輪軌接觸式傳動機構 在船舶牽引系統中的應用研究
2021-01-04 05:41:07劉金華潘志翔周宏基陳文博
中國水運 2021年12期
劉金華 潘志翔 周宏基 陳文博



摘 要:船舶在隧洞中通航時危險系數較大,因此采用軌道牽引車牽引船舶通過隧洞。該牽引系統中輪軌結構在運行過程中易出現車輪空轉現象,使被牽引船舶航速及位置無法精確控制,導致出現安全事故,因此本文通過模擬牽引車運行情況,對比設定電機轉速與牽引車運行速度之間關系,論證船舶牽引系統速度和加速性能,為實際通航隧洞牽引系統建設提供理論依據。
關鍵詞:船舶牽引系統;輪軌接觸式傳動機構;通航隧洞;Adams仿真分析
中圖分類號:U664.2? ? ? ? 文獻標識碼:A? ? ? ? ? ? 文章編號:1006—7973(2021)12-0089-03
烏江地形地質條件復雜,烏江航道1000t級運輸船標準船型體態較大,又由于長距離隧洞內光線暗、船-岸富余距離較小,對航行穩定性有較高要求,因此船舶采用一種隧洞牽引系統來通過。這種應用于隧洞中牽引系統,通過對應用于船塢中引船系統改進而來[1],國內齊俊麟論證這種引船技術在三峽船閘應用前景[2]。應用于通航隧洞中牽引系統由驅動機構、導向機構、傳動機構、供電系統、控制系統等組成,設置在航道兩側軌道上運行牽引車隨船前進,為船舶提供牽引力與橫向拉力。
