懸臂式掘進機綜合自動控制系統研究
2020-12-28 11:58:26岳東旭
機械工程與自動化 2020年6期
岳東旭
(西山煤電 技術中心,山西 太原 030053)
0 引言
懸臂式掘進機是巷道掘進的設備,主要應用于煤礦或者鐵路的采掘生產和挖掘施工。傳統的掘進機采用人工目測和手動操作進行控制,不但欠挖和超挖情況時有發生,而且井下或洞內工作人員勞動強度大、安全性差。隨著計算機技術和信息技術的快速發展,基于多傳感器監測技術和實時控制技術的智能控制系統應運而生,掘進機綜合自動控制系統能實現采挖斷面的自動成形,提高掘進機工作效率,對于提高煤礦綜采的自動化水平和安全生產水平具有重要意義。
1 懸臂式掘進機控制功能
懸臂式掘進機的工作過程為:截割頭通過水平液壓油缸、垂直升降油缸和伸縮油缸實現水平回轉、垂直升降和伸縮等運動,對斷面進行截割使煤掉落;裝運機構的行星輪和鏟板將煤裝載到運輸機的輸送帶上,然后運出巷道;走行機構通過液壓馬達驅動實現掘進機機身移動。分析上述掘進機的工作過程及其智能化控制要求,一套完整的懸臂式掘進機綜合自動控制系統的基本功能包括:
(1)掘進機位姿測量。掘進機位姿測量是指對掘進機的位置和姿態進行測量,在掘進工作中,掘進機在巷道的坐標關系到掘進工作的進度和位置是否滿足要求,掘進機機身姿態關系到巷道成型質量,因此位姿測量是掘進機綜合自動控制系統最基本的功能之一。本文采用捷聯式慣導和地磁融合技術進行掘進機位姿測量,能滿足綜合自動控制系統對位姿測量的要求。
(2)截割頭位姿測量。為實現斷面的自動成形必須對截割頭位置和姿態進行測量,截割頭的位置和姿態取決于水平液壓缸、垂直液壓缸和伸縮液壓缸,本系統采用磁致伸縮式位移傳感器和傾角儀進行數據采集,然后配合相應算法進行位姿解算。
(3)煤巖識別。為實現自動截割必須對空轉、截割煤層和截割巖層進行識別,本文采用多傳感器對電機電流、油缸壓力和速度等運行參數進行采集,然后對多種數據進行融合從而分析當前截割狀態。
(4)自動成形截割。將油缸和截割電機的數據作為反饋量,用來控制截割頭的移速和轉速,能夠實現截割面的自動成形。
(5)遠程監測和控制。控制器采集的數據通過CAN總線上傳到機載計算機數據庫,機載計算機通過網絡將數據庫中的數據上傳給遠程計算機,實現數據的遠程顯示。掘進機綜合自動控制系統通過遠程通信接口接收遠程計算機發出的指令,根據指令完成遠程控制。
2 綜合自動控制系統硬件
圖1為懸臂式掘進機綜合自動控制系統硬件結構圖,包括傳感器模塊、DSP和CPLD控制模塊、比例液壓閥和掘進機執行機構、上位機和遠程數據庫等。捷聯慣導模塊、超聲波傳感器和激光傳感器通過RS485與數據采集模塊進行數據傳輸。電流傳感器、溫度傳感器、壓力傳感器、流量傳感器和位移傳感器通過AD模塊與數據采集模塊進行數據傳輸。數據采集模塊得到傳感器模塊采集的數據后進行處理,并根據一定的控制策略給出相應的控制信號,通過DA模塊控制比例液壓閥,或者通過IO結構直接對掘進機執行機構進行控制,同時與上位機進行數據傳輸,將數據存儲在數據庫中,遠程計算機可通過TCP協議對數據庫中的數據進行訪問。

圖1 懸臂式掘進機綜合自動控制系統硬件結構框圖
2.1 控制器選型
