機(jī)械手執(zhí)行器的計(jì)算機(jī)控制系統(tǒng)建模與仿真
2021-01-05 07:06:42張繼紅
關(guān)鍵詞:計(jì)算機(jī)系統(tǒng)
張繼紅
(四川職業(yè)技術(shù)學(xué)院 機(jī)械工程系,四川 遂寧 629000)
0 引言
機(jī)械手要順利完成工作,需要機(jī)器人控制系統(tǒng)完成對(duì)機(jī)械手臂的各關(guān)節(jié)及末端執(zhí)行器電機(jī)的力、加速度、位姿等的控制[1]。計(jì)算機(jī)控制的位置伺服系統(tǒng)在工作中發(fā)揮了很大的作用。設(shè)計(jì)了一種機(jī)械手末端執(zhí)行器的計(jì)算機(jī)控制的位置伺服系統(tǒng),由計(jì)算機(jī)控制系統(tǒng)的采樣系統(tǒng)理論,設(shè)計(jì)時(shí)對(duì)數(shù)字控制系統(tǒng)分析計(jì)算。建立了該系統(tǒng)的動(dòng)態(tài)數(shù)學(xué)模型,運(yùn)用計(jì)算機(jī)仿真程序進(jìn)行仿真并優(yōu)化設(shè)計(jì)系統(tǒng)結(jié)構(gòu)和主要技術(shù)參數(shù)。
1 末端執(zhí)行器的計(jì)算機(jī)控制系統(tǒng)組成
末端執(zhí)行器的計(jì)算機(jī)控制系統(tǒng)采用工業(yè)控制計(jì)算機(jī)[2],由于計(jì)算機(jī)輸出的是數(shù)字信號(hào),需要經(jīng)D/A 轉(zhuǎn)換送給伺服功率放大器,再驅(qū)動(dòng)直流電動(dòng)機(jī)通過(guò)摩擦傳動(dòng)帶動(dòng)執(zhí)行器動(dòng)端移動(dòng),轉(zhuǎn)軸上安裝光電編碼器,能把編碼器的角度信號(hào)送入計(jì)算機(jī)完成位置反饋。
2 機(jī)械手的末端執(zhí)行器結(jié)構(gòu)設(shè)計(jì)