其中,傳動機構作為牽引系統中重要組成部分,承載船舶橫向牽引力以及前進動力,關系到船舶能否在隧洞中安全通航。船舶牽引系統中輪軌接觸式傳動機構類似于輪軌式鐵路列車,列車在高速輪軌運動時由于地面不平整以及受力不均勻,會出現車輪騰空瞬間脫離軌道導致車輪空轉[3]。對于牽引系統中輪軌結構,不僅受到向下壓力,還會受到較大側向拉力,可能會發生車輪空轉現象,使被牽引船舶航速及位置無法精確控制,導致出現安全事故。因此,本文通過探究輪軌接觸式傳動機構傳動下,船舶能否與牽引車同步運行,進而探究牽引系統速度以及加速性能,并以此為實際通航隧洞牽引系統建設提供理論依據。
1船舶牽引系統及其輪軌結構
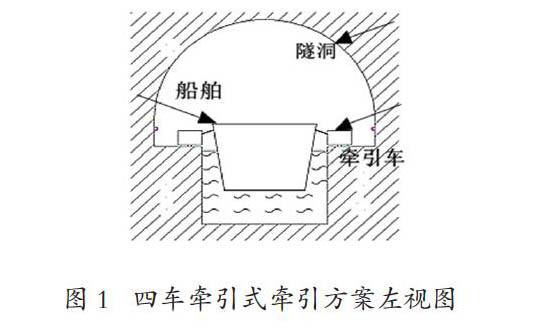
牽引繩從隧洞入口開始系攬進入隧洞,前兩組牽引小車提供航向驅動力,后兩組牽引小車提供定位作用力和制動力。四組車相對位置提供纜繩內部預緊力,固定船舶航道內位置,牽引車運行于航道兩側軌道,該方案運行方式如圖1所示。
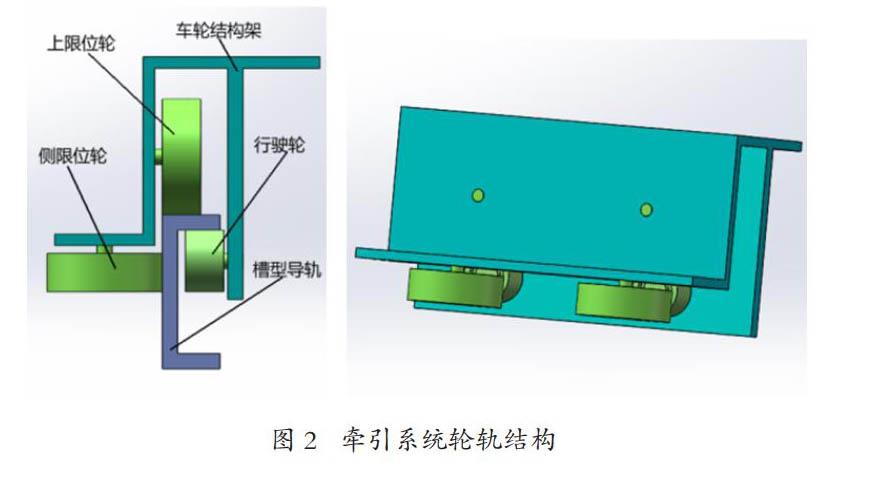
牽引系統輪軌結構如圖2所示,其中左圖側向限位滾輪、上側限位小輪以及牽引車行駛輪組成定位滾輪結構(右圖),應用于船舶牽引系統中輪軌結構采用固定于地面槽型導軌以及牽引車滾輪組成定位導向結構,以此避免牽引車受到鋼絲繩側向拉力出現空轉及側翻可能。為驗證該結構實用性,下文通過仿真模擬牽引車在軌道上受側向拉力時運行情況。
2船模運行速度運動學仿真
尾部鋼絲繩主要作用是調整小車偏轉位置,起定位作用,牽引力大小視所需穩定程度與船舶慣性力而定,此處以提供牽引力前部牽引車為例,給定鋼絲繩側向拉力恒定1KN。
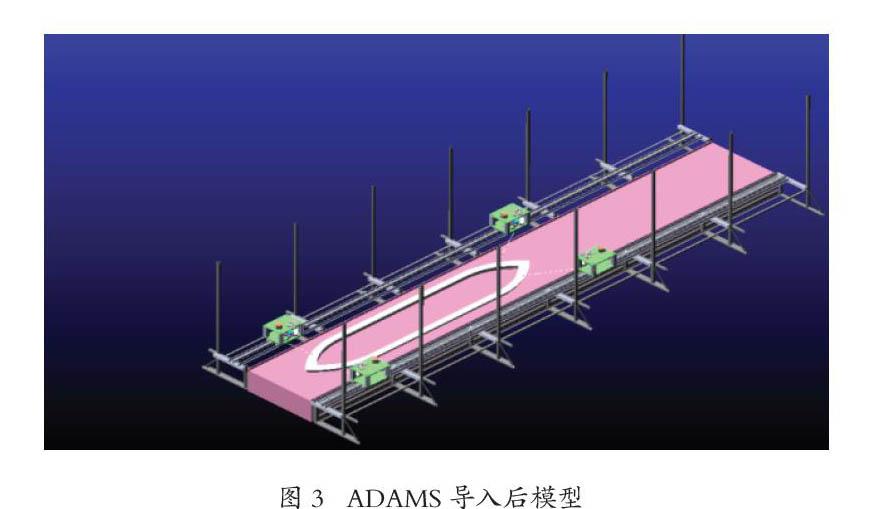
