面向移動健康應用的UWB 室內定位方法
2021-01-05 10:57:20陳賢祥杜利東趙榮建
導航定位學報 2020年6期
王 鵬,方 震,夏 攀,陳賢祥,杜利東,趙榮建
(1.中國科學院空天信息創新研究院 北京 100190;2.中國科學院大學 北京 100049)
0 引言
移動健康監護系統在醫院或養老院等場景中具有很廣闊的應用前景[1-3]。在醫院中,有些病人的病情需要被長期監測,傳統的方法是醫療監護人員依靠病房內固定的醫療設備定時監測,這種方法對病人的行動能力有一定限制。在養老院中,也有同樣的問題,隨著年齡的增長,大多數老年人都有一些典型的老年病,其中有一些慢性病需要被長期監測[1]。但是在一些特殊的環境中,如需要對患有視力障礙病人的病情進行監護而不想限制其行動能力時,不僅需要對其身體狀態進行監測,也需要進行實時輔助定位與導航[4]。或針對一些大型建筑物、倉庫、大型艦艇內部的突發情況,如火災、地震等,消防員進入現場進行救援,其身體狀況和具體位置也需要被實時監測,以便更好地保障消防員安全,指揮救援工作[5]。
很多研究機構對基于無線傳感器網絡的移動健康監護系統進行了研究:文獻[6-7]在2004 年,設計并實現了“CodeBlue”無線健康監護系統,可以實現對用戶的心電圖(electrocardiogram, ECG)、心率、血氧的遠程監測;文獻[8]在2006 年,針對家庭環境設計了基于成熟 MICAz 傳感器網絡的“ALARM-NET”系統,用以監測居住環境中人員的身體狀況;文獻[9]于2010 年設計了1 種無線臨床監護系統,并進行了長期臨床測試,結果表明無線傳感網絡對于病人病情的持續監測具有可行性;文獻[10]于2012 年針對老年人健康問題,提出了“ViCare”系統,用以持續監測老年人的生理參數及活動狀況;文獻[11]于 2015 年,提出了1 種基于輕量級路由算法的無線健康監護網絡系統,支持移動狀態下生理參數測量。
