周跳對GNSS 精密定位的影響
2021-01-05 10:57:28夏思琦于先文
導航定位學報 2020年6期
關鍵詞:影響
夏思琦,于先文
(東南大學 交通學院,南京 211189)
0 引言
載波相位是全球衛星導航系統(global navigation satellite system, GNSS)精密定位中1 個必不可少的觀測值。在對載波相位的觀測過程中,由于外界干擾或者硬件故障等原因,會造成接收機整周計數器發生中斷,從而導致載波相位觀測值發生整周跳變,這個整周跳變被稱作周跳。周跳具有傳遞性,一旦在某個歷元發生了周跳,此歷元之后的所有載波相位觀測值中均會含有該周跳。周跳是1 種常見現象,特別是當觀測環境較差時,周跳的發生會更加頻繁。
隨著GNSS 定位技術應用領域和工作環境的日益拓展,須不斷完善GNSS 精密定位數據處理方法,其中周跳的探測與修復是1 個非常重要的環節。目前已提出了多種周跳探測與修復方法,主要有高次差法[1]、多普勒觀測值法[2-3]、圖爾博·埃迪特(TurboEdit)方法[4-5]、3 頻組合周跳探測法[6-7]等。但周跳被誤探、漏探的情況仍時有發生,導致GNSS 定位結果受到較大的影響。文獻[8]指出,周跳對于GNSS 定位的影響是不能被忽略的問題,即使觀測值中只含有1 個周跳,也會對定位結果造成分米級的影響;文獻[9]以全球定位系統(global positioning system,GPS)3 差模型為基本參數模型,討論了周跳對基線向量的影響,但未對影響程度進行分析;文獻[10]提出,當觀測數據中含有周跳時,對相對定位中的雙差解會造成很大的影響,但也未給出具體的影響程度。
目前,GNSS 定位技術的應用越來越廣泛,在一些特殊環境下(城市街道、高邊坡路等)進行定位時,受多路徑等因素影響,導致周跳的發生會變得更加頻繁[11]。因此,研究周跳對定位的影響機理與程度,對完善數據處理方法具有一定的參考價值。
1 GNSS 精密定位模型
當某一歷元無周跳發生時,原始載波相位觀測方程[12]可寫成

式中:iλ 為第i 個頻率載波相位觀測值φ 的波長;ρ 為星地間的幾何距離;ρion,i為第i 個頻率載波相位觀測值φ 對應的電離層延遲;ρtro為對流層延遲; δTr、δTs分別為接收機r 和衛星s 的鐘差;c 為真空光速;mr、ms分別為接收機r 和衛星s的相位硬件延遲;N 為整周模糊度;ε 為觀測隨機誤差。
式(1)中的未知參數包括模糊度、坐標(或基線)向量,其中模糊度具有整數特性。當有多個載波觀測值時,基于式(1)可得的觀測方程為

式中:L為載波觀測值與各模型化的系統誤差之和構成的矩陣;a 為模糊度向量;b 為坐標(或基線)向量;A 和B 為已知系數矩陣;ε 為觀測隨機誤差向量。
對式(2)進行加權最小二乘估計[13],得到未知參數a 和b 的實數解向量為

相應的方差陣為


由式(6)可知,當模糊度被固定后,b 的整數解較實數解在精度方面會有很大的提高。
2 周跳的影響
2.1 周跳對實數解的影響
當有周跳發生時,式(2)可寫成

式中ΔN 為周跳向量。
同樣地,對式(7)進行加權最小二乘估計,得到未知參數a 和b 的實數解

對式(8)中的逆矩陣進行展開,可得

由式(9)可知,周跳對定位實數解帶來的系統誤差

式中Δb 為周跳對定位實數解帶來的系統誤差。
式(10)中不含隨機誤差項,故Δb 是1 個固定向量。基于式(9),可得的均方差陣

由式(11)可知,有周跳發生時定位實數解的精確度要差于無周跳發生時定位實數解的精確度,其精度損失可表示為

式中Δ1D 為周跳對定位實數解所造成的精度損失。
為了更直觀地反映周跳對定位實數解精度的影響,將方矩陣Δ1D 映射成1 個值,得到定位實數解精度損失指標

式中: tr (· )為方陣的跡;Δs 為周跳對定位實數解所造成的精度損失指標。
利用式(13)即可計算出周跳對定位實數解所造成的精度損失。
2.2 周跳對整數解的影響
當沒有周跳發生時,b 的整數解向量及相應方差陣如式(5)和式(6)所示。當周跳發生后,原來已固定的模糊度由于受到周跳影響將不能被固定,因此不能獲得定位整數解,定位結果為受污染的實數解。此時周跳對定位整數解帶來的系統偏差可表示為