建立牽引系統三維模型,確定模型中柔性連接處以及船體接觸庫倫摩擦代換等效參數,將模型連接處進行布爾操作,傳動機構和電機等關鍵部位進行ADAMS仿真軟件內參數化建模并給予替換。根據實驗室實驗需求和環境要求,從STARCCM+中算出轉化為ADAMS相關等效參數進行模擬分析。經過相關參數和運動副設定,在建模過程中對除計算域外對結構做出簡化,進行牽引系統運動學仿真。
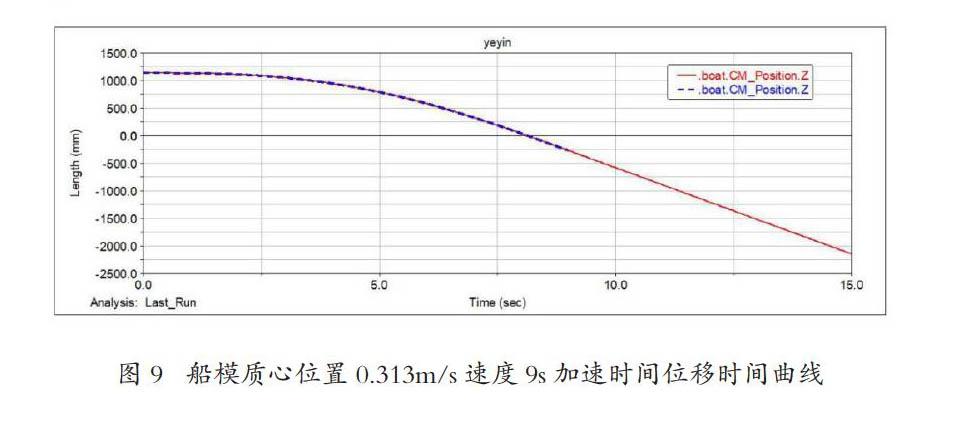
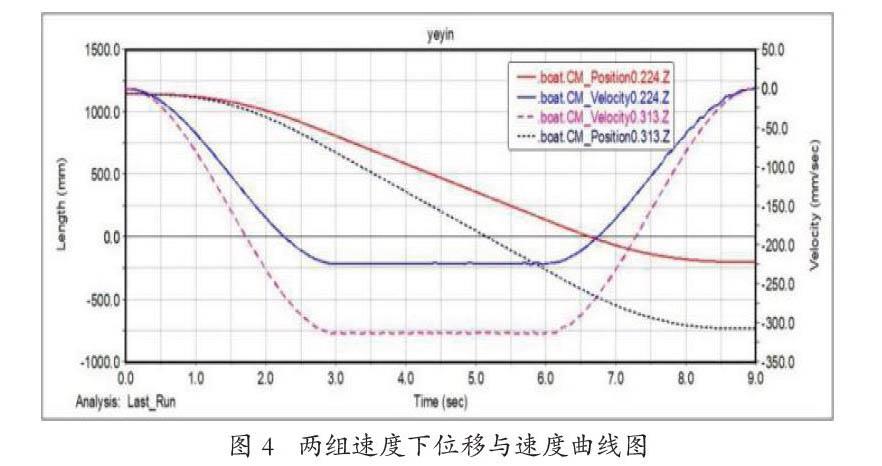
圖4實線表示z軸負方向船模位移曲線,為和實驗數據單位一致,設z軸負方向為運行方向,紅色實線為速度為0.224m/s時位移曲線,藍色實線為其速度曲線。黑色虛線為速度為0.313m/s時位移曲線,玫紅色虛線為其速度曲線。曲線可以看出是連貫柔和,表明不同速度下齒輪齒條傳動機構運行可靠,同時與設定牽引車驅動達到同步狀態。
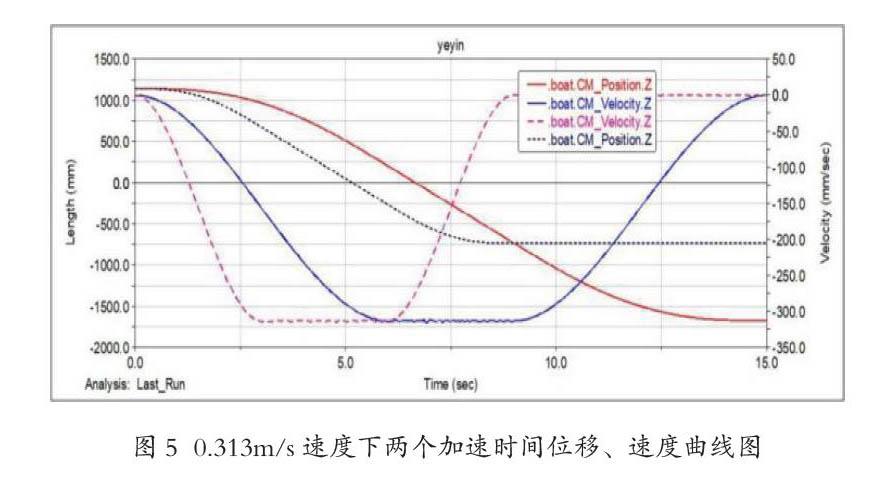
圖5表示不同加速時間位移和速度曲線,實線為加速時間6s速度和位移曲線,繪制曲線,導出數值與實驗數據進行擬合對比。
3 加速性能測試
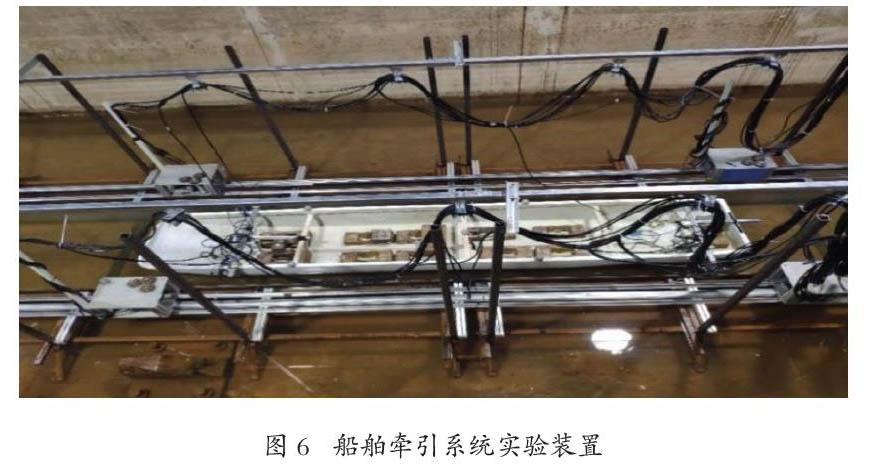
根據實際通航隧洞環境以及通航建筑物之間連接渠道和渡槽等特殊限制性航道特征,船舶在長距離封閉水域條件下運行時,航速應低于2m/s,結合相應船舶寬度、吃水與航道尺度關聯性模型[4],對長距離通航隧洞牽引系統進行實驗分析。