以上健康監護系統都可以覆蓋大面積建筑物,但是都沒有提及室內定位功能;然而針對一些具體應用場景,如大型倉庫或艦艇中的突發事故、養老院中老人的緊急護理等,需要及時獲知受困人員或病人的位置及身體狀況。文獻[2]通過調研發現,室內定位系統在上述場景中的應用仍是1 個未被完全探索的領域;但隨著可穿戴健康技術及室內定位技術的發展,這一問題有望得到解決。室內定位應用到上述場景中時,也需要達到一些具體的限制條件,文獻[1]通過調研,提出了定位精度、覆蓋面積和更新頻率等具體要求。有很多無線技術可用于室內定位,如無線保真(wireless fidelity, WiFi)、藍牙(blue tooth, BT)、紫蜂(zigbee, ZB)等;而超寬帶(ultra wide band,UWB)技術,由于其高頻段寬帶寬的優異特性,對室內多徑干擾具有很好的抑制能力,故被很多研究者用于室內定位場景中[12-14]。然而這些系統進行實驗的場景都比較有限,通常是在1 個小空間內進行實驗的,并不具有實用意義[15-16],而且將UWB 定位技術應用到健康監護應用場景的研究也很少。
針對上述問題,本文提出1 種用于移動健康監護的超寬帶室內定位系統設計方法,該系統由固定在墻壁上的多個定位錨節點和佩戴在被監護者身上的可穿戴監護設備組成。將全球衛星導航系統(global navigation satellite system, GNSS)中的幾何精度衰減因子(geometric dilution of precision,GDOP)引入室內定位系統中,通過GDOP 的仿真結果,選擇定位錨節點最佳安裝位置,隨后定位錨節點自主連接組成多簇樹狀網絡,該網絡兼具室內定位和數據傳輸功能。通過分析定位過程,將傳統的對稱雙邊雙向測距法(symmetrical doublesided two-way-ranging method, SDS-TWR)及擴展卡爾曼濾波法(extended Kalman filtering, EKF)簡化為雙邊雙向測距法(double-sided two-wayranging method, DS-TWR)及線性卡爾曼濾波法(Kalman filtering, KF),使其更適合集成在弱算力的嵌入式系統中。
1 方法
1.1 系統整體設計
該系統結合UWB 室內定位技術和生命體征監測技術,為覆蓋大面積樓宇區域,整體設計如圖1 所示。
