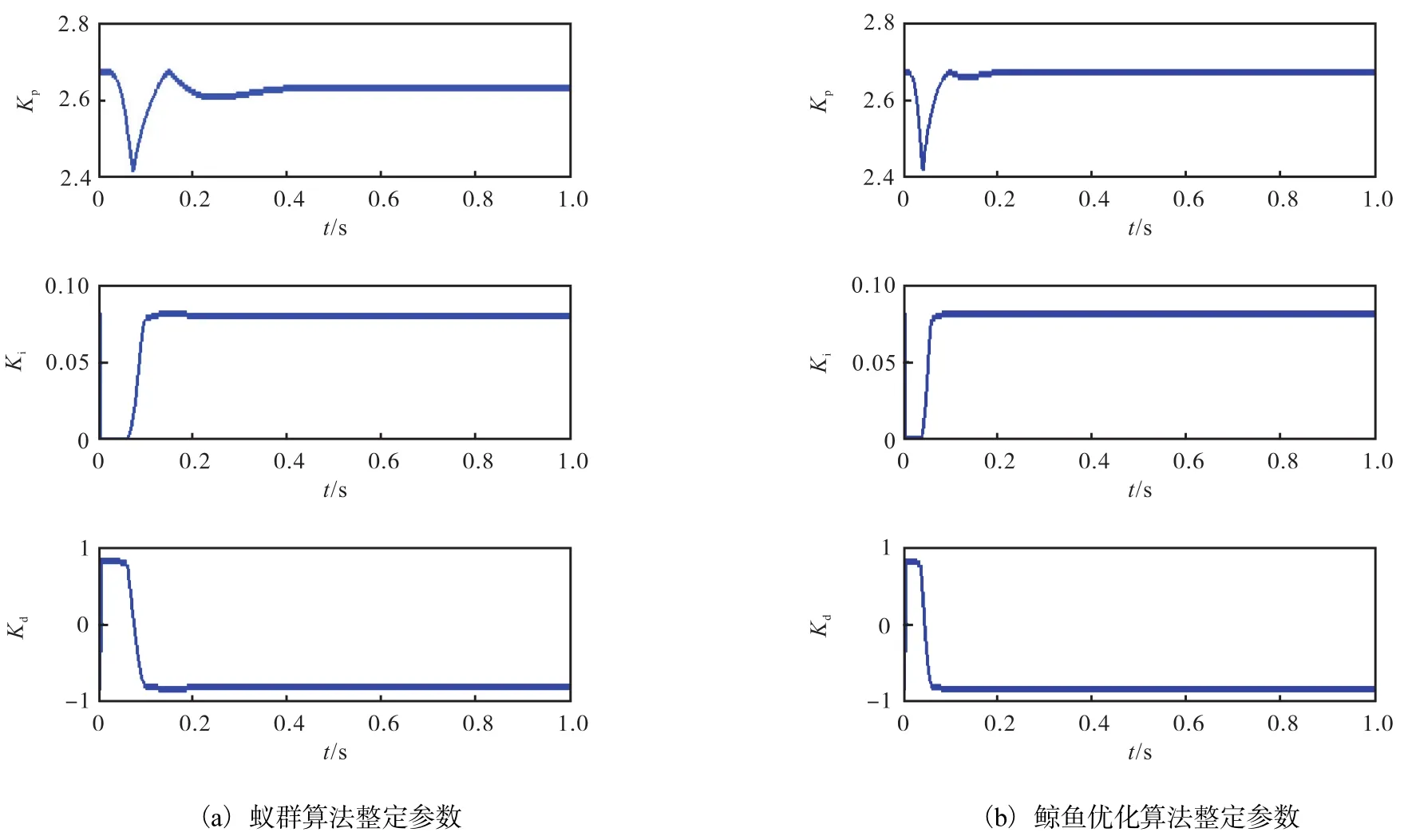
圖5 各算法整定參數(shù)Fig. 5 Setting parameters of each algorithm
仿真結(jié)果表明:圖4中鯨魚優(yōu)化算法目標(biāo)函數(shù)優(yōu)化的時間明顯優(yōu)于蟻群算法;圖 5(b)中參數(shù) Kp、Ki、Kd的整定時間明顯比圖 5(a)中參數(shù)整定的時間快,從而證明該鯨魚優(yōu)化算法的可行性.