末端執(zhí)行器的結(jié)構(gòu)[3],如圖1 所示。該結(jié)構(gòu)是一個(gè)控制電機(jī)驅(qū)動(dòng)的摩擦傳動(dòng)鏈。設(shè)計(jì)的技術(shù)參數(shù)分別為:抓取物品直徑小于0.2 米,其重量在2.0 公斤一下,動(dòng)態(tài)性能是超調(diào)量小于15%,靜態(tài)精度0.15 毫米夾鉗式機(jī)械手末端執(zhí)行器結(jié)構(gòu)。具體方案為伺服電動(dòng)機(jī)驅(qū)動(dòng)摩擦輪,在摩擦力作用下帶動(dòng)夾鉗移動(dòng)端作直線運(yùn)動(dòng),在夾持時(shí)起到一定的保護(hù)作用。
3 末端執(zhí)行器的計(jì)算機(jī)控制系統(tǒng)建模
連續(xù)控制系統(tǒng)通常用微分方程及S 域傳遞函數(shù)兩種數(shù)學(xué)模型來(lái)表達(dá),用相應(yīng)古典控制理論分析計(jì)算。而離散控制系統(tǒng)或計(jì)算機(jī)數(shù)字控制系統(tǒng)可用差分方程,Z 域脈沖傳遞函數(shù)描述,并分析和設(shè)計(jì)。
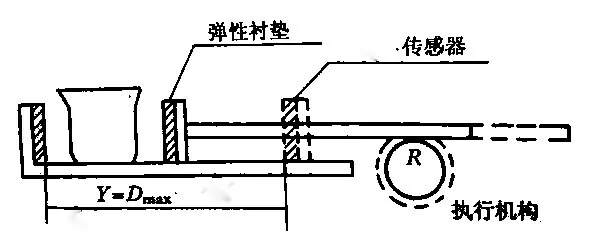
圖1 末端執(zhí)行器結(jié)構(gòu)
即是連續(xù)控制系統(tǒng)通常將時(shí)域的微分方程經(jīng)過(guò)L 變換為S 域的代數(shù)方程求解,用龍格庫(kù)塔算法進(jìn)行數(shù)字計(jì)算;那么離散控制系統(tǒng)是將時(shí)域的差分方程經(jīng)過(guò)Z 變換為Z 域的代數(shù)方程計(jì)算。
3.1 計(jì)算機(jī)控制系統(tǒng)的脈沖傳遞函數(shù)
如圖2 所示的數(shù)字控制系統(tǒng)的脈沖傳遞函數(shù)[4]定義:在線性離散系統(tǒng)中并且是零初始條件,那么輸出脈沖序列的Z 變換與輸入脈沖序列的Z變換之比。表示為:
由于脈沖傳遞函數(shù)的推導(dǎo)要用到脈沖響應(yīng)函數(shù),線性定常連續(xù)系統(tǒng)有:
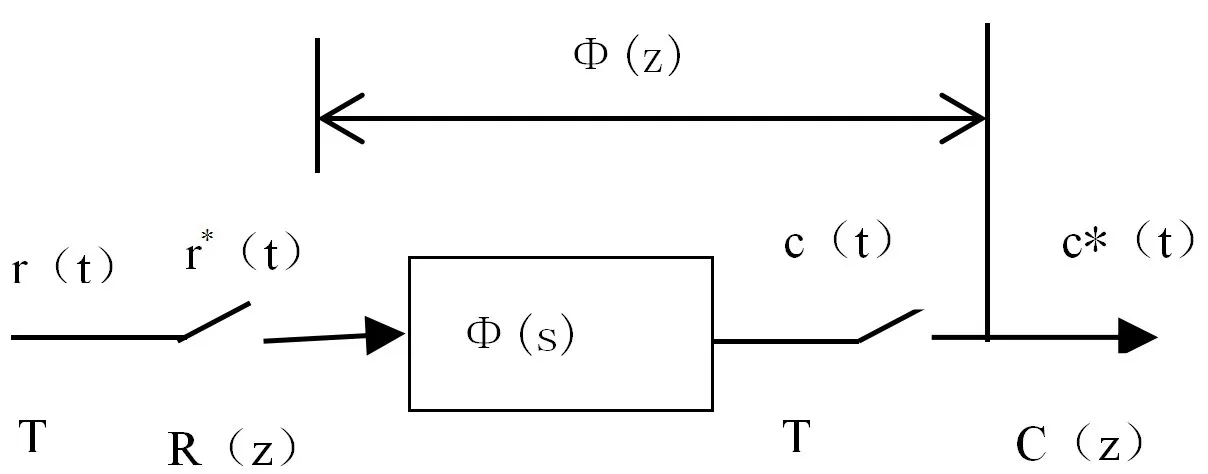
圖2 脈沖傳遞函數(shù)框圖