將大空間分割為多個定位簇空間,在單個定位簇空間內,利用GDOP 仿真結果合理分布4 個定位錨節點,錨節點固定在墻壁或天花板上。該空間內待定位的目標節點佩戴在使用者身上,定時測量與4 個錨節點的距離信息,同時測量人體生命體征信息。通過選擇1 個位置最佳的錨節點作為路由錨節點,同時作為簇頭,與其他簇空間的簇頭相連接,所有的簇頭都通過交換機連接在協調器上,最終形成1 種多簇樹狀網絡,將定位信息及生理參數信息傳輸至監控終端,以供監護人員查看。
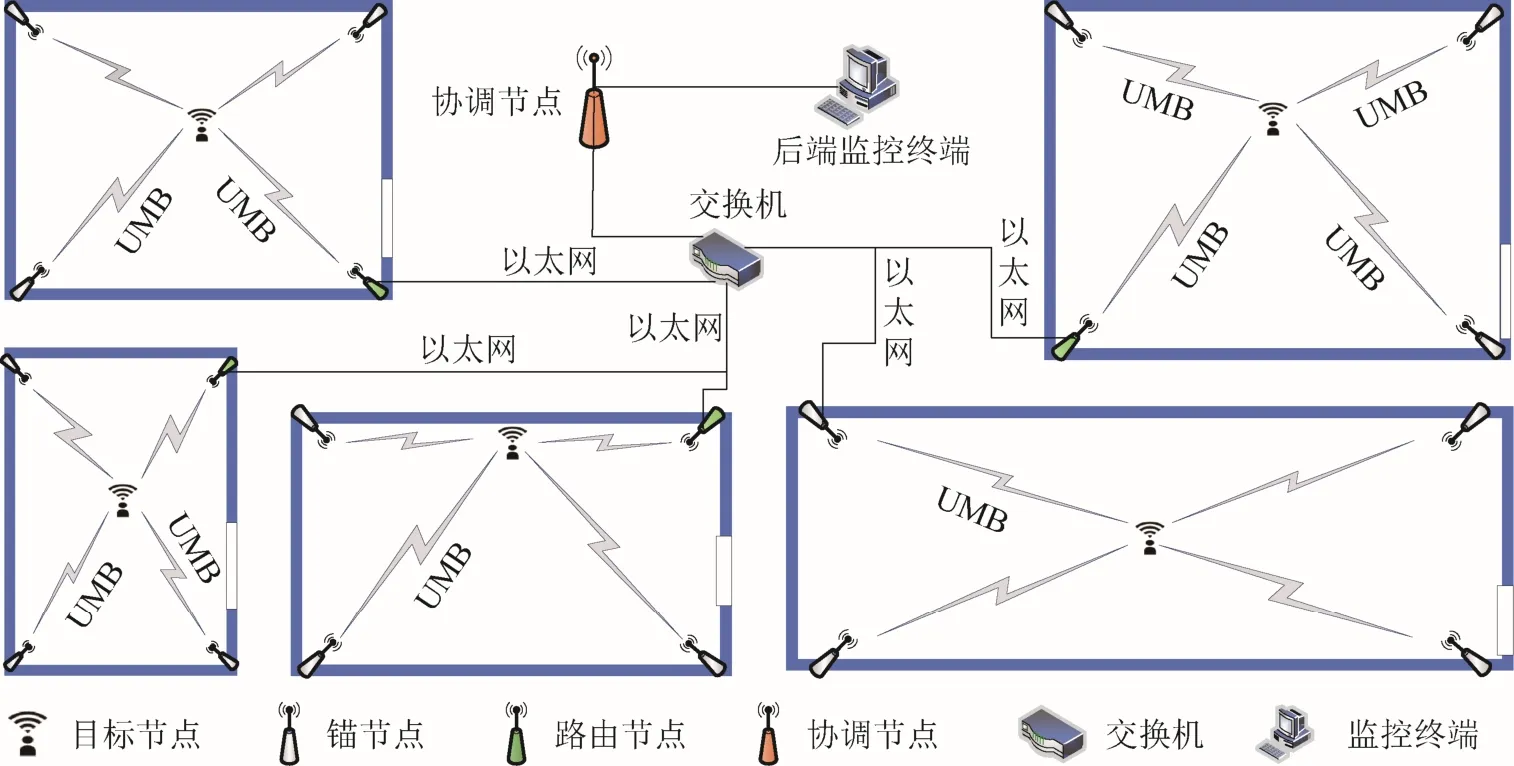
圖1 室內定位與健康監護系統示意圖
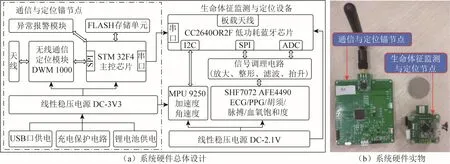
圖2 硬件系統
該系統的硬件整體設計如圖2(a)所示,包括通信與定位設備和生命體征監測與定位設備2 部分;圖2(b)為實驗原型設備。由于通信與定位錨節點固定在建筑物的墻壁或天花板上,只需要具有通信、定位、報警功能即可,所以其結構可簡化,而生命體征監測與定位設備,不僅需要包含通信與定位設備的所有功能,而且需要集成各種生物傳感器,功能復雜。因此將通信與定位信標設備設計為底座,將生命體征監測與定位設備設計為擴展板,通過串口與底座相連接,擴展板采集傳感器數據,通過串口將數據傳輸給底板,底板負責數據處理和無線通信。UWB 定位錨節點和目標節點選用達卡韋弗(Dacawave)公司的DWM1000 UWB定位模塊,該模塊兼容IEEE 802.15.4-2011 標準,工作頻段覆蓋3.5~6.5 GHz,對室內多徑干擾具有較好的抑制作用,生物傳感器選擇SHF7072 和AFE4490,可以測量人體 ECG、光電容積描記(photoplethysmography, PPG)信號,并進一步解析出呼吸、脈率、血氧飽和度等生理參數。所設計的實驗原型設備如圖2(b)所示。
1.2 定位錨節點最優配置
基于UWB 的室內定位方案,須在室內部署一定數量的固定的錨節點,定位錨節點須固定在室內的墻壁或天花板上,錨節點的數量和分布位置對定位精度有很大影響。從GNSS 的研究結果來看,不同的衛星分布結構對地面用戶的定位精度影響可以用GDOP 來表示[17-18]。GDOP 與定位誤差正相關,等級劃分如表1 所示[18]。因此,將這一概念引入室內定位場景中以確定錨節點的數量和安裝位置。
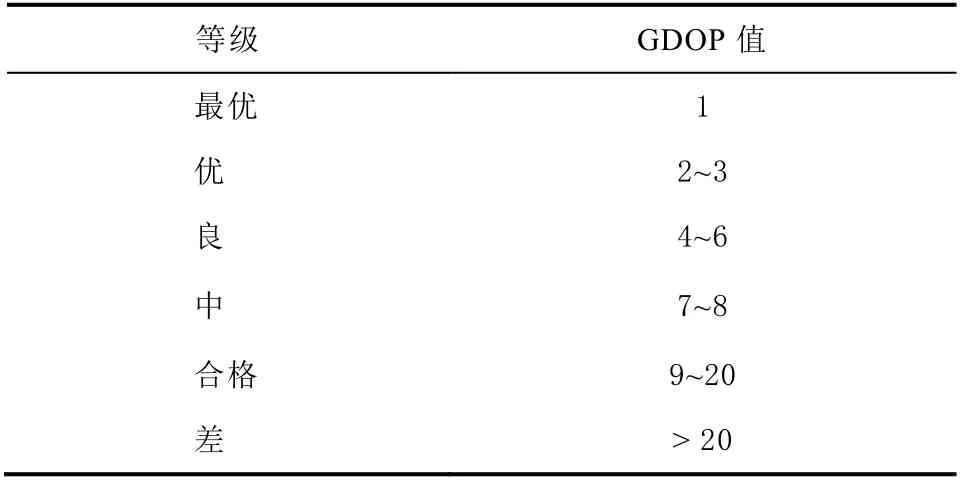
