不確定性輸送用混聯(lián)機器人滑模控制研究
2020-12-25 06:10:20張松云高國琴
計算機技術(shù)與發(fā)展 2020年12期
關(guān)鍵詞:設(shè)計
張松云,高國琴
(江蘇大學(xué) 電氣信息工程學(xué)院,江蘇 鎮(zhèn)江 212013)
0 引 言
混聯(lián)機器人合理結(jié)合并、串聯(lián)機構(gòu),兼具并聯(lián)機構(gòu)柔性化水平高、承載能力強以及串聯(lián)機構(gòu)運動靈活、工作空間大的優(yōu)點[1]。針對現(xiàn)有汽車涂裝輸送設(shè)備因采用懸臂梁串聯(lián)結(jié)構(gòu)而存在承載能力低及柔性化水平不高的問題,本課題自行研制了一種輸送用混聯(lián)機器人[2]。在運行過程中,輸送用混聯(lián)機器人控制系統(tǒng)存在如建模誤差、摩擦力和外界干擾等諸多的不確定性,嚴重影響系統(tǒng)的控制性能[3]。
滑模控制動態(tài)性能好、響應(yīng)速度快,可以在一定程度上解決混聯(lián)機器人控制系統(tǒng)中存在的不確定性問題。但由于實際系統(tǒng)中不確定性上界信息難以獲取,滑模控制需保守選取大切換增益以確保混聯(lián)機器人系統(tǒng)對不確定性的魯棒性[4],此時控制律的不連續(xù)會給控制系統(tǒng)帶來嚴重的抖振問題,致使機械部件疲勞,嚴重時甚至能在短時間內(nèi)破壞系統(tǒng)[5-6]。相對于其他高階滑模,超螺旋滑模控制[7]具有一定的抑制抖振作用且所需信息量少,但超螺旋滑模控制律中仍存在不連續(xù)項[8-9]。為此,可通過設(shè)計其切換增益自適應(yīng)律,以削弱增益選取的保守性,從而進一步抑制抖振[10]。
現(xiàn)常用的滑模控制自適應(yīng)律是根據(jù)滑模變量大小調(diào)整切換增益進行設(shè)計的[3-4,11],但由于該種自適應(yīng)設(shè)計方法無法實時較準確地應(yīng)對控制系統(tǒng)中不確定性上界的變化,故仍可能存在切換增益過高選取的問題。文獻[12]針對二維簡單非線性系統(tǒng)提出了另一種自適應(yīng)律設(shè)計方法,該方法基于包含不確定項的超螺旋滑模,通過結(jié)合等效控制原理估計不確定項值,并根據(jù)該估計值設(shè)計自適應(yīng)律,以獲取盡可能小的切換增益。但該自適應(yīng)律未能實現(xiàn)滑模切換增益調(diào)整速度的自適應(yīng),在不確定性變化速度較快時,切換增益無法快速調(diào)整至最小。為此,針對不確定性輸送用混聯(lián)機器人,基于建立的動力學(xué)模型,將控制系統(tǒng)中的不確定性引入超螺旋滑模控制律中,并基于文獻[12]的自適應(yīng)設(shè)計方法,實時獲取控制系統(tǒng)中的不確定性的上界信息,構(gòu)建一種雙重自適應(yīng)超螺旋滑模,以在時變不確定性上界信息未知條件下快速獲取盡可能小的切換增益,從而最大限度地抑制滑模控制抖振,提高混聯(lián)機器人系統(tǒng)的魯棒性能。此外,考慮到滑模控制趨近階段滑模變量遠離滑模面,該文結(jié)合全局滑模[13]改進滑模面,以解決滑模控制趨近階段不滿足等效控制條件的問題,確保雙重自適應(yīng)超螺旋滑模控制方法的實施并最終實現(xiàn)混聯(lián)機器人的高性能控制[14]。最后,理論證明所提方法的穩(wěn)定性并基于MATLAB仿真實驗分析,驗證該算法的有效性和優(yōu)越性。
1 動力學(xué)建模
本課題組研制的汽車電泳涂裝輸送用混聯(lián)機器人結(jié)構(gòu)如圖1所示。該輸送用混聯(lián)機器人是一個中間以連接桿連接的雙邊對稱結(jié)構(gòu),主要由升降翻轉(zhuǎn)機構(gòu)和行走機構(gòu)兩個相互獨立的部分組成,分別實現(xiàn)機器人的升降翻轉(zhuǎn)及進退功能。其中,作為機器人的主體部分,升降翻轉(zhuǎn)機構(gòu)的控制要求較高,故該文主要研究該不確定性輸送用混聯(lián)機器人升降翻轉(zhuǎn)機構(gòu)的控制問題。選取連接桿中點位姿參數(shù)q=(z,β)T作為廣義坐標,其中,z為連接桿中點在Z軸方向上的位移,β為連接桿中點繞Y軸逆時針旋轉(zhuǎn)的角度。采用拉格朗日法建立輸送用混聯(lián)機器人的標準動力學(xué)模型[5]為:

