一種雙車協同搬運控制技術的研究
2021-01-04 11:08:50胡泊樓佩煌錢曉明武星樓航飛
機械制造與自動化 2020年6期
胡泊,樓佩煌,錢曉明,武星,樓航飛
(南京航空航天大學 機電學院,江蘇 南京 210016)
0 引言
當前全球在“德國工業4.0”、“中國制造2025”等新興理念影響下,智能物料輸送系統應運而生,自動導引車(automated guided vehicle,AGV)已成為工業自動化和物流自動化系統的重要部分。但是當需要運輸例如飛機機翼、高鐵車廂等大型零部件時,單AGV就會暴露出結構強度較弱、承載不足的缺點。為了解決這類問題,可以通過利用現有結構簡單、易于設計制造的AGV,采用多AGV協同搬運大型零部件。本文提出了一種基于Leader-Follower控制策略的雙AGV編隊的方法[1]和基于指數趨近率的自適應滑膜控制器,以實時調整從車軌跡跟蹤誤差,最終實現大型零部件的搬運。
1 雙車協同搬運模型
本文使用麥克納姆輪AGV作為雙車協同搬運的平臺,該搬運模型如圖1所示。

圖1 雙車協同搬運模型
圖1中主車按照既定的軌跡運行,從車和主車之間保持確定距離和角度,即主車和從車采用Leader-Follower編隊策略,按照預設編隊隊形前行,共同搬運大型的零部件。主車和從車搭載著零部件承載平臺,該平臺可小幅旋轉和移動,保證了從車在軌跡跟蹤存在偏差的時候有一定的余量進行距離補償和角度補償。兩車所搬運零件的長度為L,兩車之間夾角為θ。雙車協同搬運模型即保證在運輸過程中保持L和θ不變。
2 運動控制分析
2.1 麥克納姆輪AGV的運動模型
設麥克納姆輪AGV輪距為2 m,軸距為2L。設第i個車輪的角速度為ωi(i=1,2,3,4),單位為rad/s。當車體與世界坐標系下的夾角為β時,車體中心的速度為:
(1)

2.2 主-從車軌跡跟蹤誤差模型
在主-從車協同搬運的過程中,主車沿著既定的路徑前進,從車以主車的位姿作為參考點實時調整運動狀態,以保持主-從車之間的相對位姿不變,即相對于主車,從車保持靜止。因此可以將主-從車協同搬運的問題轉換為從車的軌跡跟蹤問題。
對于從車的軌跡跟蹤,首要任務是保持從車對主車的相對靜止,即以主車的幾何中心為參考點,主-從車幾何中心之間擁有確定的距離和角度,進而求解出從車的軌跡跟蹤誤差[2]。主-從車控制模型如圖2所示。

圖2 主-從車控制模型圖

(2)

(3)

(4)
至此,得出從車的軌跡跟蹤誤差。其中(xe,ye,φe)T是從車與其理想位姿之間的軌跡跟蹤誤差。于是,主-從協同搬運問題又轉換為從車的運動控制器問題。控制器以(xe,ye,φe)T為輸入,控制其趨近于0,最終保持主從車的相對靜止。
2.3 從車軌跡跟蹤運動控制器

1)基于指數趨近律的滑模控制器
對于從車的運動控制,因為滑模變結構能夠對非線性系統以及非連續性系統進行控制,并且響應迅速,具有較強魯棒性,但是由于主-從車運行環境復雜以及伺服電機系統的不穩定性,滑膜趨近率的參數需要進行實時調整,因此本文采用基于指數趨近律的滑模控制軌跡跟蹤控制器對從車進行控制[3]。

(5)
其中:Kp=diag(Kp1,Kp2,Kp3);Ki=diag(Ki1,Ki2,Ki3)。
為了提高系統的穩定性,減少滑膜控制在控制過程中位于平衡點的抖動,本文采用基于指數的滑模趨近律方法。相較于一般趨近率、等速趨近率等方法,該方法具有快速收斂的特點,能夠提高從車實時控制的動態性能。基于指數的滑模趨近律表達式如下:
λi>0,μi>0 (i=1,2,3)
(6)

(7)