表1 GDOP 等級劃分表[18]
由于室內環境的多徑干擾,待定位目標節點和N個錨節點之間的距離的測量值中包含誤差,這時目標節點和錨節點之間的距離為
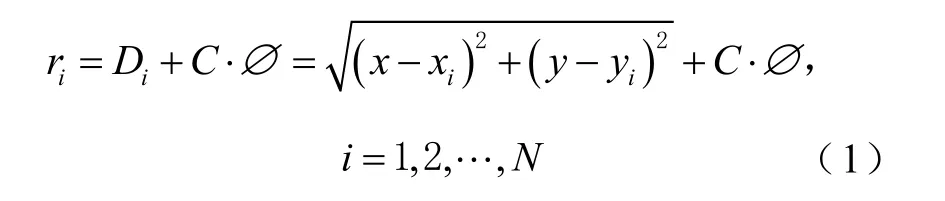
式中:ri為目標節點與第i 個錨節點之間的真實距離;Di為測量距離;C 為電磁波在空氣中傳播的速度;?為時間誤差;(xi,yi),i =1,2,…,N為第 i 個錨節點坐標;目標節點的坐標設為(x,y)。2 維空間內的定位誤差設為Δri,可以分解為2 個坐標軸上的坐標誤差(Δx,Δy),將式(1)進行泰勒展開,只保留1 階項可得
將式(2)表示為矩陣形式,即
求解定位坐標誤差δ,由最小二乘法得

設

則由文獻[18]中GDOP 的概念得

基于以上室內環境下GDOP 公式的推導,利用軟件分別仿真不同形狀的室內環境下,不同錨節點布局方案的GDOP 值,比較不同的方案,為實際布局提供理論基礎。考慮實際定位環境及設備成本,分別在10 m×10 m 正方形區域和10 m×5 m 長方形區域內,仿真3 錨節點對角安裝、4 錨節點對角安裝、4 錨節點對面安裝方案,仿真結果如圖3、圖4 所示。由仿真結果可知,4 錨節點對角安裝方案的平均GDOP 值在2 種定位區域中都是最小的,因此在實際實驗時選擇此方案布局錨節點。
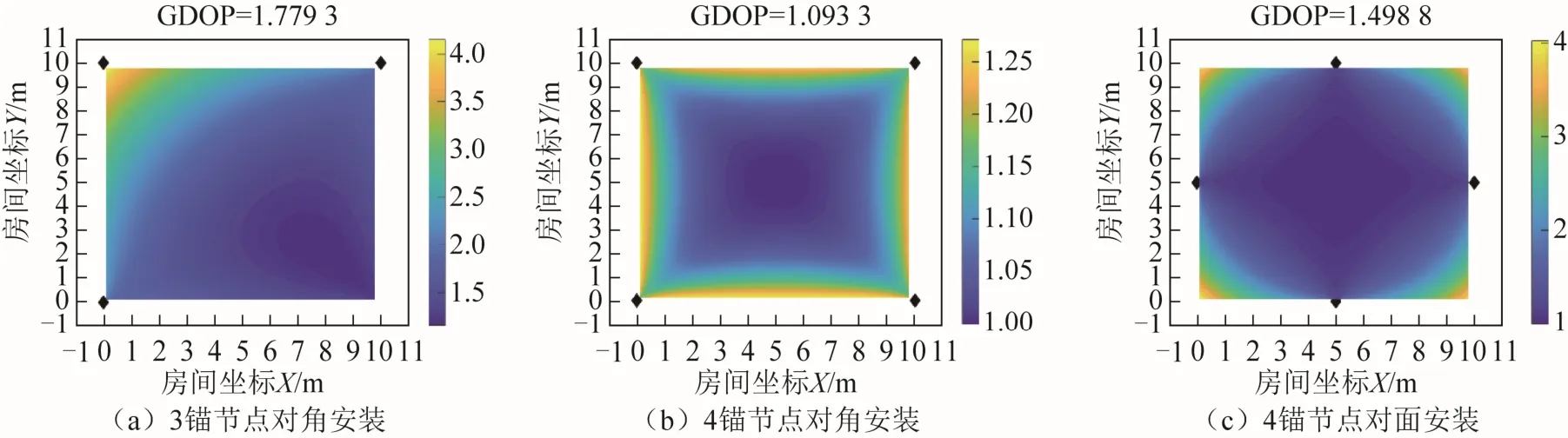
圖3 10 m×10 m 正方形區域仿真結果
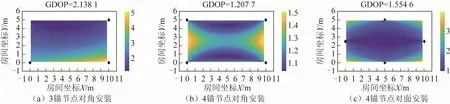
圖4 10 m×5 m 長方形區域仿真結果
1.3 DS-TWR 測距法
錨節點部署完成后,目標節點進行室內定位時,首先需測量與各個錨節點之間的距離。傳統的測距方法為基于到達時間(time of arrival, TOA)法的對稱雙邊雙向測距法(SDS-TWR)[19-20],如圖5所示。目標節點發起測距請求后,轉換為接收狀態,處于接收狀態的錨節點接收請求并返回應答,隨后向目標節點發送新的測距請求,目標節點接收到請求后返回應答。整個過程在2 個節點之間共發送5 次數據包,共進行了4 次測距,產生4 個時間間隔即T1、T2、T3及T4,測距結果表示為