式中Δb′ 為周跳對定位整數解帶來的系統偏差。

式中Δ2D 為周跳對定位整數解所造成的精度損失。
由式(15)可知,Δ2D 與具體觀測值無關且恒為正定矩陣。因此,當觀測值中含有周跳且導致模糊度無法被固定時,會對定位結果產生嚴重影響,直到模糊度再次被固定后,這種影響才會消失。
為了更方便地反映周跳對定位整數解精度的影響,將方矩陣Δ2D 映射成1 個值,可得精度損失指標

式中Δz 為周跳對定位整數解所造成的精度損失指標。
3 實驗與結果分析
3.1 實驗數據
本算例采用的實驗數據來源于2018 年1 月16日,南京1 條18 km 左右的基線,測站名分別為MAQN 和JNNF。接收機型號為Trimble NetR9,采樣間隔1 s,衛星截止高度角設為15°。利用2 個觀測站長期連續觀測數據解算得到該基線向量準確值,并將該準確值作為向量坐標真值。利用定位軟件對該組數據進行相對定位解算,將獲得的基線向量整數解坐標與向量坐標真值作差,得到的坐標真誤差情況如圖1 所示。
從圖1 可以看出,3 個方向的誤差變化整體平緩且坐標真誤差均在0.005 m 附近波動。說明該組數據中無周跳發生。因此采用該組無周跳的觀測數據分別進行小周跳、大周跳、連續周跳對定位影響的實驗。
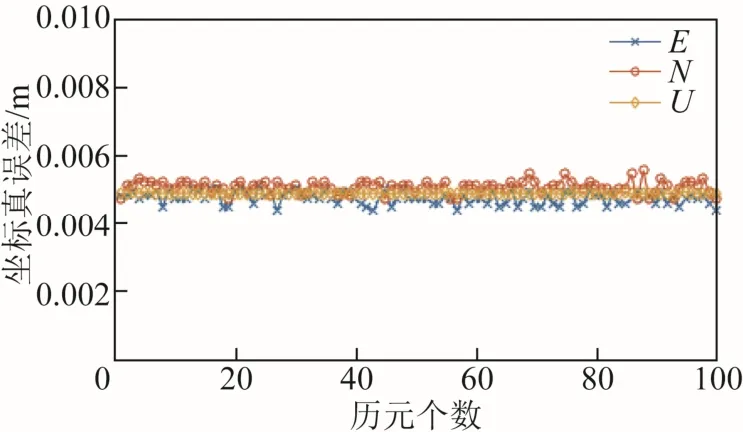
圖1 無周跳時定位結果
3.2 小周跳的影響
為了分析小周跳對定位的影響程度。在MAQN 觀測站的第5 個歷元處,G05 號衛星L1 頻點上的載波相位觀測值中加入1 個周跳,由于周跳的繼承性,之后L1 所有歷元的載波相位觀測值中都將包含1 個周跳。利用定位軟件重新對該條基線數據進行相對定位解算,獲得的G05 號衛星L1 頻點上的整周模糊度情況如圖2 所示。

圖2 模糊度變化情況(1 個周跳)
從圖2 中可以看出,在加入周跳前,模糊度的整數解為218 976 個周期,加入1 個周跳后的一段時間內,模糊度變為了實數解,在218 977 個周期附近震蕩,說明隨著歷元的增加,周跳逐漸被吸收至模糊度中。從第15 個歷元開始,模糊度才重新被固定。
將利用軟件解算得到的基線向量與向量坐標真值作差,結果如圖3 所示。從圖3 中可以看出,在第5 個歷元處的東(E)、北(N)、天(U)方向坐標真誤差在0.15 m 左右。而從第15 個歷元開始,模糊度重新被固定,E、N、U 方向的坐標真誤差也回到0.005 m 附近波動。

