PLC 和網絡技術在礦山風機站集控系統中的應用
2020-12-23 11:09:38張東永
礦山機械 2020年12期
張東永,孫 越,黃 艷
1金川集團股份有限公司二礦區 甘肅金昌 737100
2金川集團股份有限公司銅業公司 甘肅金昌 737100
二礦區是大型下向膠結充填法機械化開采礦山,出礦量已突破 430 萬 t,礦井通風系統采用多級機站進風、地表主扇集中回風的多機站壓抽混合式通風。二礦區通風系統呈對角式結構,系統有 7 個進風區和 2 個回風區。通風區域涉及 5 條豎井,4 個中段,3 個副中段,3 個分段和 1 條主斜坡道。
目前二礦區通風系統設備包括 8 臺 DK40 系列對旋風機,3 套 K45 系列的空氣幕。由于各風機站建設安裝時間跨度大,裝備系統技術水平層次不齊,自動化和信息化程度整體較低。系統主要技術參數沒有集中顯示,只能依靠各風機站崗位人員定時現場巡檢獲得,勞動生產率低;設備檢測手段不完善,系統風壓、風速、電動機電流、電樞溫度和電動機振動等系統重要技術參數缺失;沒有建立系統運行數據庫和故障診斷系統,維修不便;沒有安裝變頻器實現集控,無法在 10 min 內實現系統反風。為了消除系統存在的上述問題,提高系統的自動化和信息化水平,適應大型坑采礦山數字化建設的潮流,筆者采用計算機技術、PLC 技術、變頻技術和網絡技術,對通風系統進行了升級改造,取得了顯著效果。
1 通風系統
二礦區通風系統共有 11 臺主要通風機組,其中8 臺為 DK40 系列對旋通風機,3 臺為 K45 系列的空氣幕。一級風機站 5 個,布置在井下各主要通風平巷內,主要作用為分配風量和增加通風動能;二級風機站 3 個,起引導風流和克服回風側通風阻力的作用;井下 3 組空氣幕,用于局部風流和風量調節,提高通風效果。風機安裝位置如圖 1 所示,各風機參數如表1 所列。
由于是多中段下向膠結充填進路式回采金屬礦山,生產環節多,系統龐大,通風系統服役年限長,各風機站安裝建設時間跨度大,裝備系統技術水平層次不齊,自動化程度低,目前系統主要存在以下問題。
(1)除 850 m 東、西風機站外,其余風機站控制系統均采用傳統的繼電器和接觸器控制方式。這種控制方式落后,設備檢測手段不完善、故障檢測不及時,可靠性差,維護量大,對各風機和主要表征參數無法實現遠程集中控制和監視;系統故障時不能及時發現,維修人員必須到現場進行故障判斷,耗時長,生產影響大。