懸臂式掘進機綜合自動控制系統需要采集多組數據并完成處理,然后經過分析和計算,對電機轉速、油缸位移進行實時控制,實現掘進機的綜合自動化控制。為了滿足截割工藝算法的要求,控制器需要兼具豐富的接口和杰出的數據處理能力。相較于其他控制器,DSP采用哈佛結構設計,其運算速度更快、數據處理能力更強;CPLD具有多I/O接口、編程靈活的特點。因此,綜合自動控制系統的控制器選擇以DSP TMS320F2812為主控芯片,結合CPLD實現IO接口擴展功能。
2.2 接口電路設計
接口電路設計是“DSP+CPLD”控制方案的核心部分。數字量接口電路通過光電耦合芯片TLP293-4和驅動芯片ULN2803將控制器的3.3 V電壓轉換為24 V電壓。RS485接口電路由DSP的SCIB模塊和MAX485組成,由于控制截割電機的變頻器采用PLC控制,因此還設計了RS232接口與DSP通信。由于掘進機傳感器的輸出電壓較高,而DSP的ADC模塊電壓范圍不超過3.3 V,因此設計如圖2所示的模擬量采集接口電壓轉換電路,采用電阻分壓電路將電壓線性縮小,并設計了電壓跟隨電路和二極管鉗位電路以增強信號和保護DSP引腳。此外,還有控制量DA轉換電路、通信接口電路和SD卡接口電路等。
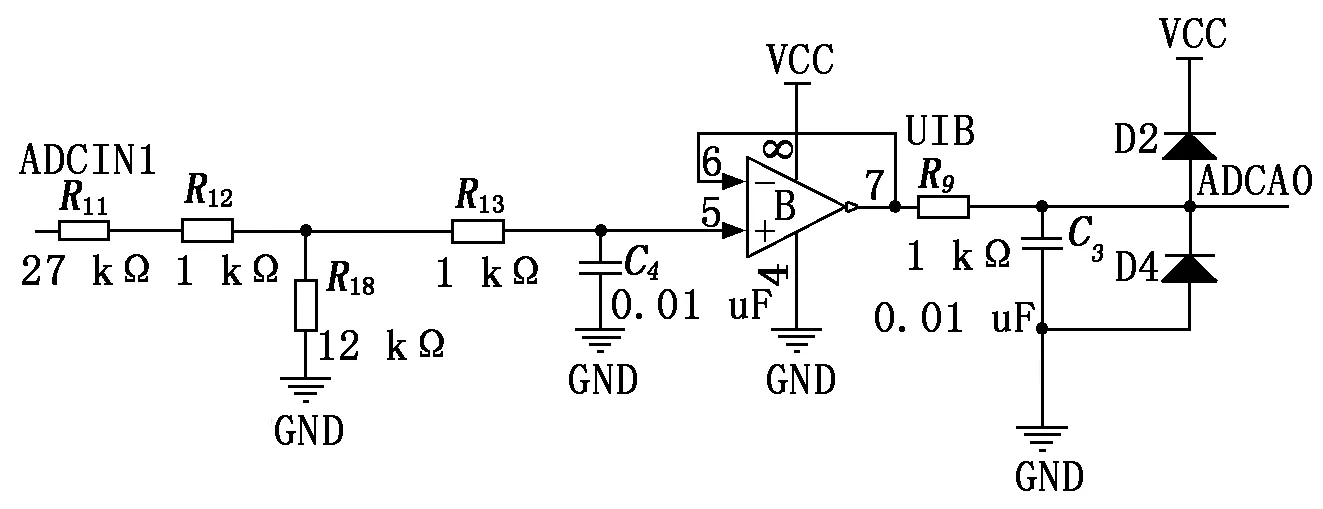
圖2 模擬量采集接口電壓轉換電路圖
3 綜合自動控制系統軟件
綜合自動控制系統軟件針對不同功能采用模塊化設計語言,分為巷道斷面自動成形截割軟件、下位機軟件和上位機軟件。
巷道斷面自動成形截割軟件是掘進機綜合自動控制系統的核心軟件。針對不同形狀的斷面,掘進機的工藝流程不同,截割路徑也不同。常見的標準斷面形狀有矩形、梯形和半圓拱形,不同斷面形狀的截割路徑如圖3所示。確定了不同形狀標準斷面的工藝流程和截割路徑后,編制巷道斷面自動截割成形程序,圖4為其流程圖。程序開始后選擇斷面形狀,調整截割臂位置在初始狀態后調用斷面自動成形控制子程序,通過控制液壓缸升降、回轉從而控制截割電機工作,當掘進頭到達工藝流程設定的終點后程序結束。
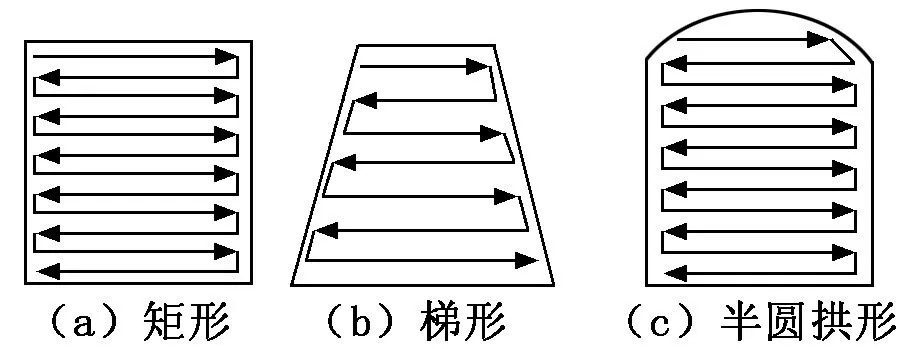
圖3 不同斷面形狀的截割路徑示意圖

圖4 巷道斷面自動截割成形流程
下位機軟件指的是掘進機綜合自動控制器與機載計算機、機載傳感器之間的通信軟件和數據采集軟件,包括數據采集與處理程序、輸入輸出程序和通訊程序等。上位機軟件指的是掘進機綜合自動控制器與遠方監控計算機通信軟件,以及遠方監控計算機的監測界面軟件等。上位機軟件采用VS和QT進行開發,完成掘進機各項參數和運行信息的采集、顯示和存儲。上位機軟件采用多線程技術提高其響應速度,主線程執行主控界面更新任務,兩個以輔助線程分別執行CAN通信任務和數據交互任務。
4 結束語
懸臂式掘進機綜合自動控制系統的功能包括掘進機位姿測量、截割頭位姿測量、煤巖識別、自動成形截割和遠程監測和控制。基于“DSP+CPLD”的控制器方案能夠充分發揮DSP和CPLD各自的優勢,具有數據處理能力強和接口豐富等特點。懸臂式掘進機綜合自動控制系統是一套結合多傳感器融合技術、煤巖識別技術和機器人技術的綜合控制系統,能夠提高綜采自動化水平和生產安全水平。