(1)

考慮系統(tǒng)中存在的不確定性,則不確定性輸送用混聯(lián)機器人動力學(xué)模型可表示為:
(2)

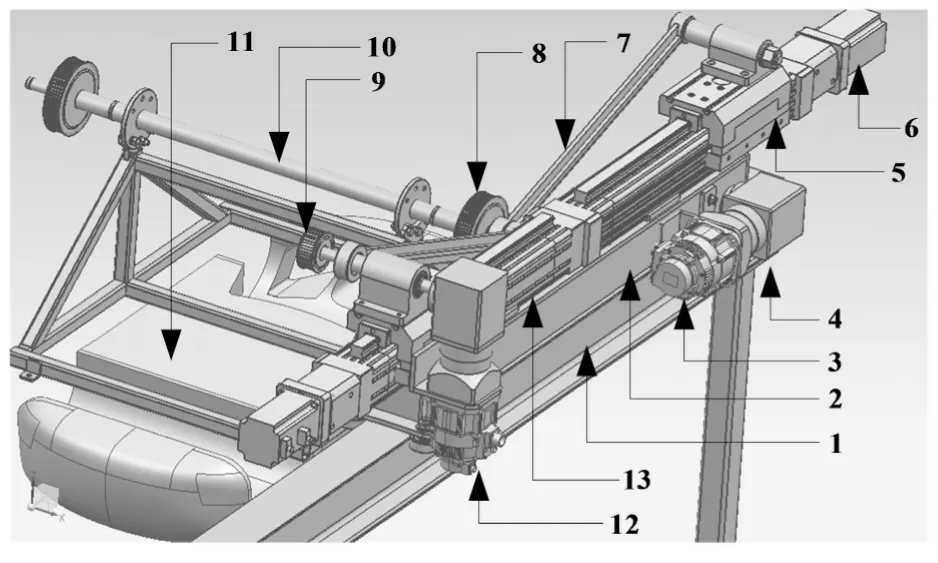
1.導(dǎo)軌 2.底座 3.行走驅(qū)動電機 4.減速機 5.移動滑塊 6.升降驅(qū)動電機 7.連桿 8.從動輪 9.主動輪 10.連接桿11.車體12.翻轉(zhuǎn)驅(qū)動電機 13.電動絲杠
2 控制器設(shè)計
2.1 滑模控制
結(jié)合全局滑模定義滑模面為:
s=w(t)-e-λtw(0)
(3)

由式(2)不確定性輸送用混聯(lián)機器人動力學(xué)模型可得:
(4)
對式(3)s求導(dǎo),并將式(4)代入可得:
(5)
超螺旋滑模控制律定義為:
(6)

則由式(5)、(6)可得不確定性輸送用混聯(lián)機器人滑模控制律為:
(7)
注1:式(7)所示的滑模控制律存在未知項τd,無法應(yīng)用于控制器。為解決該問題,該文基于該滑模控制律研究其切換增益自適應(yīng)律。

2.2 自適應(yīng)律設(shè)計
首先將輸送用混聯(lián)機器人控制系統(tǒng)中的不確定性引入超螺旋滑模控制律中。由標準動力學(xué)模型式(1)、滑模面式(3)以及超螺旋滑模控制律式(6)可得基于標準動力學(xué)模型的滑模控制律,將其代入式(5)中,可得:
(8)

(9)

(10)
注2:切換增益α(t)、η(t)與L(t)滿足:
(11)
η(t)=L(t)η0
(12)

接著,該文結(jié)合等效控制原理設(shè)計自適應(yīng)律。
由式(9)可得:
η(t)sgn(s)|eq=f(t)
(13)

(14)
式中,τ為濾波器時間常數(shù),其值越小,不確定項的等效值估計越準確。
定義變量δ(t)=diag[δ1(t),δ2(t)]為:
(15)

針對時變增益L(t)設(shè)計自適應(yīng)律為:
L(t)=l0+l(t)
(16)

(17)
ρ(t)=r0+r(t)
(18)
(19)

