基于PIX4D mapper的空中三角測量分層問題的研究
2020-12-25 15:14:34
世界有色金屬 2020年19期
(甘肅省地質礦產勘查開發局第三地質礦產勘查院,甘肅 蘭州 730050)
隨著無人機技術越來越成熟,搭載的設備越來越先進,無人機航空攝影技術逐漸成為主要的航空攝影技術之一。獲得無人機航拍影像后,需要對影像進行后處理,便于之后的影像解譯與分析,如何能提高影像處理的速度與質量就顯得尤為重要。Pix4D mapper軟件是由瑞士Pix4D公司研發的一款集全自動、快速、滿足專業精度為一體的無人機數據和航空影像處理軟件[1]。其優勢主要體現在:無需人為干預即可獲得專業的精度,具有完善的工作流,能夠自動獲取相機參數、自動生成精度報告等。
1 影像處理原理
利用連續且有一定航向重疊度和旁向重疊度的原始航飛照片,并制作少量野外控制點,在室內運用相關處理軟件匹配大量同名點,從而得到DOM數據和DSM數據。利用飛機自帶POS數據得到相對定向數據,再結合控制點得到絕對定向數據,并以此為基礎得到滿足要求的坐標數據。
2 PIX4D mapper軟件處理流程
利用Pix4D mapper軟件對航測相機獲取的原始影像數據進行處理,可以生成DOM和DEM等成果產品,具體處理流程如下:
(1)航片整理,POS數據整理;照片如果寫入了POS信息,軟件可直接參數讀入,無需重新整理;若無相關POS信息,則需重新整理*.txt格式文件重新導入。如下圖1所示為整理后POS信息,POS信息分別為緯度、經度、高度、俯仰角、航向角、翻滾角6個參數。
(2)新建工程,選擇放置目錄,添加照片文件,導入POS信息、設置處理模板,設置相對應坐標系;其后導入像控點坐標并刺點,用以控制DOM數據和DSM數據絕對定向。
(3)設置處理參數;一般主要設置:①點云和紋理選項中點云加密的圖像比例、點密度等;②DSM,正射影像和指數選項中的分辨率定制像素,其目的主要為在滿足精度條件的前提下提高影像處理速度,節約內業處理時間。
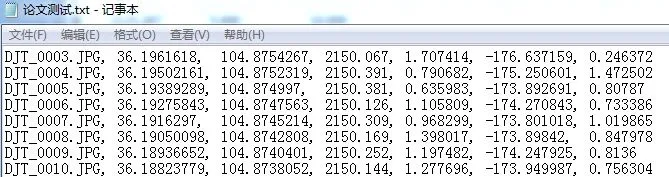
圖1 POS信息整理
(4)確認處理流程:確認處理流程無誤的情況下,點擊開始按鈕,可一鍵式處理數據,中途無需任何人工操作,自動處理完成后輸出質量報告、DOM、DSM成果數據。
Pix4D mapper軟件一鍵式數據處理的主要步驟為:①初始化處理;②點云及紋理;③DSM和DOM及指數生成三步,每一步操作完成后均會生成或更新質量報告,操作人員可隨時查看數據處理質量,及時調節參數,有利于提高最終成果的精度。大概操作流程如圖2所示。
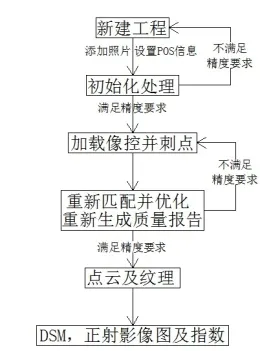
圖2 Pix4D mapper處理流程圖
3 應用案例
3.1 測區概況
本文以蘭州市七里河區無主煤礦航飛數據為例,重點解決因兩個架次航測相機獲取照片處理引起的空三彎曲問題[2,3]。測區主要位于東經103°51′9.84″,北緯35°54′5.2″,礦區內有硬化道路可供通行,局部有簡易道路,機械設備可到達施工場地,交通條件較好。