令R(s)=1,則采樣系統(tǒng)的脈沖響應(yīng)函數(shù)為:

圖3 是一個(gè)采樣開(kāi)關(guān)在誤差通道的離散系統(tǒng)。
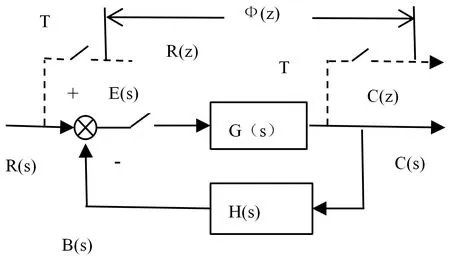
圖3 采樣開(kāi)關(guān)在誤差通道的離散系
經(jīng)推導(dǎo)其數(shù)字控制系統(tǒng)的脈沖傳遞函數(shù)為:

3.2 機(jī)械手伺服控制系統(tǒng)數(shù)學(xué)模型
夾鉗末端執(zhí)行器通常采用直流電機(jī)伺服控制系統(tǒng)完成活動(dòng)鉗口的運(yùn)動(dòng),原理如圖4 所示。
該機(jī)電系統(tǒng)的動(dòng)力學(xué)模型可以根據(jù)機(jī)械網(wǎng)絡(luò)的達(dá)朗貝爾平衡原理,空間連續(xù)律以及電氣網(wǎng)絡(luò)的基爾霍夫電壓定律,電流定律建立:
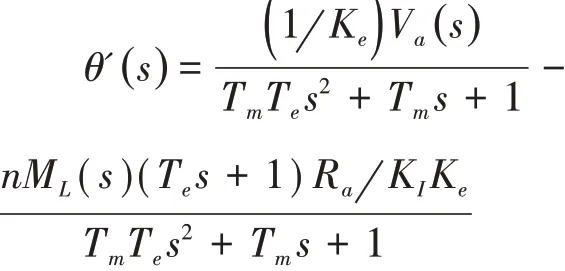
式中:Ke為反電動(dòng)勢(shì)常量,n 為傳動(dòng)比,Tm為機(jī)電時(shí)間常量,Te為電樞回路常量。其余物理量見(jiàn)圖。
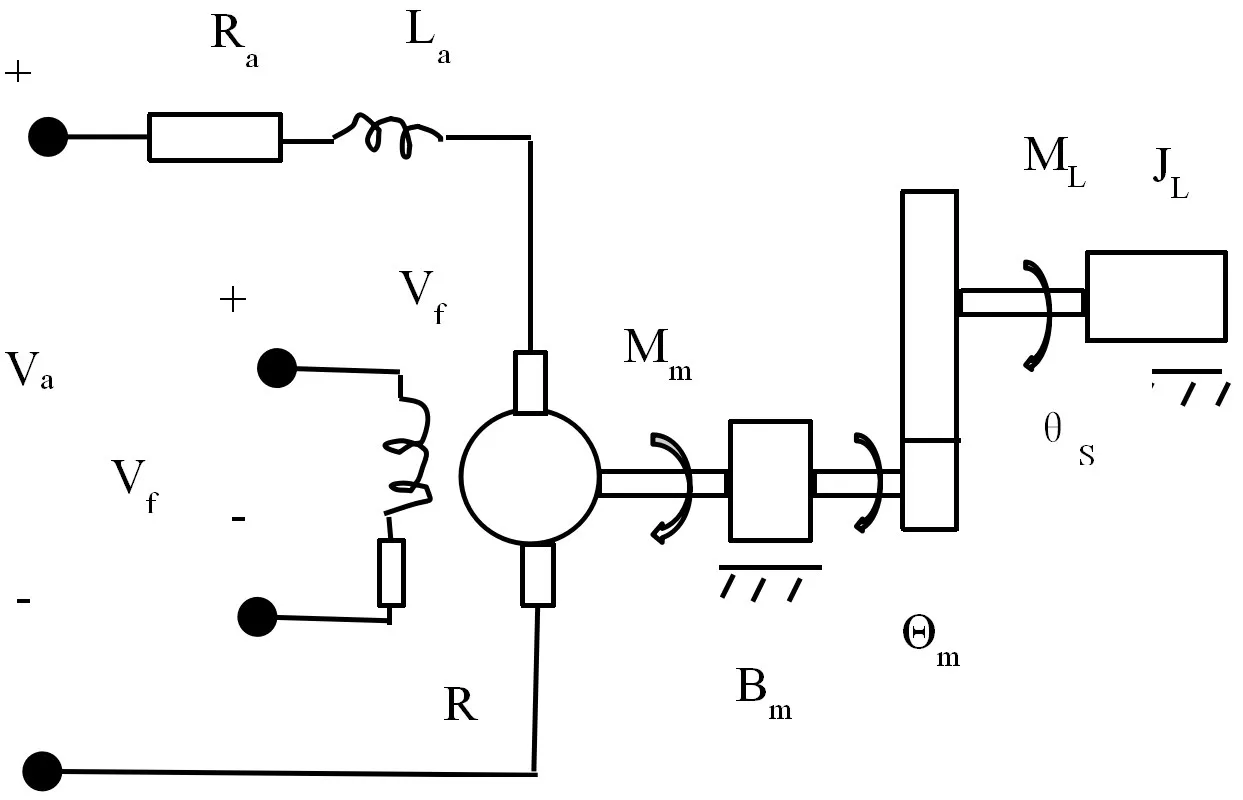
圖4 伺服控制系統(tǒng)
3.3 機(jī)械手計(jì)算機(jī)控制系統(tǒng)的數(shù)學(xué)模型
夾鉗式末端執(zhí)行器工作時(shí)要對(duì)動(dòng)鉗口的加速,減速,移動(dòng)的位移及夾緊力等進(jìn)行控制。系統(tǒng)框圖如圖5 所示:D(z)為數(shù)字機(jī),即數(shù)字濾波器,對(duì)控制系統(tǒng)動(dòng)態(tài)系統(tǒng)進(jìn)行校正,使計(jì)算機(jī)控制系統(tǒng)滿足動(dòng)態(tài)性能指標(biāo)要求,又叫數(shù)字控制器,是系統(tǒng)的核心。數(shù)控機(jī)床中采用的控制器為數(shù)字PID 控制器,或者P,I,D 它們之間的不同組合來(lái)完成控制。D∕A 數(shù)模轉(zhuǎn)換器一般用零階保持器ZOH 來(lái)完成計(jì)算恢復(fù)信號(hào)的狀態(tài)。