式中D 為目標節點與錨節點之間的距離。采用平均測距結果,可以減小由于某次測距誤差過大對實際測量結果造成的影響。本系統中對SDS-TWR方法進行改進,將錨節點的返回應答和測距請求信息合并為同一組信息,將整個測距過程發送的數據包數量減少為4 次,改進后的DS-TWR 測距方法如圖6 所示。這樣處理的好處在于可以縮短1 次測距的時間,增加單位時間內的測距頻次,同時節省錨節點的能量,滿足低復雜度要求。

圖5 對稱雙邊雙向測距法(SDS-TWR)
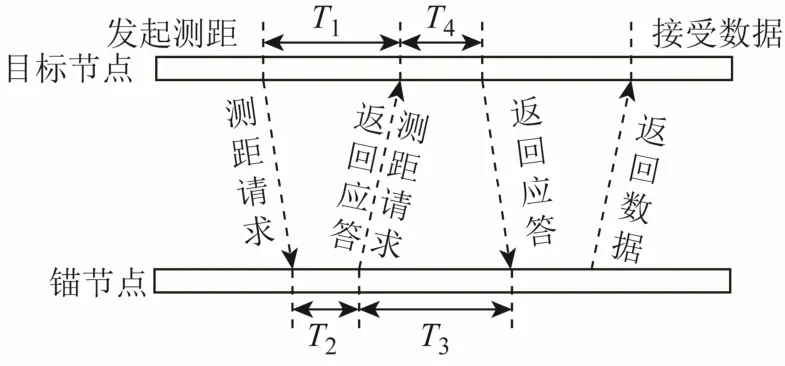
圖6 雙邊雙向測距法(DS-TWR)
在視距環境下的UWB 測距,其測距精度主要受限于UWB 芯片所使用的晶振精度。因此引入時間測量誤差,假設目標節點和錨節點的時鐘偏移量分別為eA和eB,時鐘漂移量為1×10-6,同時將式(8)經過變換后可表示為
則測距誤差可表示為

由式(10)可知,測距誤差與設備的時鐘偏移量有關。假設設備使用的晶振的時鐘偏移為20×10-6,目標節點與錨節點相距100 m,則到達時間約為333 ns,到達時間誤差約為6.7 ps,產生的測距誤差約為2.2 mm,誤差達到毫米級。因此通過選擇精度高的晶振,可使得DS-TWR 具有很小的視距測距誤差。本文使用的實驗設備所采用的晶振的時鐘偏移為20×10-6。
1.4 定位坐標解算方法
將單個簇空間內的室內定位系統簡化為如圖7 所示的數學模型,設4 個錨節點的坐標分別為(x1,y1)、 (x2,y2)、 (x3,y3)、 (x4,y4),為方便表示,統一表示為(xi,yi),i =1,2,3,4。目標節點的坐標未知,設為(x,y)。這樣,標簽節點到第i 個錨節點的距離可以表示為

為解算出目標節點的坐標,通常采用最小二乘法[19-21]。最小二乘法以最小化誤差平方和為原則進行方程求解,但最小二乘法只能解決線性問題,所以需將式(11)線性化。線性化之后得到
式中:
利用最小二乘法解算得到目標節點的坐標為
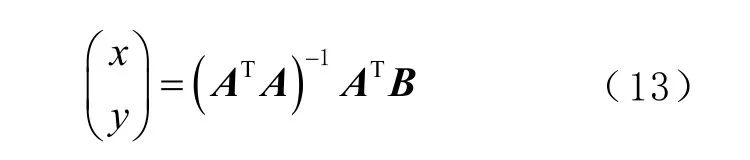
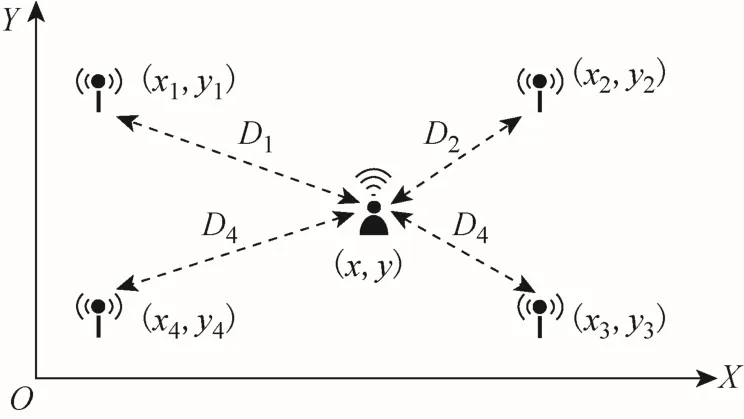
圖7 定位系統數學模型