表1 風機站風機參數Tab.1 Parameters of ventilators in each ventilator station
(2)由于系統沒有實現集控,所有設備均在現場操作,勞動生產率低,風機站分散,距離較遠,協調工作不便,且崗位人員嚴重不足。風機站只能實現定期巡檢,不能實時掌握各風機站運行狀況,系統可靠性差。
(3)1 000 m 以上 TB7 風機站、新 TB8 風機站、1 150 m 管纜井風機站、1 350 m 風機站和 1 000 m 礦石轉運道風機站 5 處風機,由于投入使用年限較長,驅動為非節能型電動機,且電動機溫度、振動等檢測裝置缺失,沒有安裝制動系統。
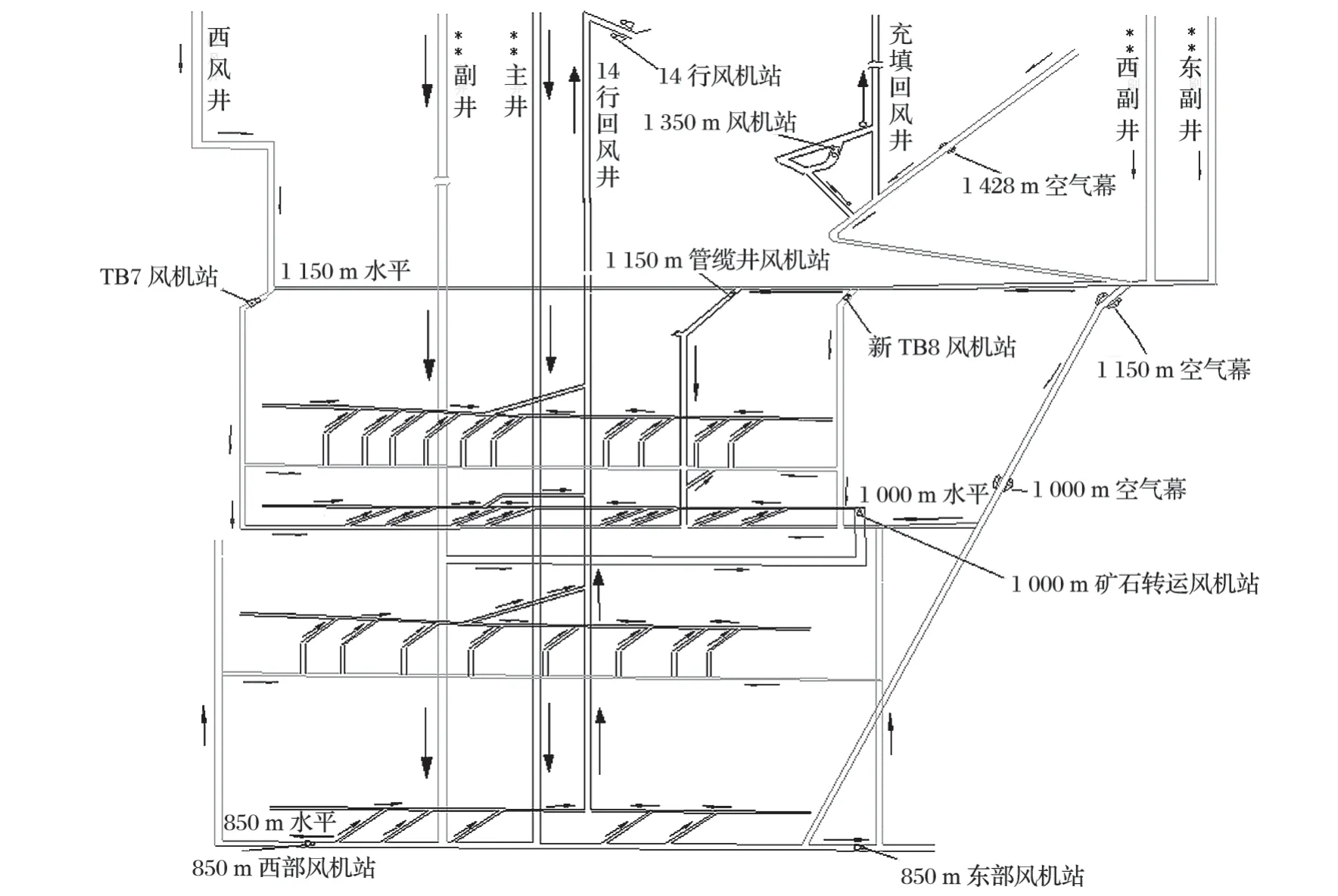
圖1 風機安裝位置示意Fig.1 Sketch of ventilator installation position
(4)根據《金屬非金屬礦山安全規程》(GB l6423—2006)中規定:主扇應有使礦井風流在 10 min 內反向的措施。當利用軸流式風機反轉反風時,其反風量應達到正常運轉時風量的 60% 以上。目前,除 850 m東、西風機站具備反風功能,其他 6 個風機站都無法在規定的時間內實現反風。
2 集控系統改造
考慮到多機站壓抽混合式通風系統的復雜性,改造集控系統采用了 PC+PLC 控制架構[1-3],各風機站 PLC 和上位機屬于控制系統核心設備,集控系統由監控上位機、各風機站 SIMATIC S7-1200 PLC、變頻器、現場傳感器、數據通信網絡等組成。考慮到惡劣的井下環境,系統設置了地表和井下遠程集控、現場 PLC 柜觸摸屏控制和現場手動控制 3 級控制模式。通常情況下,井下操作人員在井下 1 150 m 變電站集控站進行集中控制,地表集控中心輔助監視,各風機站現場無人值守;當井下集控站控制出現問題,不能遠程操作各風機時,通過授權由地表集控室操作控制各風機站設備;系統檢修或故障時,操作人員在各風機站現場通過安裝在 PLC 控制柜上的 TP1200 COMFORT 觸摸屏啟動和控制風機。當 PLC 控制柜和變頻器出現故障無法及時排除時,系統還設計了PLC 和變頻器旁路系統,通過現場手動控制箱和直接啟動柜啟動風機,使風機在短時間內應急運行,滿足生產的需要。上位機 WINCC 系統通過網絡將各風機站 PLC 采集的數據進行分析計算并存儲,對風機運行關鍵參數在線監控,實現 11 臺風機的遠程集中控制。