設置實驗條件為0.8m航寬,0.25m水深,0.335m/s,0.313m/s,0.219m/s三種速度橫向偏移量,探究船舶在運動中受到沖擊力時系統穩定性。通過等比例縮小船舶與牽引系統,按照相似準則[5]構建與實際相符合船體結構、隧洞通航環境與牽引系統。測試對象是牽引船模,通過對船模數據采集反映牽引系統各種性能。
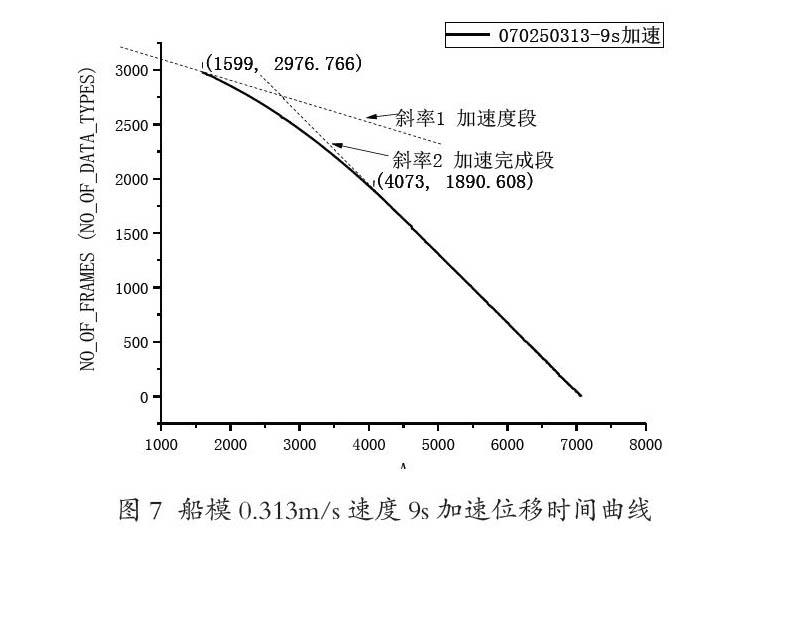
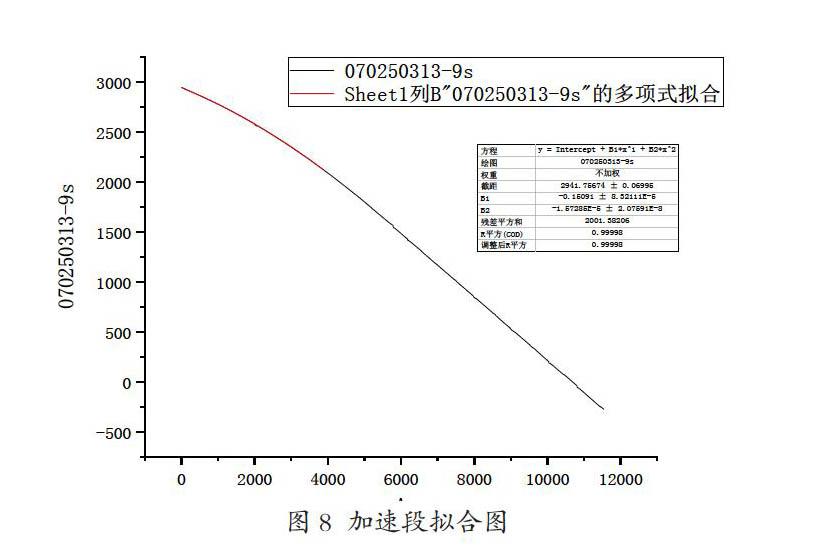
以0.7米航寬、0.25m水深、最終速度0.313m/s、加速實時間9s為例,對實驗過程中運行方向繪制位移時間圖,并對加速段進行多項式擬合和線性擬合,擬合圖如8,擬合報表如表2。
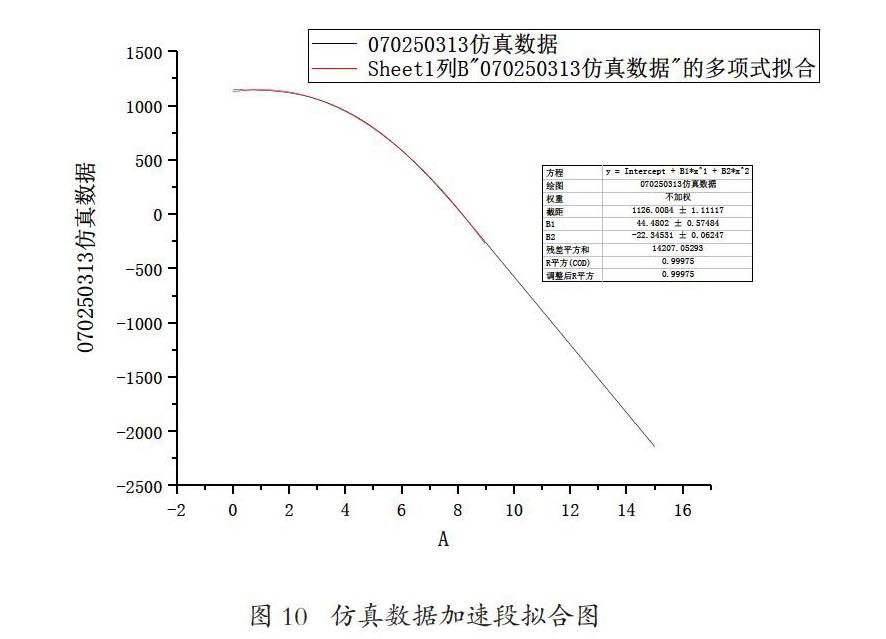
同樣運行條件下,對仿真過程中運行方向繪制位移時間圖,并將后處理數據導出繪制擬合圖,對加速段進行多項式擬合和線性擬合,擬合圖如圖10,擬合報表如表3。
由擬合報表2和表3可知,雖然記錄起點由于設備和仿真設定不同不具有參考價值,但斜率值基本一致,即設定速度0.313m/s時實驗過程中速度為-0.31484m/s,誤差為0.588%;仿真速度為-0.313164m/s, 誤差為0.052%。
由擬合報表對加速度段做二次項擬合 ,B2值*2為加速度值,理論設定值為-3.4778 E-2m/s2,實驗值為-3.1457E-2m/s2,誤差為9.55%;仿真值為-3.457E-2m/s2,誤差為0.598%。
除實驗數據中加速過程加速度誤差較大外,其他數據基本與設計一致,主要為加速段起始位置有初速度造成,即由于監測距離限制,數據擬合過程中無法得到完整方程。