1.5 線性卡爾曼濾波應用
UWB 定位數據會受到室內環境的影響,比如多徑干擾、人員走動干擾、門窗關閉干擾等,因此需要對得到的數據進行濾波處理。卡爾曼濾波(Kalman filtering, KF)算法是在最小均方誤差的準則下,將估計值與測量值進行最佳擬合,是1 種最優線性狀態估計方法。傳統的室內定位方法中,處理定位數據均采用擴展卡爾曼濾波[22-23]法,原因是將觀測方程作為非線性方程處理;但是本文在處理過程中發現,觀測方程可以通過適當的變換,變為線性方程,因此本文仍采用線性卡爾曼濾波法處理定位數據。
UWB 室內定位系統的狀態轉移方程和觀測方程為:
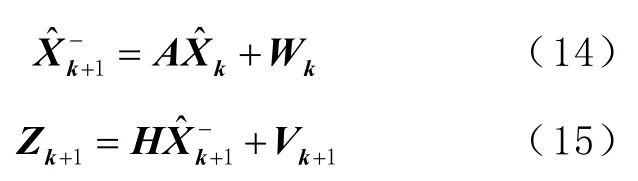
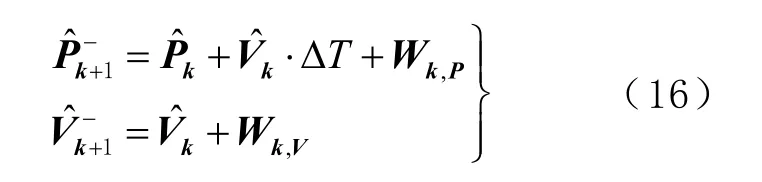
將式(16)表示為
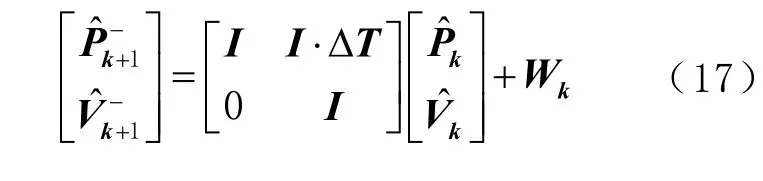
通過對比式(14)和式(17),可以得到:

在1.4 節中將式(11)進行變換,可以得出線性的觀測方程式(12),觀測矩陣H表示為
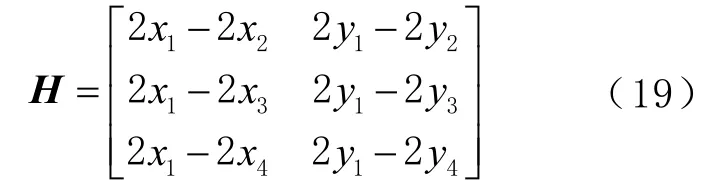
接下來利用線性卡爾曼濾波處理視距環境下的定位數據,避免了使用擴展卡爾曼濾波需要計算狀態轉移方程和觀測方程的雅可比矩陣的復雜問題,滿足低復雜度需求。
2 實驗與結果分析
2.1 定位及數據傳輸網絡
由于室內環境比較復雜,而且面積較大,布置少量的錨節點并不能很有效地進行室內定位,某些區域不能測量到錨節點的信號,因此需要根據室內環境布置較多的錨節點,并且盡量布置在視距范圍內,以最大限度地覆蓋整個室內區域。如圖8 所示,本文提出1 種樹狀分簇網絡,將1 個較大的室內環境分割為眾多小區域,每1 個小區域作為1 個基本簇單元,包含4 個錨節點(其中1 個是兼具路由功能的錨節點)和若干個待定位節點。4 個錨節點中選擇位置最佳的1 個(通常靠近門口)作為路由錨節點,負責下發測距命令,上傳數據到計算機,并廣播消息,為待定位節點分配時隙,同時作為基本簇單元的簇頭,剩余3 個錨節點作為1 級簇成員,接收路由錨節點的命令,對待定位節點發起測距請求。待定位節點作為2 級簇成員,應答普通錨節點的測距請求,并監測佩戴者的生理參數,向主錨節點傳輸位置信息和生理參數信息。整體無線定位網絡由若干基本簇單元組成,可擴展性強,可覆蓋大面積樓宇區域。