圖3 加入周跳后定位結果
表1 為在第5~14 個歷元,基于式(16)計算各歷元的精度損失指標 Δz 。

表1 第5~15 個歷元精度損失指標
由表1 可知,在第5 個歷元處, Δz 達到了0.678 m,可知周跳對定位會產生較大的影響。隨著歷元的增加逐漸減小,直到第15 個歷元模糊度被重新固定后, Δz 變為0 m。
3.3 大周跳影響
為了分析大周跳對定位的影響程度,同樣在MAQN 觀測站的第5 個歷元處,G05 號衛星L1頻點上的載波相位觀測值中產生了10 個周跳,由于周跳的繼承性,之后L1 所有歷元的載波相位觀測值中都將包含10 個周跳。利用定位軟件重新對該條基線數據進行相對定位解算,獲得的G05 號衛星L1 頻點上的整周模糊度情況如圖4所示。
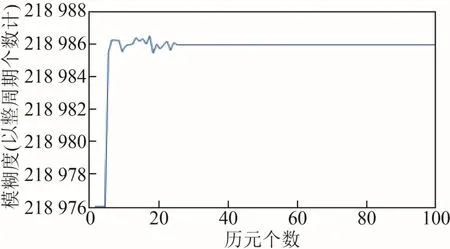
圖4 模糊度變化情況(10 個周跳)
從圖4 中可以看出,在加入周跳前,模糊度的整數解依舊為218 976 個周期,加入周跳后一段時間內,模糊度不能被固定,直至第25 個歷元,模糊度才重新被固定。
將利用軟件解算得到的基線向量與向量坐標真值作差,結果如圖5 所示。從圖5 中可以看出,在第5 個歷元處的E、N、U 方向坐標真誤差在1~2 m。而從第25 個歷元開始,模糊度重新被固定,E、N、U 方向的坐標真誤差也回到0.005 m附近波動。
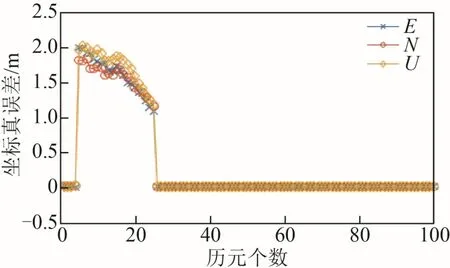
圖5 加入周跳后定位結果
用第5~26 個歷元處的數據,基于式(16)計算處各歷元的精度損失指標 Δz ,其結果如表2所示。
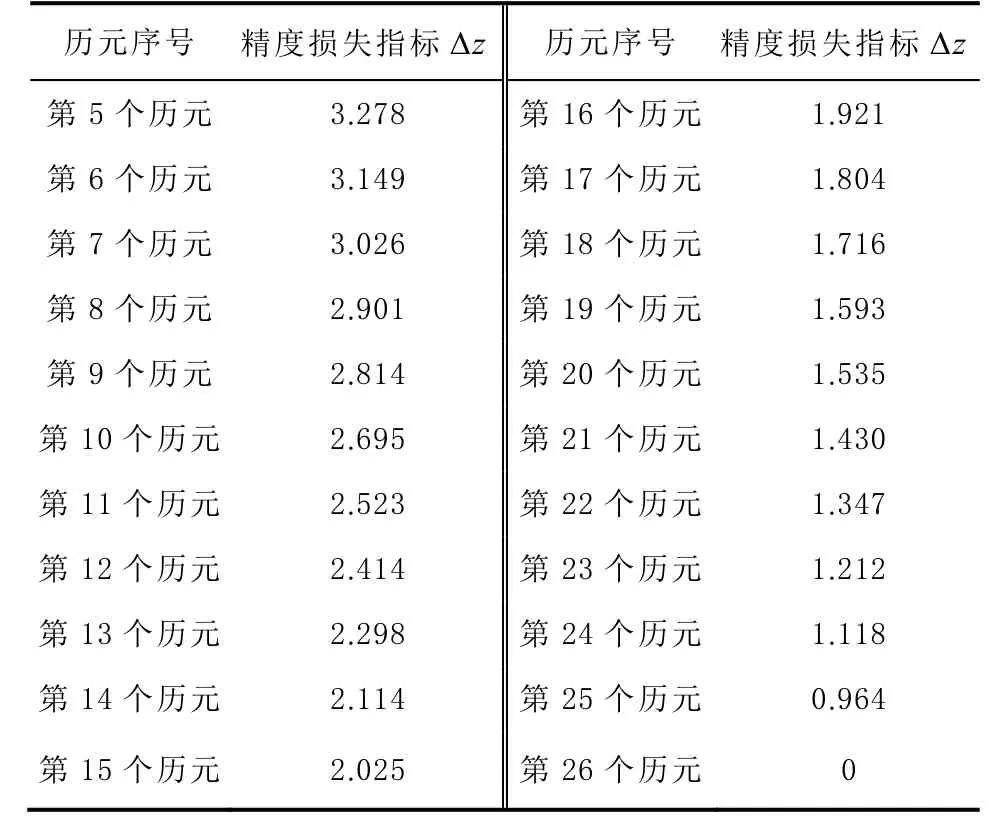
表2 第5~26 個歷元精度損失指標
由表2 可知,在第5 個歷元處,Δ z 達到了3.278 m,可知周跳對定位會產生較大的影響。隨著歷元的增加逐漸減小,直到第26 個歷元模糊度被重新固定后, Δz 變為0 m。
3.4 連續周跳對定位影響
為了分析連續周跳對定位的影響程度,在MAQN 測站的第5 個、第8 個歷元處,G05 號衛星L1 頻點上的載波相位觀測值中分別產生了1 個周跳。利用定位軟件重新對該條基線數據進行相對定位解算,獲得的G05 號衛星L1 頻點上的整周模糊度情況如圖6 所示。
從圖6 中可以看出,在加入周跳前,模糊度的整數解依舊為218 976 個周期,在第5 個歷元加入周跳后,模糊度不能被固定。在第8 個歷元加入周跳后,模糊度進一步受到影響,仍不能被固定。直至第18 個歷元,模糊度才重新被固定。
將利用軟件解算得到的基線向量與向量坐標真值作差結果如圖7 所示。