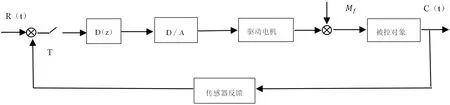
圖5 計(jì)算機(jī)控制系統(tǒng)
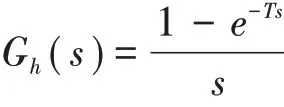
零階保持器的傳遞函數(shù)是:
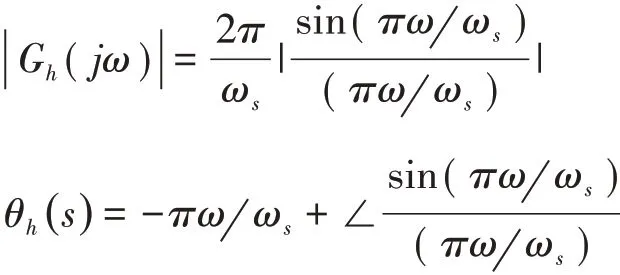
它的頻率特性為:
T 理想采樣開(kāi)關(guān),滿足香農(nóng)定理。
一個(gè)理想的帶零階保持器ZOH 的單位負(fù)反饋計(jì)算機(jī)控制系統(tǒng)如圖6 所示:
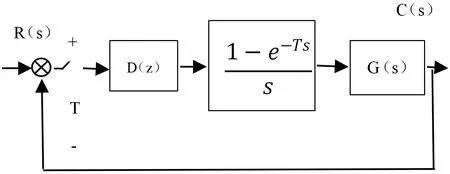
圖6 單位負(fù)反饋計(jì)算機(jī)控制系
機(jī)械手末端控制器的計(jì)算機(jī)控制系統(tǒng)根據(jù)設(shè)計(jì)的總體結(jié)構(gòu)以及各元器件相應(yīng)參數(shù),得出采樣控制系統(tǒng)的框圖如圖7 所示。
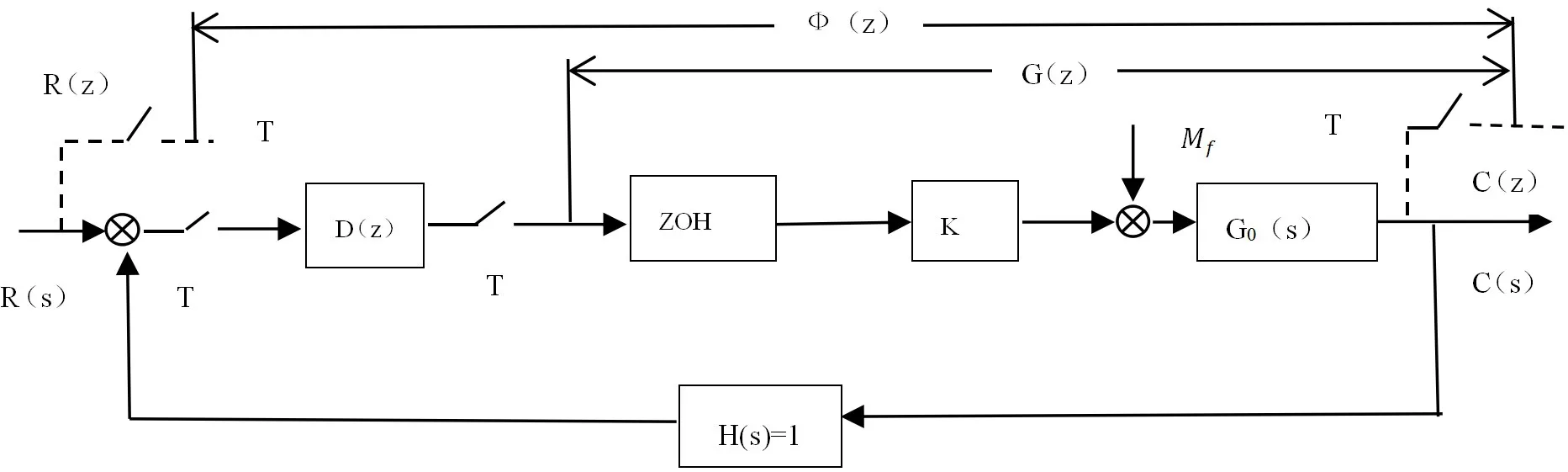
圖7 末端控制器采樣系統(tǒng)框圖
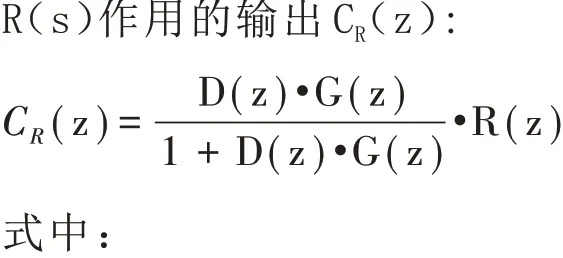
由閉環(huán)采樣系統(tǒng)的脈沖傳遞函數(shù)法則可以推導(dǎo)在干擾作用下末端控制器的計(jì)算機(jī)控制系統(tǒng)脈沖輸出函數(shù)C(z)。
根據(jù)線性系統(tǒng)的疊加原理,可以分別求出輸入R(s)作用產(chǎn)生的輸出CR(z)和擾動(dòng)N(s)作用產(chǎn)生的輸出CN(z)。
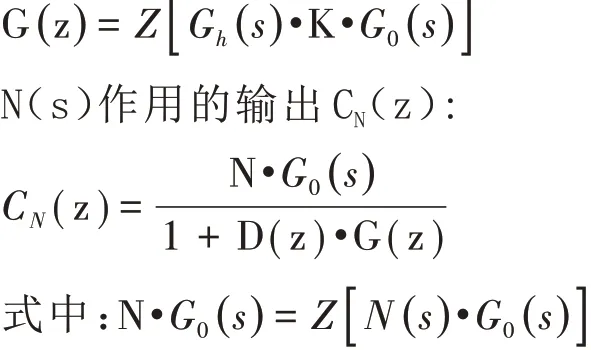
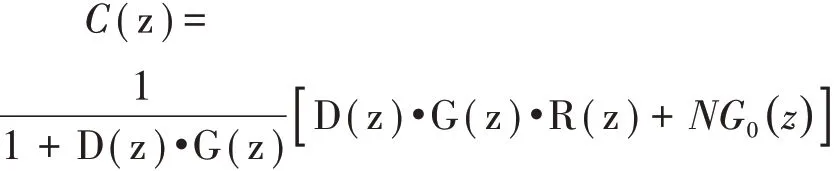
疊加得系統(tǒng)總輸出C(z)的數(shù)學(xué)模型:
該計(jì)算機(jī)控制系統(tǒng)模型中D(z)為數(shù)字PID 控制器[5],G(z)包含有零階保持器ZOH 和機(jī)電控制系統(tǒng)傳遞函數(shù)G0(s) ,以及比例系數(shù)K。