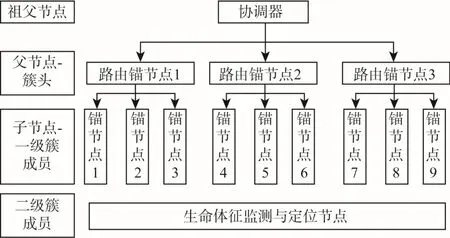
圖8 樹狀分簇網絡結構
為使運動過程中整個數據傳輸網絡不丟失數據,本文設計了“Poll-Ack 消息應答機制”。1 次測距過程完成之后,待定位節點將定位數據和生理參數數據發送給路由錨節點,路由錨節點轉發給協調器,協調器收到消息之后,將消息傳輸給上位機,同時返回應答信號給路由錨節點,路由錨節點再將應答信號返回給目標節點,完成消息發送過程。如果目標節點超過一定時間沒有接收到應答信號,則重新發送本次數據,直到發送完成。這樣可以保證數據的正確傳輸,減少丟包率。經測試,1 次測距完成需5 ms,發送完成1 次“測距數據”需8 ms,1 次定位過程包含4 次測距過程,因此,定位頻率約為35 次/s,滿足實時性需求。
2.2 實驗環境
本系統在科電大廈11 層進行實際部署,部署方案如圖9 所示,在實驗室內及樓道采用GDOP值最小的“4 錨節點對角安裝”方案部署8 個錨節點。分別完成2 個實驗:實驗①,實驗人員佩戴“生命體征監測與定位節點”,在區域1 內進行靜止狀態下的定位誤差實驗,分別選擇72 個待定位點進行測試,每2 個待定位點間距0.8 m;實驗②,實驗人員在區域1 及區域2 內,按照設定路徑以正常速度走動,測試定位系統在運動狀態下的定位誤差。實驗中對錨節點的坐標進行手動量取與設定,采用激光測距儀進行測量,其測距量程為120 m,精度為0.001 m,設定的錨節點坐標如表2 所示。
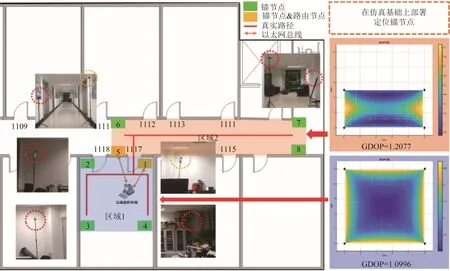
圖9 實驗環境部署
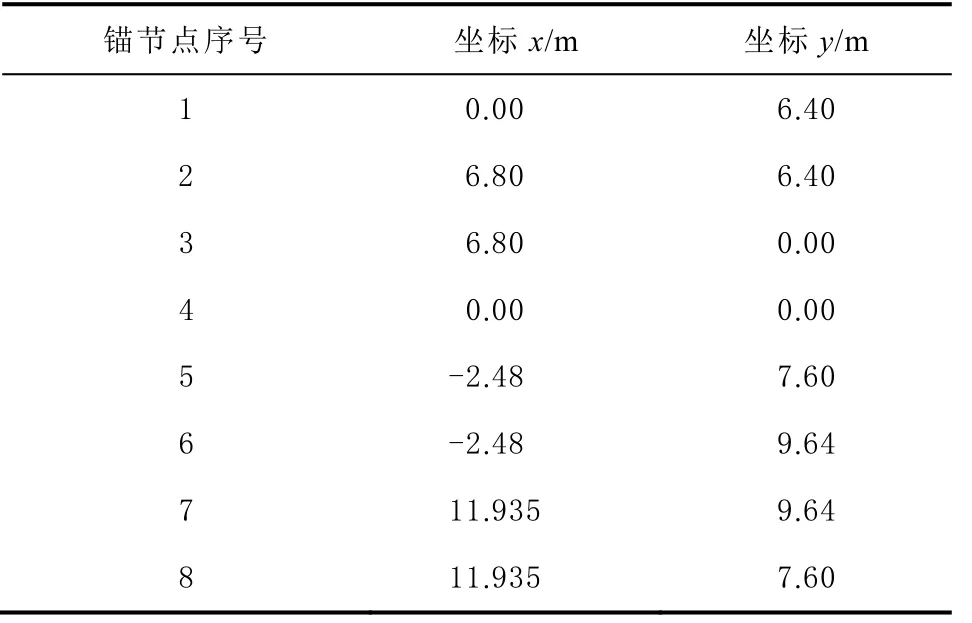
表2 錨節點坐標
參考軌跡也利用此設備進行測量,根據實際實驗環境設定路徑的關鍵點,測量其坐標,再將關鍵點依次連接形成參考軌跡,并在地面的參考路徑上粘貼黑色膠帶,實驗者按照此路徑行走進行動態定位實驗。
2.3 結果與討論