圖6 模糊度變化情況(連續周跳)
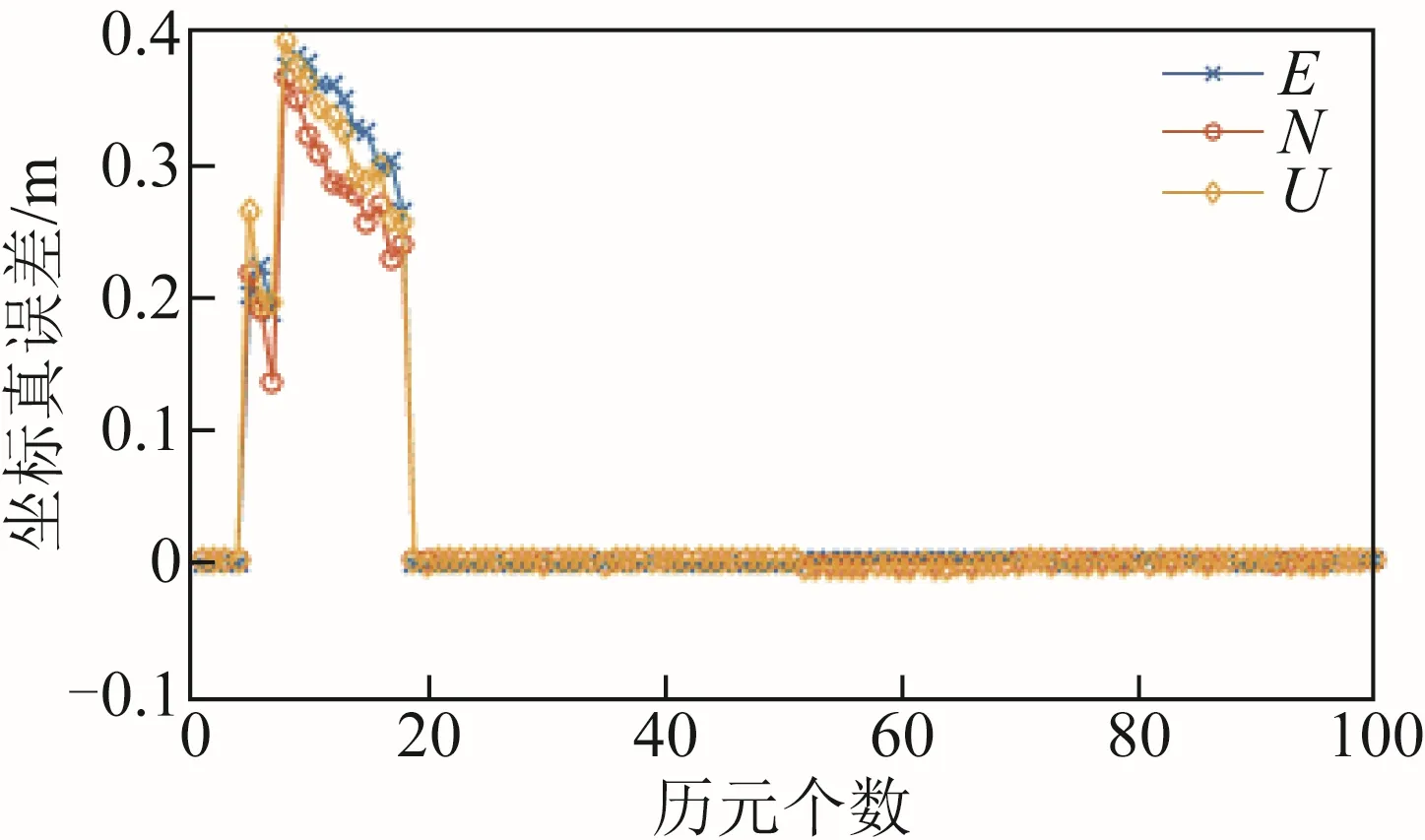
圖7 加入周跳后定位結果
從圖7 中可以看出,在第5 個歷元處的E、N、U 方向坐標真誤差在0.2 m 左右。隨著歷元的增加,周跳逐漸被吸收至模糊度中,坐標真誤差逐漸減小。由于在第8 個歷元處又有了1 個周跳的產生,E、N、U 方向坐標真誤差重新達到了0.3 m 左右。隨著歷元的增加,坐標真誤差繼續逐漸減小,從第19 個歷元開始,E、N、U 方向的坐標真誤差也回到0.005 m 附近波動。
利用第5~19 個歷元的觀測數據,基于式(16)計算出各歷元的精度損失指標 Δz ,其結果如表3 所示。