各風機站 PLC 根據上位機指令自動控制系統配套 Siemens 變頻器,風速變送器將風速檢測信號送給 PLC 并與系統給定信號比較,再通過 PLC 內部程序運算后控制變頻器驅動風機電動機按照一定的轉速運轉。但系統受到擾動和環境發生變化時,風速變送器檢測數據發生變化,檢測值被反饋到 PLC 與風速設定信號比較,經 PLC 程序運算后向變頻器輸出轉速控制信號,驅動風機按照系統所需的轉速運行,實現對風機閉環調速,其閉環自動調速控制原理如圖 2所示。現場傳感器對各風機站風壓、風速、振動、電動機軸承溫度、繞組溫度等參數進行采集,將這些信號傳輸至 S7-1200 控制器。變頻器接收 PLC 和上位機發出的風機轉速給定信號、轉向信號、故障復位信號、急停信號等,自動調節控制風機的安全啟、停和調速運行。集控網絡采用拓撲結構,網絡數據通過各風機站現場交換機、環網匯聚交換機和光纖匯聚到礦區千兆光纖環網,地表集控室通過礦區千兆環網交換數據。通風系統集中控制改造方案如圖 3 所示。

圖2 風機閉環調速控制原理Fig.2 Control principle of closed-loop ventilator speed regulation
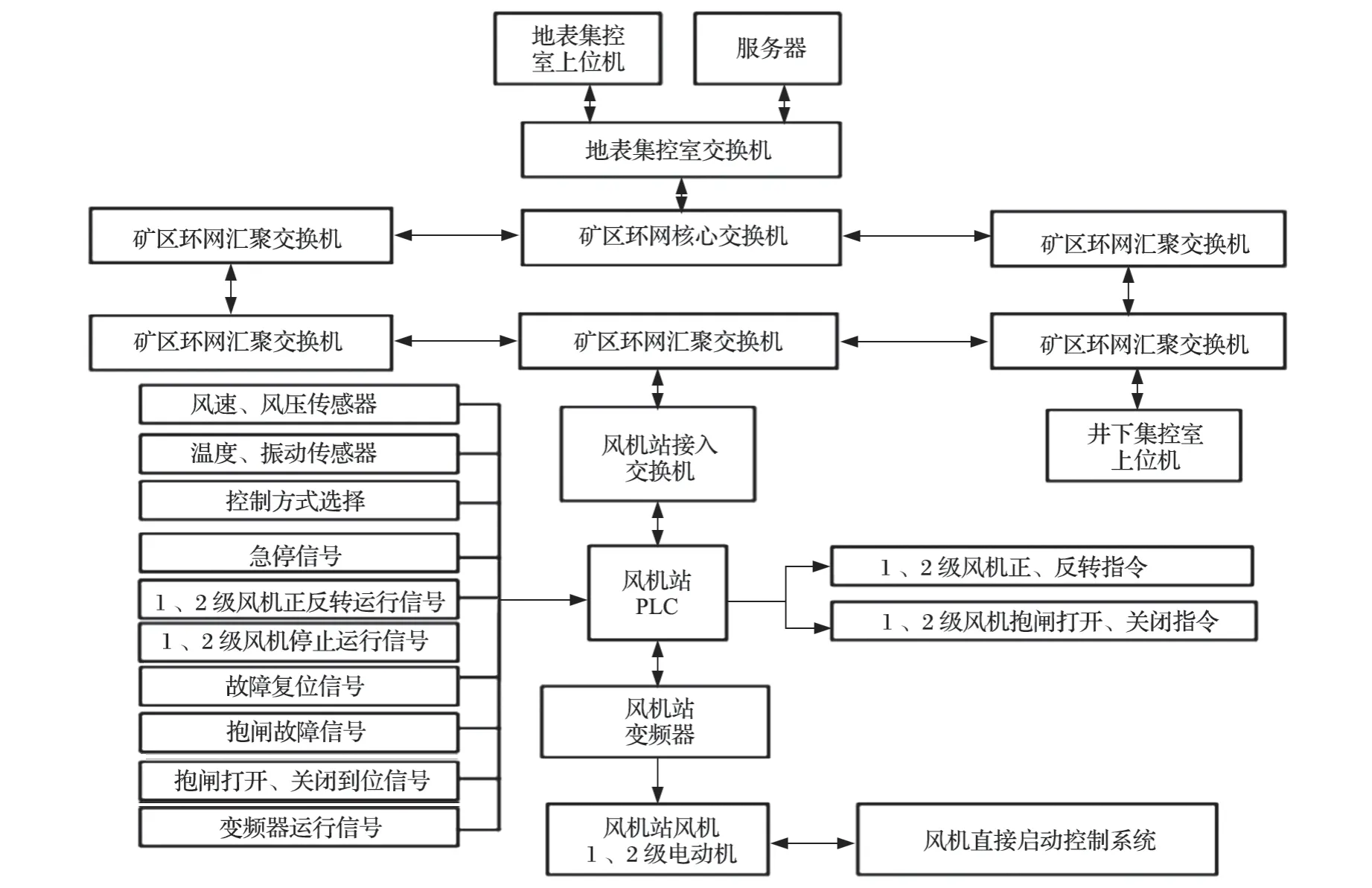
圖3 通風系統集中控制改造方案Fig.3 Reconstruction scheme of ventilation system centralized control
3 集控系統控制單元
3.1 集控網絡架構
集控網絡由 DELL I7-8700 操作員站和工程師站、接入和匯聚交換機、SIMATIC S7-1200 控制器、變頻器、現場傳感器、數據通信網絡等組成。網絡選用了拓撲結構,為了提高信道利用率,通信實時性和網絡可靠性,數據主干網采用了千兆工業以太環網[1],網絡匯聚和接入交換機分別采用了華為 S5700-28P-LI-AC 和東土 Opal10-Ports-PS1-PS2 交換機;各風機站 PLC 通過接入交換機與礦區環網和上位機實現數據交換。PLC 通過 PN 通信協議與安裝在各風機站 PLC 柜上的觸摸屏通信,通過 DP 協議與變頻器通信[4]。礦區通風集控系統網絡架構如圖 4 所示。
3.2 PLC 控制系統