3.2 影像處理中存在的問題
Pix4D mapper軟件的處理流程如圖2所示,應用軟件新建工程后共加載2個架次149張照片進行初始化處理,初始化處理結果如圖3、圖4所示。其中綠色球代表飛機自帶POS信息的原始影像位置,藍色球表示空三結束,糾正后的原始影像坐標位置信息[4-6]。
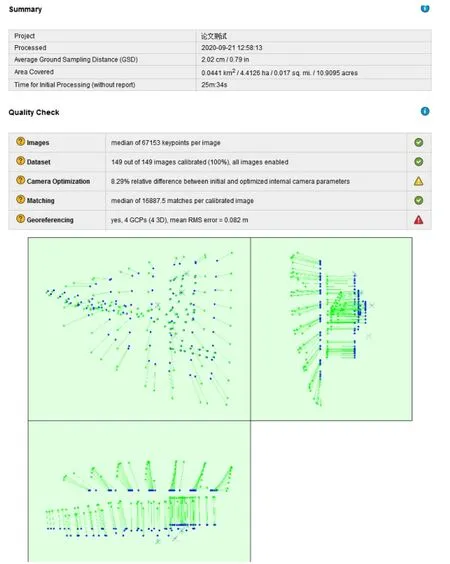
圖3 空三質量報告
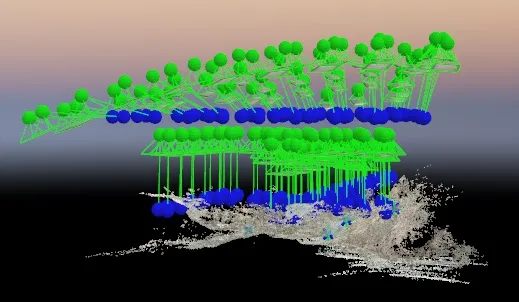
圖4 空三射線圖
在初始化處理結束,自動生成的質量報告結果顯示,數據質量明顯不合格。航飛高度偏低架次影像根據像控點糾正后基本滿足要求,但航飛高度較高架次糾正后,空三射線糾正沒有規律,且空三射線呈彎曲狀態,如在此基礎上繼續操作,得到DOM、DSM數據成果,絕對是不符合質量精度要求的。
3.3 解決辦法
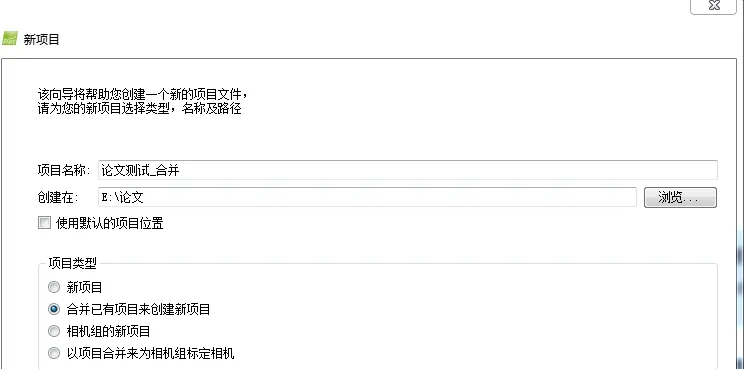
圖5 合并已有項目流程1
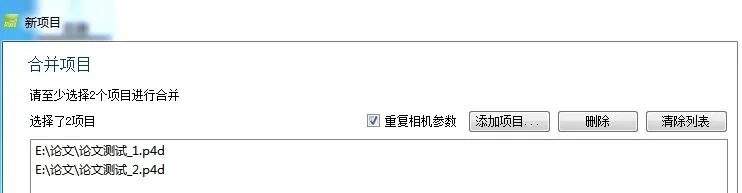
圖6 合并已有項目流程2
通過對原始航飛照片、POS信息、拍攝天氣、拍攝時段、光照強度等原因綜合分析,最大原因可能是兩個架次拍攝時間段不同,色彩不均勻導致軟件識別同名點有限,故而導致空三解算結果混亂。經過對Pix4D mapper軟件作業流程及算法運算深入了解后,計劃將本次拍攝航飛原始照片按拍攝架次分開進行新建工程、初始化處理,分別得到以下空三質量報告。再根據Pix4D mapper軟件,將已經得到的兩個架次工程文件按“合并已有項目來創建新項目”功能進行合并,并重新進行空中三角測量解算處理。最終得到符合要求DOM成果和DSM成果。

圖7 合并后空三質量報告
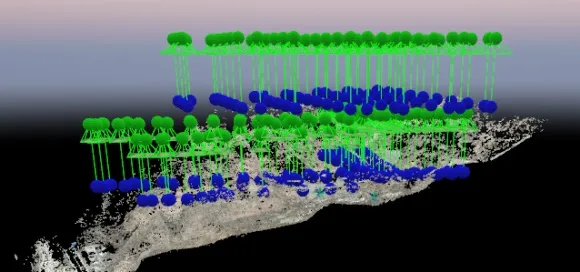
圖8 合并后空三射線圖
4 結論
本文通過對蘭州市七里河區無主煤礦測區航飛照片分析、討論,最后通過此方法成功解決了因拍攝時間不同,進而導致同名點匹配通過率較低引起的空三彎曲、折疊、變形等問題。經過后期其他項目輔助驗證,按航飛架次分別進行空中三角測量解算完成后再合并處理空中三角測量解算的方法,能有效解決大部分空三彎曲、折疊、變形等問題。
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中華手工(2017年2期)2017-06-06 23:00:31
汽車觀察(2016年3期)2016-02-28 13:16:26
中外會展(2014年4期)2014-11-27 07:46:46
中國質量與標準導報(2014年1期)2014-02-28 22:21:28
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32