表3 第5~19 個歷元精度損失指標
由表3 可知,在第3 個歷元處, Δz 達到了0.686 m,之后隨著歷元的增加逐漸減小,由于在第8 個歷元處重新出現了1 個周跳, Δz 又重新達到了0.806 m,之后再次隨著歷元的增加逐漸減小,直到第19 個歷元模糊度被重新固定后,Δ z 變為0 m。
4 結束語
本文首先給出了GNSS 精密定位模型;然后推導了周跳對定位實數解和定位整數解的影響程度計算公式,并根據方差陣分析了相應的精度損失;最后通過對人為加入大、小、連續周跳到觀測數據中,重新進行定位解算,將得到定位結果與無周跳觀測數據的定位結果相互之間進行對比,可得到如下結論:①周跳發生之后,模糊度被重新固定所需的歷元個數與周跳的大小有關,一般周跳值越大,模糊度重新固定所需的歷元個數越多;②當發生連續周跳時,對定位的影響程度會出現疊加現象,模糊度被重新固定所需的歷元個數將會增多。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
家庭影院技術(2020年10期)2020-12-14 07:54:18
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
知識經濟·中國直銷(2016年3期)2016-02-27 16:15:49
現代檢驗醫學雜志(2014年6期)2014-02-02 03:02:04
閱讀與作文(小學低年級版)(2011年3期)2011-01-01 00:00:00