PLC 選用 SIMATIC S7-1200 控制器作為控制核心,主要由電源、CPU、數字量和模擬量 I/O 口、電阻輸入和通信模塊等組成[3]。數字單元主要檢測風機控制方式、風機正反轉、啟停、急停、故障復位、變頻器狀態和抱閘運行情況,并進行信息采集和控制;模擬量處理模塊主要對溫度、壓力和振動等參數進行轉換;通信單元通過工業網口和 DP 通信負責與觸摸屏、上位機和變頻器進行通信[4]。風機站現場傳感器實時采集現場風速、風壓、溫度、振動等信號,并將其轉換為標準信號傳送給 PLC。
3.3 集控系統
集控系統操作簡單,可實現各風機站無人值守模式下的設備集中控制,系統具有如下功能[1]。
(1)在遠程控制模式下,上位機可實現所有風機的啟停、調速和正反轉操作,并顯示各類參數、參數曲線、故障報警及歸檔。
(2)通過各風機站 PLC 控制站觸摸屏,可單獨對風機進行啟停、調速和正反轉操作。
(3)風機發生故障時,可在集控室或現場停用故障風機,而不影響其他站點風機的正常運行。
(4)實時檢測各風機站風量和風速。
(5)實時監測每臺風機的電氣參數。
(6)實時監測風機驅動電動機的軸承溫度、電樞溫度和振動。
(7)實時監測風機電動機轉速。
(8)實時模擬通風機通風系統狀態圖。
(9)查看風量、風壓、溫度、振動和電流等參數的實時運行曲線及歷史記錄。
(10)在監控系統中,可進行系統功能組態、監視報警、控制參數在線修改和調整,同下位機進行傳輸、通信,采集各設備與儀表的運行狀態、各工藝參數,并進行匯總、處理、報警和故障分析。
(11)具有用戶權限管理功能,根據權限分別授予操作權限和系統參數修改及程序修訂權限。
3.4 集控系統軟件設計
3.4.1 PLC 軟件設計

圖4 礦區通風集中控制系統網絡架構Fig.4 Ethernet architecture of ventilation centralized control system in mining area
軟件編程選用了與 S7-1200 編程器相配套的Siemens 博途 V14[3]。各風機站的啟停控制有遠程操作、現場觸摸屏操作和現場控制箱操作 3 種方式。遠程集中控制由工控機向 PLC 發出啟動指令,由 PLC根據邏輯控制程序實現風機的自動保護和啟動;現場集中控制由操作人員在各風機站 PLC 控制柜 TP1200 COMFORT 觸摸屏發出啟動指令,PLC 根據邏輯控制程序實現風機的自動保護和啟動;選擇現場手動操作時,PLC 的各項控制、保護和檢測功能均被旁路,由操作人員通過風機控制箱啟停風機。單臺風機運程控制流程如圖 5 所示。