為了驗證基于鯨魚優(yōu)化算法的 PID控制器性能,分別與基于模糊 PID控制器及基于混沌遺傳算法的 PID控制器性能作比較,統(tǒng)計結(jié)果見表 1,其中:Ymax為階躍響應(yīng)信號的最大值,tr為上升時間,ts為調(diào)整時間,tmax為峰值時間,σ為超調(diào)量.
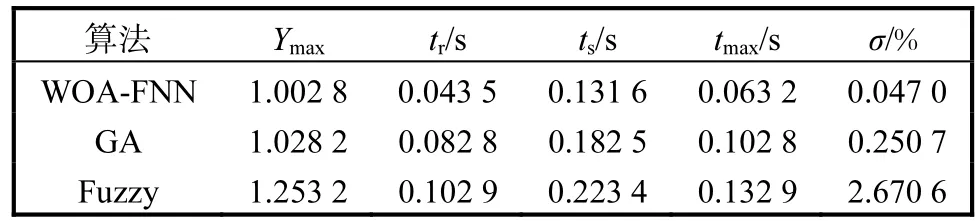
表1 各算法性能參數(shù)比較Tab. 1 Comparison of performance parameters of various algorithms
仿真結(jié)果如圖 6所示,結(jié)果顯示基于模糊 PID控制器的階躍響應(yīng)相對另兩種算法整定超調(diào)量明顯,上升時間長;基于混沌遺傳算法的 PID控制器的階躍響應(yīng)的超調(diào)量雖優(yōu)于基于模糊算法的 PID整定,但其調(diào)整時間和峰值時間不占優(yōu)勢;而本文設(shè)計的基于鯨魚優(yōu)化算法的 PID控制器的階躍響應(yīng)的超調(diào)量和動態(tài)性能明顯優(yōu)于其他響應(yīng)結(jié)果.
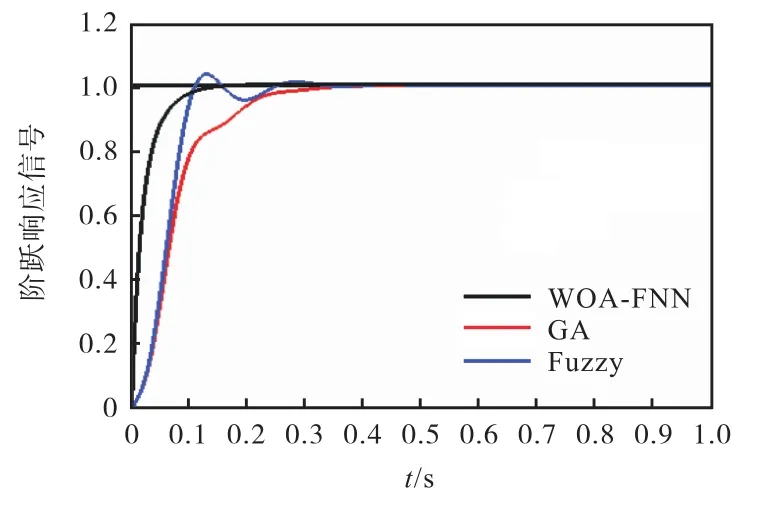
圖6 各算法階躍響應(yīng)Fig. 6 Step response of algorithms
5 結(jié) 語
PID控制器自問世以來,一直在工業(yè)生產(chǎn)過程中廣泛應(yīng)用,控制技術(shù)也已相當(dāng)成熟,而對于其參數(shù)的精度一直是各國研究學(xué)者追求的目標(biāo).本文在參考現(xiàn)有整定技術(shù)的前提下,提出了基于鯨魚優(yōu)化算法的模糊神經(jīng) PID控制器參數(shù)整定.綜合模糊規(guī)則和神經(jīng)網(wǎng)絡(luò)的優(yōu)點(diǎn)設(shè)計了模糊神經(jīng)系統(tǒng).仿真結(jié)果表明,系統(tǒng)的動態(tài)性能和穩(wěn)態(tài)精度均得到了良好的改善.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