靜止狀態定位實驗在圖9 中的區域1 中進行,結果如圖10(a)所示,定位誤差如圖10(b)所示。UWB 定位系統在人員靜止狀態下定位誤差最大為0.32 m,平均定位誤差為0.16 m。靜止狀態定位誤差累積分布如圖12(a)所示。從圖12(a)可以看出,其90%的定位誤差為0.2 m。實驗環境中心誤差小、邊緣誤差大,這是因為邊緣更易受墻壁等影響,其結果與GDOP 仿真結果一致。運動狀態下人員行走軌跡如圖11 所示,其定位誤差累積分布函數(cumulative distribution function, CDF)如圖12 所示,從圖12 可以看出,采用原始UWB數據進行定位,誤差較大,其最大誤差為1.2 m。將原始數據經過卡爾曼濾波后,可以消除一些誤差比較大的定位點,在區域2 中的效果更加明顯,定位軌跡更接近原始軌跡,定位誤差也減小到0.6 m,已經可以滿足移動健康監護對于室內定位系統的精度要求。
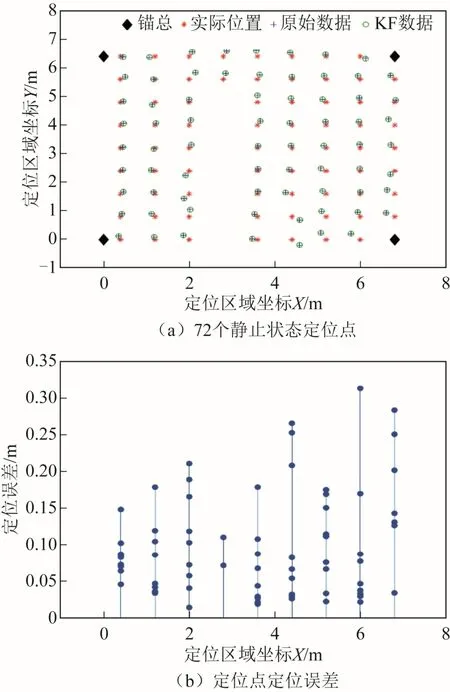
圖10 靜止狀態定位誤差實驗
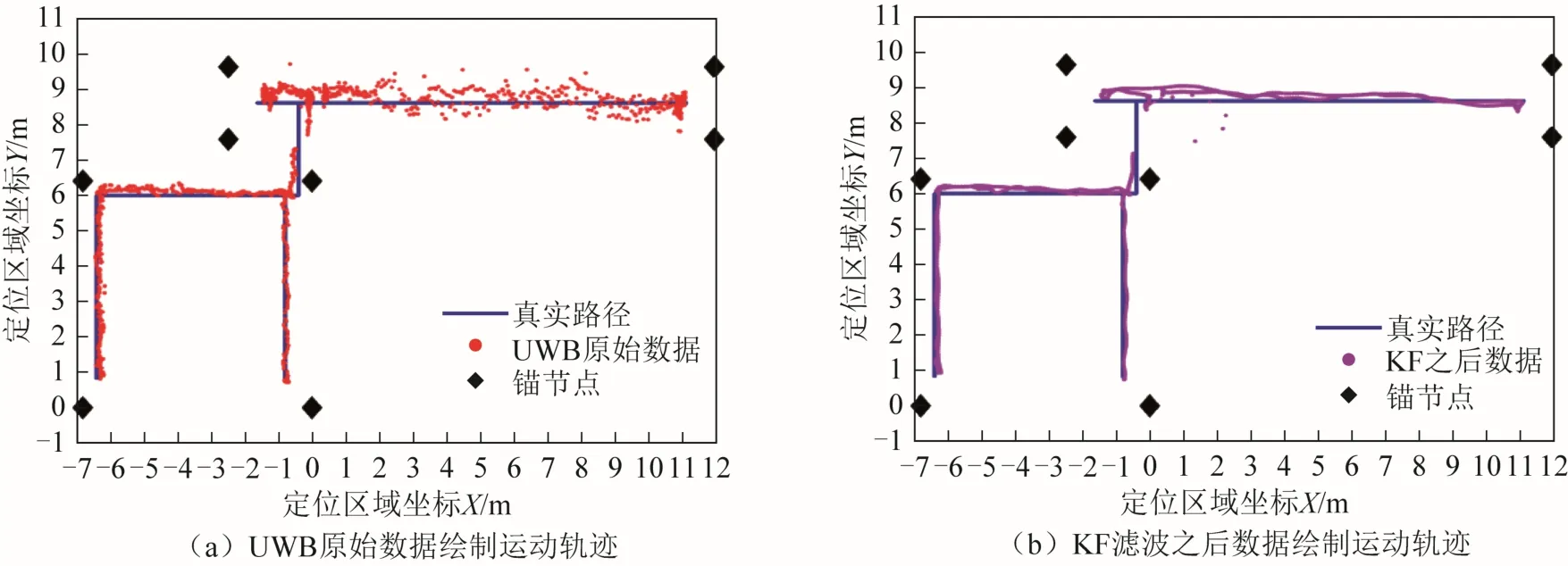
圖11 運動軌跡
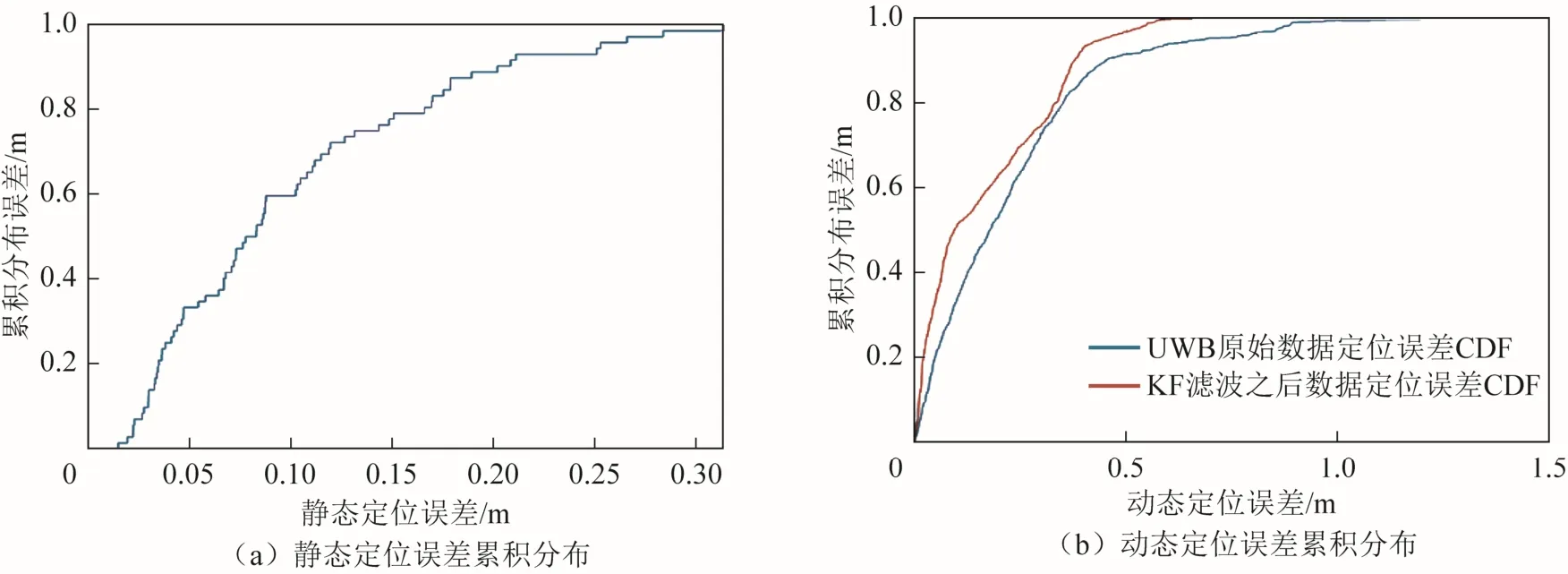
圖12 定位誤差累積分布
3 結束語
本文針對傳統移動健康監護系統缺少室內定位的問題,提出1 種用于移動健康監護的超寬帶室內定位系統設計方法,在實際環境中,依據GDOP的仿真結果部署并測試了本系統。在理論推導過程中,對傳統的SDS-TWR 測距方法進行簡化,提出DS-TWR 測距方法,減少了測距過程中消息發送的次數,提高了定位頻率,同時也減小了由于系統硬件造成的測距誤差,提高了測距精度。采用線性卡爾曼濾波器處理UWB 原始數據,可以有效地減小定位誤差。實驗結果表明:該系統可以實時檢測實驗者在室內的位置,定位頻率可達35 次/s;在室內靜止狀態下定位誤差最大為0.32 m,行走狀態下的UWB 數據經過卡爾曼濾波器后,運動軌跡更接近真實軌跡;動態定位誤差最大為0.6 m,相比于原始UWB 數據誤差減小50%。在實際樓宇環境中的測試結果表明,該系統可實現較大空間的室內定位功能,可為需要進行室內定位的場景提供參考。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