注4:在自適應(yīng)律中,式(16)根據(jù)δ(t)符號即切換項與不確定項間的大小,調(diào)整切換增益的變化方向,確保了不確定性輸送用混聯(lián)機器人控制系統(tǒng)的魯棒性;式(18)根據(jù)δ(t)大小即切換項與不確定項間的誤差大小,調(diào)整切換增益變化速度,實現(xiàn)了切換增益的快速自適應(yīng)以抑制滑模控制抖振。
綜上,所設(shè)計不確定性輸送用混聯(lián)機器人滑模控制系統(tǒng)框圖如圖2所示。圖中,qd為末端期望位姿;x=[x1,x2,…,x6]T為主動關(guān)節(jié)實際位置;q為x經(jīng)運動學(xué)正解轉(zhuǎn)換得到的混聯(lián)機器人末端實際位姿;e為混聯(lián)機器人末端位姿跟蹤誤差;s為滑模變量;u為控制器輸出;τ=[τ1,τ2,…,τn]T為混聯(lián)機器人主動關(guān)節(jié)控制輸入;α和η為切換增益。
2.3 穩(wěn)定性分析
假設(shè)1:不確定項f(t)滿足約束條件:
|fi(t)|≤a0i<+∞,i=1,2
(20)
(21)
式中,a0=[a01,a02]T,a1=[a11,a12]T未知。
定理:針對不確定性輸送用混聯(lián)機器人控制系統(tǒng),設(shè)計滑模控制算法如式(10)所示,自適應(yīng)律如式(16)~(19)所示,則系統(tǒng)有限時間收斂。
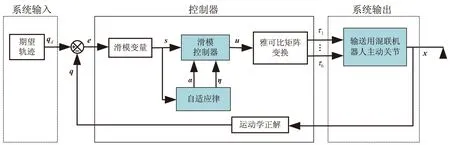
圖2 不確定性輸送用混聯(lián)機器人滑模控制系統(tǒng)框圖
證明:首先對式(9)所示的超螺旋滑模進行穩(wěn)定性分析。
引入新的狀態(tài)變量:
(22)
并將其代入式(9),則超螺旋滑模可改寫為:
(23)

(24)
下證所設(shè)計自適應(yīng)律可以在有限時間內(nèi)確保Li(t)>|fi(t)|成立。
定義新變量φ(t)=[φ1(t),φ2(t)]T為:
(25)
并將式(15)改寫為:

(26)
定義Lyapunov函數(shù)為:
(27)
對式(27)求導(dǎo),并根據(jù)式(15)~(19)可知:
(28)
(29)

根據(jù)上述證明可知系統(tǒng)有限時間收斂。證畢。
3 仿真實驗結(jié)果分析
為驗證所提算法的有效性和優(yōu)越性,基于MATLAB仿真,將所提不確定性輸送用混聯(lián)機器人滑模控制算法(NASTW)與未采用全局滑模面的自適應(yīng)超螺旋滑模(STW)和基于滑模變量的自適應(yīng)超螺旋滑模(SMASTW)作對比。將連接桿中點的廣義驅(qū)動力或驅(qū)動力矩轉(zhuǎn)換為關(guān)節(jié)驅(qū)動力或驅(qū)動力矩,以便實現(xiàn)對不確定性輸送用混聯(lián)機器人的實際控制。基于此,首先通過解析法求得升降翻轉(zhuǎn)機構(gòu)運動學(xué)逆解,并將運動學(xué)逆解方程兩端對時間求導(dǎo),以求得的雅可比矩陣J。通過式(30)實現(xiàn)廣義驅(qū)動力或驅(qū)動力矩到關(guān)節(jié)驅(qū)動力或驅(qū)動力矩的轉(zhuǎn)換。
τ=JTU
(30)
式中,U為關(guān)節(jié)驅(qū)動力或驅(qū)動力矩。
根據(jù)樣機參數(shù)和工藝要求,確定混聯(lián)機器人末端即連接桿中點的期望運動軌跡:
z=

