在車輛重量計算中補償車身側傾的方法
2020-12-24 12:42:49李華
裝備維修技術 2020年16期
李華

摘要:當車輛不對稱地裝載時,如車輛的駕駛員和乘客側的重量不相等時,可能會發生側傾,車身側傾將導致沿每個軸的懸架撓度和行駛高度變化,從而導致底盤不再與地面平行,影響汽車操縱的穩定性和乘客乘坐的舒適度。本文通過使用支撐桿和懸架的特性來調整重量測量值以計算側傾角,從而補償了支撐桿的影響,并使用實心軸的特性和傳感器測量值來調整重量測量值,從而補償了實心軸的影響。其中,車輛傳感器數據用于計算車身側傾,將身體側傾與動態計算的側傾閾值進行比較,如果車身側傾超過側傾閾值,則確定重量調整。
關鍵詞:車身,側傾,傳感器,重量調整
1、引言
車身側傾是制約汽車操縱穩定性和乘坐舒適度的重要因素[ ]。懸架作為車身的重要組成部分,是連接車身與車輪所有零部件的總稱,懸架傳遞著車輪與車身之間所有的力與力矩,隔絕和衰減路面振動對車身的影響。提高乘坐舒適性,同時懸架需要使車輪具有良好的抓地性能,保證車輛行駛的安全性[ ]。懸架側傾角剛度的大小對車身的側傾角有影響[ ],若側傾角剛度過小,則側墻角過大,導致乘員缺乏舒適感和安全感;反之,將會導致成員缺乏汽車側翻時的感覺,并且如果汽車后輪的側傾角剛度過大,則會使汽車增加過多轉向的可能[ ]。
人們對高性能汽車懸架的要求和科學技術的進步使汽車懸架技術也從單一的被動減震模式向主動和半主動減震模式發展[ ],主動懸架或半主動懸架在其控制器的控制下,能更好的隔絕路面振動,增強路面的抓地力,在提高車輛乘坐的舒適性同時,保證車輛行駛的安全性。基于整車模型的主動懸架控制需要考慮多個懸架協調控制,其對車輛的舒適性控制也從單一的垂向運動抑制變為垂向、俯仰與側傾多個方向運動的聯合抑制[ ][ ]。車輛轉向側傾的主動轉向控制是根據車輛當前的行駛速度,限制車輛轉向角的大小,保證車輛轉向時的側傾運動在安全范圍內,并建立車輛轉向側傾模型,分析車輛轉向時的側傾動力學特性,設定了車輛的側傾的門限值,當預測到車輛的側傾運動要超過門限制時,通過主動轉向系統附加一個轉角,減小車輛總的轉向角,使車輛處于安全行駛狀態[ - ]。主動懸架或半主動懸架控制車輛轉向側傾運動時根據車輛轉向時的狀態計算出車輛車身的側傾力矩,然后控制主動懸架或半主動懸架產生反側傾力矩,使車身保持平穩[ - ],通過側傾力矩分配來控制車輛轉向,使車輛處于轉向不足,從而保證車輛不側翻。
本文研究了一種在計算車輛的重量時補償車身側傾的方法,該方法通過從車輛的傳感器接收傳感器數據并基于傳感器數據確定車輛的重量和車輛的車身側傾,然后將車身側傾與閾值進行比較,如果滿足側傾閾值,則基于確定的車身側傾和車輛懸架系統的特性來調整車輛的確定重量,如果不滿足側傾閾值,則不需要重量調整。
2、車輛重量計算中補償車身側傾方法
對于使用行駛高度傳感器的車輛重量計算系統,由于力是通過力拉桿傳遞的,而不是通過其他懸架元件傳遞,因此拉力桿的測量結果可能導致重量測量不準確。另外,對于包括實心軸的車輛,力可能通過實心軸傳遞,從而在重量計算中產生誤差。本文研究了一種在車輛重量計算中補償車身側傾的方法和設備。該方法通過使用支撐桿和懸架的特性來調整重量測量值以計算側傾角,從而補償了支撐桿的影響,并通過使用實心軸的特性和傳感器測量值來調整重量測量值,從而補償了實心軸的影響。其中,車輛傳感器數據用于計算身體側傾,將身體側傾與動態計算的側傾閾值進行比較,如果身體側傾超過側傾閾值,則確定重量調整。該方法的具體研究內容如下。
圖1為車輛重量計算系統框圖,該重量計算系統包括傳感器,重量確定器,側傾補償器和車輛系統接口。重量計算系統輸出校正車輛重量,重量計算系統可以在車輛的動力總成控制單元(PCU)中實現。
該系統中傳感器將傳感器數據輸出到重量確定器和側傾補償器,重量計算系統經由車輛的控制器局域網(CAN)系統與傳感器通信。車輛CAN系統允許重量計算系統與具有主機的傳感器通信,傳感器可以通過任何合適的方式與重量計算系統通信。重量確定器使用從傳感器接收的數據來計算車輛重量,例如,重量確定器使用懸架的性質(例如,彈簧剛度)來計算車輛的每個車輪上的負載,并且將每個確定的負載求和以確定總負載。當計算車輛的總重量時,側傾補償器補償車輛的體側傾,側傾補償器可以計算校正因子以調節權重確定器,校正因子可以用于將由重量確定器計算出的重量調整為校正后的車輛重量。