符號函數sgn()會導致趨近率趨近0時,在切換面附近出現跳變,導致系統的抖動。為了緩解這種現象,引入飽和函數sat(),其表達式如下:
(8)
其中εi是正小量。則趨近率為:
(9)
2)基于指數趨近律的自適應滑模控制器

(10)
自適應律設計如下:
(11)
對式(5)兩端求導,可得:
(12)
即:
(13)
式(13)與式(6)相結合,可得:
(14)
(15)
同理可得:
(16)

結合式(1),即可得到4個輪子修正后的角速度:
(17)
3 仿真與分析
為了驗證第1節提出的基于指數趨近率的自適應滑膜控制器應用于麥克納姆倫AGV軌跡追蹤的可行性以及性能,本節對該控制器進行計算機仿真實驗。
首先設計一條軌跡,通過對該軌跡的跟蹤,分析控制器的性能。設計標稱軌跡為
(18)
即: 圓心為(0,0)、半徑為1的圓。軌跡的初始位置為[-2,0,0]。采用基于指數趨近率的自適應滑膜控制器進行仿真,仿真測試的系數為:
Kp=diag(11,12,7),Ki=diag(3,3,1);
λ1=λ2=λ3=2;
ρ1=1.5,ρ2=1.5,ρ3=1.5,
其仿真結果如圖3-圖5所示。
圖3為采用基于指數趨近率的自適應滑膜控制器輸出的圓弧軌跡跟蹤航向角對比圖。因為系統初始值與圓弧路徑存在較大的偏差值,導致系統實際的航向角與理想航向角存在較大的偏差值。經過2.5 s,實際航向角逐步趨向于理想航向角。圖4為圓弧軌跡跟蹤航向角度偏差。
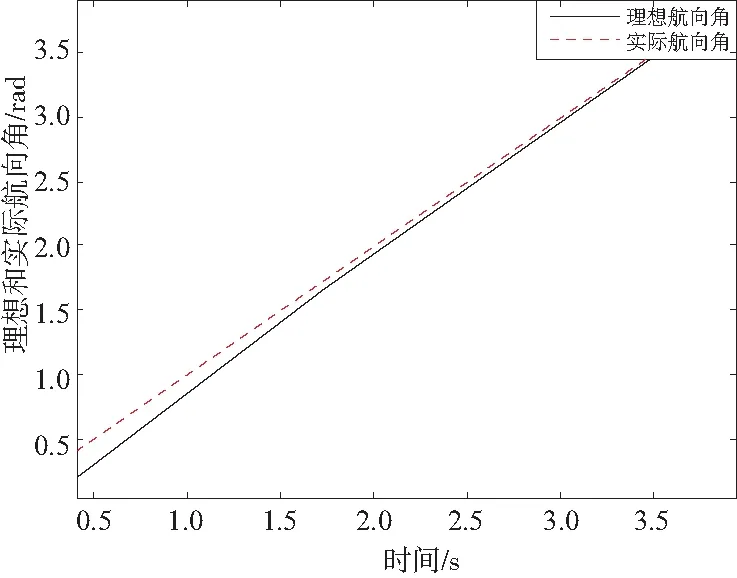
圖3 圓弧軌跡跟蹤航向角對比圖

圖4 圓弧軌跡跟蹤航向角度偏差
圖5為圓弧軌跡跟蹤時,在世界坐標系下實際位置與理想位置關于x方向與y方向的誤差。經過4 s,誤差逐步趨近于0。

圖5 圓弧軌跡跟蹤距離偏差
圖6為圓弧軌跡的位置跟蹤圖。從圖6可以看出,采用基于指數趨近率的自適應滑膜控制器,在有較大偏差的情況下,系統很快收斂于理想路徑,并在快速收斂后,系統存在較小誤差,穩定于理想路徑。因此該控制器具有很好的實時性、精確性和魯棒性。

圖6 圓弧軌跡的位置跟蹤圖
4 結語
本文提出了一種基于Leader-Follower編隊策略的雙車協同搬運方法,為解決搬運大型復雜零部件提供了一種思路。主車按照既定路線運行,從車實時跟蹤主車保持理想編隊隊形。在實時調整軌跡跟蹤誤差時,本文所提出的基于指數趨近率的自適應滑膜控制器具有很好的實時性、精確性和魯棒性。