4 機(jī)械手計(jì)算機(jī)控制系統(tǒng)仿真
運(yùn)用計(jì)算機(jī)控制系統(tǒng)的仿真程序SIMU 對(duì)機(jī)械手末端控制系統(tǒng)進(jìn)行仿真[6]。該程序能對(duì)兩種結(jié)構(gòu)的計(jì)算機(jī)控制系統(tǒng)進(jìn)行仿真。其中D(z)是數(shù)字控制器,G(s)是連續(xù)控制對(duì)象,G(z)是離散控制對(duì)象。系統(tǒng)輸入可以為階躍函數(shù),斜坡函數(shù)或者拋物線函數(shù)。對(duì)于階躍輸入可以算出動(dòng)態(tài)指標(biāo):超調(diào)量,上升時(shí)間及調(diào)節(jié)時(shí)間。按照程序的屏幕提示選擇和輸入有關(guān)數(shù)據(jù),可打印仿真的結(jié)果數(shù)據(jù)和圖形。該系統(tǒng)有:

采樣周期T=0.05 秒。仿真結(jié)果輸出如圖8。
5 結(jié)論
計(jì)算機(jī)在工業(yè)控制中的應(yīng)用越來(lái)越廣,文章對(duì)末端控制器的計(jì)算機(jī)控制系統(tǒng)進(jìn)行建模,利用SIMU 程序進(jìn)行仿真。得到控制器D(Z)和計(jì)算機(jī)控制系統(tǒng)在輸入R(S)下的時(shí)間響應(yīng)。仿真的結(jié)果表明選擇系統(tǒng)的參數(shù)匹配[7],滿足設(shè)計(jì)動(dòng)態(tài)特性要求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:42
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
趣味(數(shù)學(xué))(2020年9期)2020-06-09 05:35:08
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2017年20期)2018-01-03 06:26:40