加速與恒速性能測試中,通過擬合方程對仿真數據和實驗數據進行對比,在統計學中對變量進行線性回歸分析,采用最小二乘法進行參數估計時,R平方為回歸平方和與總離差平方和比值。R平方介于0到1之間,越接近1回歸擬合效果越好,一般認為超過0.8模型擬合優度就比較高。本文在仿真模型和數據值方面R平方值均為0.9以上,擬合效果很好時,比對位移時間曲線斜率,誤差1%之內。
4結論
加速性能測試印證得,可通過根據改變伺服電機脈沖頻率來有效控制牽引車和被牽引船模速度和加速度,實現船模位置精確定位。通過擬合方程對仿真數據和實驗數據進行對比,表明輪軌機構運行較穩定,不易發生空轉,電機控制較佳,驗證出牽引系統具有較好加速與恒速性能。
參考文獻:
[1] 國防科學技術工業委員會.干船塢設計規范: CB/T 8524—2011.北京: 中國標準出版社,2011.
[2] 齊俊麟. 機械牽引協助船舶進出船閘技術論證[J]. 船海工程.2017,46(04):215-219.
[3] 楊素亭. 輪軌式鐵路列車運動形態分析[J]. 鐵道警官高等專科學校學報. 2010,20(06): 52-55.
[4] 孫精石. 從《內河通航標準》看某些特殊限制性航道寬度確定[J]. 水道港口,2006(05):300-305.
[5] 溫過路. 大型船舶系纜力影響因素試驗研究[D]. 大連理工大學, 2006.
[6] 周浩. 線性數據擬合方法誤差分析及其改進應用[J]. 大學數學, 2013,29(01): 70-76.