車輛系統接口允許重量確定器和側傾補償器與車輛的其他系統對接,車輛系統界面可以使用校正后的車輛重量來修改車輛的系統以解決車輛的重量并可以修改車輛的動力轉向系統。車輛系統接口也可以與輸出設備連接以向用戶警告校正后的重量。
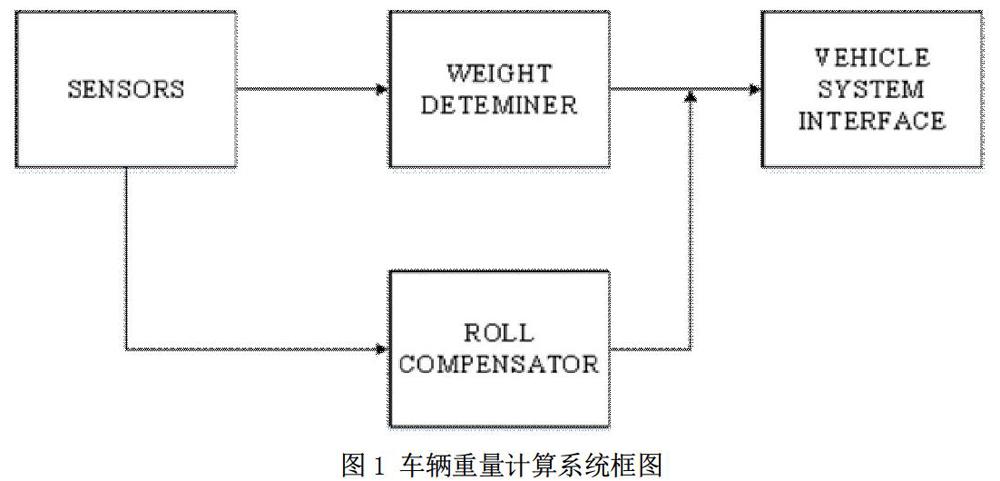
圖2為傾側補償器框圖,包括傳感器輸入,側傾計算器,側傾閾值比較器,重量調節器,閾值確定器,力角特性確定器,行駛高度傳感器,傾斜傳感器,加速度計,拉桿應變儀和其他傳感器。
其中行駛高度傳感器測量與車輛的每個車輪相關聯的行駛高度以及車輛懸架系統的每個懸架元件的偏轉。傾斜傳感器測量車輛的傾斜。加速度計測量車輛相對于地球重力矢量的傾斜加速度計輸出的大小與該加速度計的身體側傾的正弦成比例。拉桿應變儀測量拉桿中的應變。傳感器輸入,用于從車輛的傳感器接收傳感器數據,指示相關的傳感器值。側傾計算器使用傳感器輸入提供的傳感器數據來計算車輛的側傾角(車身側傾)。側傾閾值比較器將側傾計算器計算出的側傾角與閾值確定器確定的閾值進行比較,以確定側傾角是否滿足閾值。重量調節器可以使用由力角特性確定器確定的力角特性計算權重調整因子,懸架力角特性由力角特性確定器確定。閾值確定器確定滾動閾值比較器要使用的合適閾值,側傾閾值可以是與車輛的構造,模型和或懸架系統相關聯的靜態值,側傾閾值可以通過實驗確定,也可以基于憑經驗確定的車輛懸架系統的特性來確定動態側傾閾值。因為車輛的懸架系統會隨著年齡而磨損,如懸架或拉桿的剛度由于磨損而減小,閾值確定器可以適當地修改側傾閾值。力角特性確定器確定由重量調節器518使用的懸架力角特性,力角特性可以基于車輛的制造,模型或懸架系統來確定,也可以基于實驗數據來確定,當車輛的懸架系統隨著年齡而磨損時,力角特性確定器可以適當地修改力角特性。
圖3 為車輛重量確定中補償非對稱負載的方法流程圖,傳感器輸入從車輛的傳感器接收傳感器數據,在已經接收和計算了所有傳感器數據之后,側傾計算器然后可以使用三角關系來確定車輛的體側傾。一旦已經計算出身體側傾,則閾值確定器確定與車輛相關聯的側傾閾值,傾側閾值可以基于車輛的制造、模型和懸掛系統來確定,也可以根據實驗來確定,傾側閾值有時也是根據懸掛系統的壽命。環境條件等動態變化的。一旦確定了側傾閾值,則側傾閾值比較器確定車輛閾值是否滿足側傾閾值,如果滿足側傾閾值,則需要進行重量調整,如果不滿足側傾閾值,則不需要重量調整。
3、車輛重量計算中補償車身側傾方法處理器平臺
圖4為實現本論文所提出方法的處理器平臺框圖,該處理器平臺可以通過服務器,個人計算機,工作站,自學習機器,移動設備(例如,手機,智能電話,平板電腦等)或任何其他類型的計算設備實現。該處理器平臺由硬件處理器,總線,易失性存儲器,非易失性存儲器,接口電路,輸入設備,輸出設備,用于存儲軟件和/或數據的大容量存儲設備,可執行指令以及網絡設備等組成。
此平臺的硬件處理器由集成電路,邏輯電路,微處理器,GPU,DSP或控制器來實現,處理器經由總線與包括易失性存儲器和非易失性存儲器的主存儲器通信。易失性存儲器可以由同步動態隨機存取存儲器(SDRAM),動態隨機存取存儲器(DRAM)或任何其他類型的隨機存取存儲器設備來實現。非易失性存儲器可以由閃存或其他存儲設備來實,訪問主存儲器是由存儲器控制器控制。接口電路可以通過任何類型的接口標準來實現,例如以太網接口,通用串行總線(USB),Bluetooth?接口,近場通信(NFC)接口或PCI Express接口。輸入設備連接到接口電路,輸入設備允許用戶將數據或命令輸入到處理器中。輸出設備也連接到接口電路。接口電路通常包括圖形驅動器卡,圖形驅動器芯片或圖形驅動器處理器,還包括通信設備,例如發射機,接收機,收發器,調制解調器,住宅網關,無線接入點或網絡接口,以促進與外部機器的數據交換。大容量存儲設備包括軟盤驅動器,硬盤驅動器,光盤驅動器,藍光磁盤驅動器,獨立磁盤冗余陣列(RAID)系統和數字多功能磁盤(DVD)驅動器。機器可執行指令用來實現圖3的方法流程。