β=


(a)z方向跟蹤誤差 (b)β角度跟蹤誤差
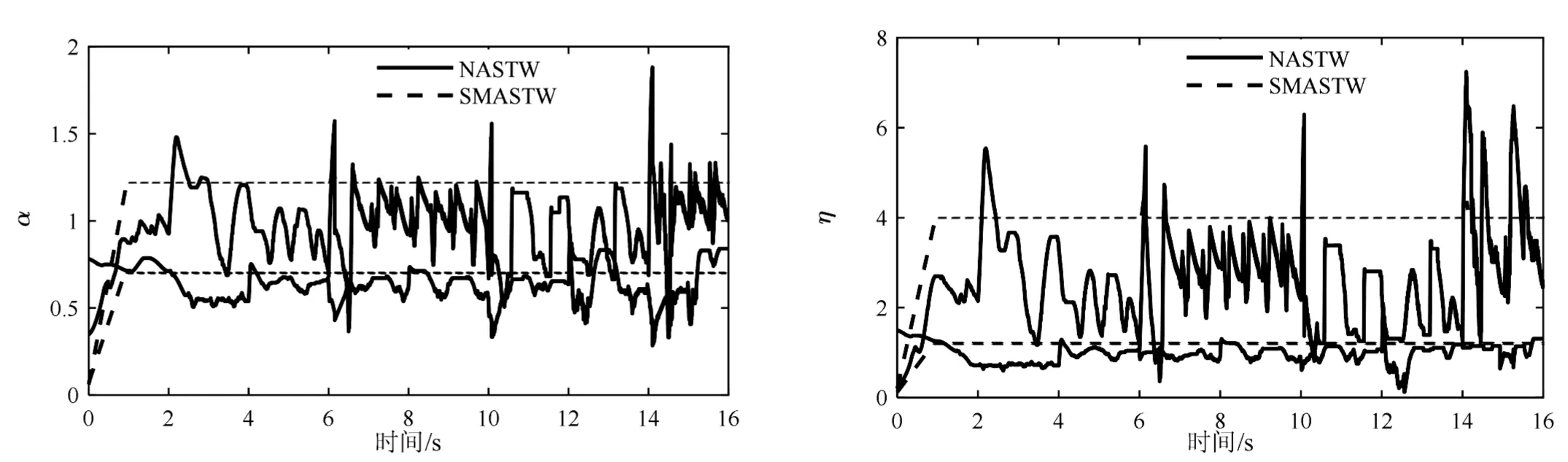
(a)切換增益α (b)切換增益η
注5:輸送用混聯(lián)機器人是一個雙邊對稱結(jié)構(gòu),兩邊對應(yīng)關(guān)節(jié)運動一致,故僅給出升降翻轉(zhuǎn)機構(gòu)單邊主動關(guān)節(jié)控制輸入變化曲線。

由圖3~圖5分析可知:(1)SMASTW和NASTW均具有較好的軌跡跟蹤精度,且該文所提算法跟蹤精度優(yōu)于SMASTW,其中,連接桿中點位姿跟蹤均方誤差分別為7.36×10-5和2.65×10-5;(2)在不確定項大于切換項時,NASTW控制中的切換項可以自適應(yīng)不確定項,且NASTW中的滑模控制切換增益普遍小于SMASTW的切換增益;(3)與SMASTW相比,所提出GNASTW系統(tǒng)中單邊升降翻轉(zhuǎn)機構(gòu)三個主動關(guān)節(jié)的控制輸入最大抖振幅度很小,分別降低了97.7%,97.7%和98.1%。這是由于所設(shè)計的NASTW中的自適應(yīng)律能根據(jù)切換項與實時估計的不確定項間的大小及其差值實時調(diào)整切換增益的調(diào)整方向和速度,在確保混聯(lián)機器人控制系統(tǒng)魯棒性的同時,實現(xiàn)了滑模控制低切換增益的快速自適應(yīng),因此,NASTW系統(tǒng)具有較好的魯棒性能。
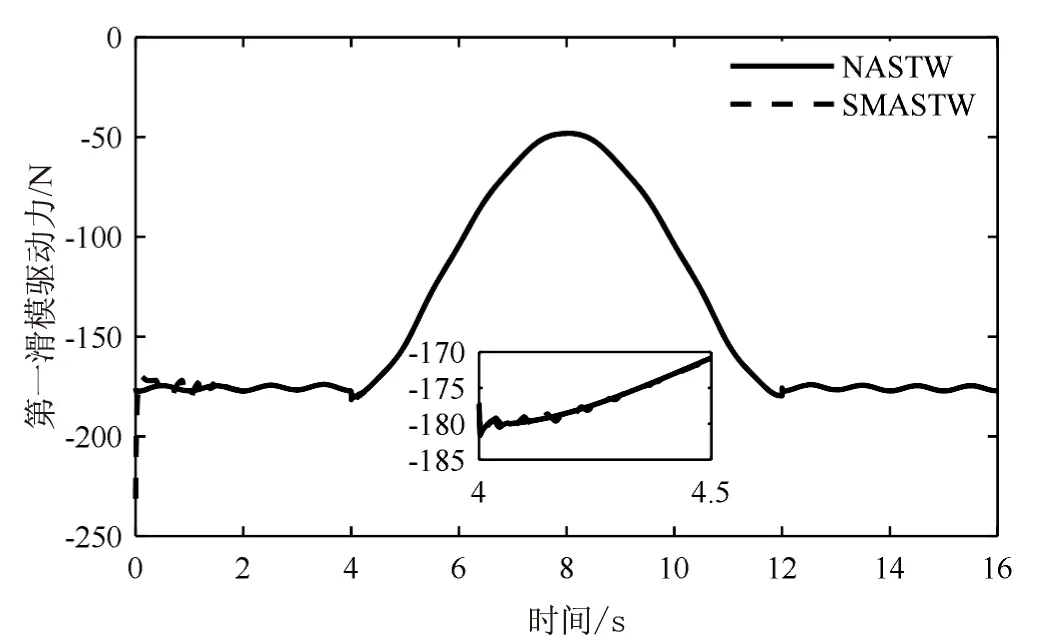
(a)第一滑塊驅(qū)動力