3.4.2 上位機組態軟件設計
集控系統組態軟件選用 Siemens 公司的 SIMATIC WinCC V7.4[3]。該軟件的主要子系統有圖形系統、報警信息系統、變量存檔、報表系統、數據處理和通信系統[5]等組成。通過上位機組態、過程邏輯組態、數據備份/分析、網絡通信組態、系統調試/診斷功能、管理層分析/決策功能,集控系統實現了遠程監控上位機,實時對各風機站進行數據采集、分析處理、實時控制、統計存儲、故障報警、查詢打印和遠程傳輸等任務,并可在集控室主機及大屏幕上顯示各風機站風機狀態動、靜態圖形、數據、曲線、通風系統示意圖、模擬量配置圖等[6]。通過用戶權限管理功能,使用密碼設置權限等級,在線調整通風系統各風機站通風系統控制參數和控制功能,極大地方便了系統維護和分級管理。14 行風機站控制系統主控畫面如圖 6 所示。

圖5 單臺風機遠程控制流程Fig.5 Process flow of remote control for single ventilator
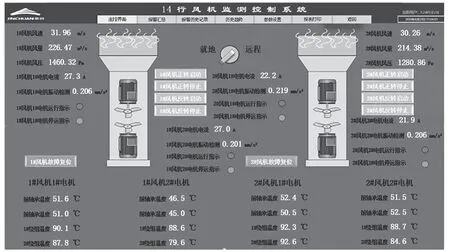
圖6 14 行風機站監控系統主控界面Fig.6 Main control interface of monitoring system for 14-lined ventilation station
4 結語
基于 PLC 控制技術、計算機技術和光纖以太環網的風機集控系統,實現了全礦區 11 臺主要通風機站的遠程集中控制和統一管理,在保證控制系統可靠性的前提下,延伸了管理觸角,降低了運行維護成本,減少了現場崗位操作人員,提高了維護人員對系統突發事件的應急能力。通過技術改造,降低了能源消耗,實現了風機的快速正、反轉切換控制,滿足了《金屬非金屬礦山安全規程》對通風系統反風的要求,集控系統的自動化、信息化水平顯著提升,也為開展“自動化、智能化”礦山建設進行了有益的嘗試和探索。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
汽車維修與保養(2019年7期)2020-01-06 03:30:42
測控技術(2018年5期)2018-12-09 09:04:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