上述的傳感器輸入,側傾計算器,側傾閾值比較器,重量調節器,閾值確定器以及力角特性確定器等均在此平臺上實現。
4、結論
本文提出了一種在計算車輛的重量時補償車身側傾的方法,該方法通過從車輛的傳感器接收傳感器數據并基于傳感器數據確定車輛的重量和車輛的車身側傾,然后將車身側傾與閾值進行比較,如果滿足側傾閾值,則基于確定的車身側傾和車輛懸架系統的特性來調整車輛的確定重量,如果不滿足側傾閾值,則不需要重量調整。該方法在使用現有傳感器的重量計算中考慮了車身側傾,正確補償車身側傾,可以更準確地確定車輛的重量,從而可以更準確地確定零件壽命。
參考文獻
[1 ] 余志生. 汽車理論(第3版)[M]. 2000.
[ 2] 馬寧, 李長明. 汽車懸架發展概述[J]. 科技資訊, 2007(34):221-221.
[ 3] 王仲宜, 廖美穎, 谷玉川, et al. 汽車車身側傾控制方法研究[J]. 機電工程技(7):124-127.
[ 4] 約森·賴姆佩爾.王誼譯.懸架原件及地盤力學[M].長春:吉林科學技術出版社,1992.
[ 5] 陳相甫. 汽車主動懸架系統的俯仰與側傾控制方法研究[D].
[ 6] Zhang Y , Alleyne A G . A new approach to half-car active suspension control[C]// American Control Conference. IEEE, 2003.
[ 7] Qamar S , Khan T , Khan L . Adaptive Neuro-Fuzzy Sliding Mode Control Based Strategy For Active Suspension Control[C]// Frontiers of Information Technology (FIT), 2012 10th International Conference on. IEEE, 2012.
[ 8] Johansson B , Gafvert M . Untripped SUV rollover detection and prevention[C]// Decision and Control, 2004. CDC. 43rd IEEE Conference on. IEEE, 2005.
[ 9] Ackermann J , Odenthal D . Damping of vehicle roll dynamics by gain scheduled active steering[C]// Ecc99, Karlsruhe, Germany. IEEE, 2000.
[ 10] Islam M M , Ha C . Road vehicle rollover avoidance using active steering controller[C]// International Conference on Computer & Information Technology. IEEE, 2012.
[ 11] Binder M K , Khajepour A . Optimal control allocation for coordinated suspension control[C]// American Control Conference-acc. IEEE, 2014.
[ 12] Zhu Q , Ayalew B . Predictive roll, handling and ride control of vehicles via active suspensions[C]// American Control Conference-acc. IEEE, 2014.
[ 13] Yoon J , Cho W , Koo B , et al. Unified Chassis Control for Rollover Prevention and Lateral Stability[J]. IEEE Transactions on Vehicular Technology, 2009, 58(2):596-609.