(b)第二滑塊驅(qū)動力
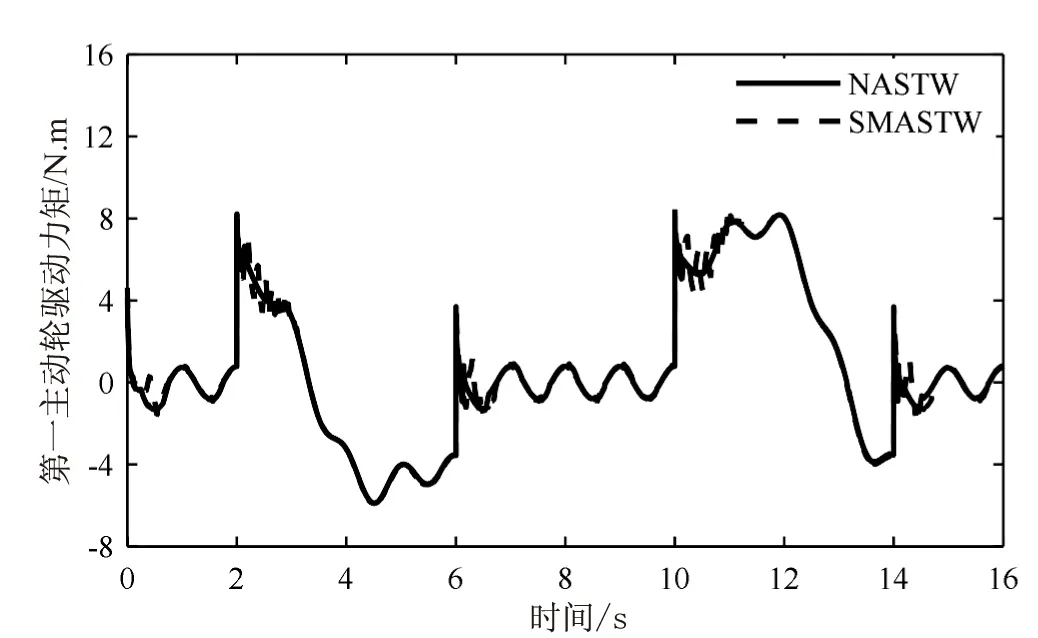
(c)第一主動關(guān)節(jié)驅(qū)動力矩
綜上,該文提出的不確定性輸送用混聯(lián)機器人滑模控制方法具有較好的魯棒性能,在確保系統(tǒng)全局魯棒性、提高軌跡跟蹤性能的同時,可大幅度減小滑模控制抖振。
4 結(jié)束語
針對不確定性輸送用混聯(lián)機器人提出一種滑模控制方法以實現(xiàn)其高性能控制,主要貢獻為:
(1)將全局滑模與超螺旋滑模控制相結(jié)合設(shè)計滑模面,消除滑模控制趨近階段,解決了趨近階段不滿足等效控制條件的問題,同時,確保了控制系統(tǒng)的全局魯棒性;
(2)結(jié)合不確定性輸送用混聯(lián)機器人動力學(xué)模型和超螺旋滑模以獲得包含不確定性的超螺旋滑模控制律,并基于等效控制原理設(shè)計超螺旋滑模切換增益雙重自適應(yīng)律,構(gòu)建自適應(yīng)超螺旋滑模控制器,最大限度地減小因滑模控制切換增益保守選取而帶來的抖振問題;
(3)基于MATLAB仿真,將所提出的滑模控制算法與未采用全局滑模面的自適應(yīng)超螺旋滑模控制、基于滑模變量的自適應(yīng)超螺旋滑模控制相比,仿真結(jié)果證明了所提出控制方法的有效性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04