反空空導彈彈道及攔截區解算研究
2021-01-06 04:00:56胡朝暉
彈道學報 2020年4期
關鍵詞:飛機
胡朝暉,呂 躍
(1.西京學院 機械工程學院,陜西 西安 710123;2.空軍工程大學 航空工程學院,陜西 西安 710038)
在空戰過程中,當自衛飛機發現遭到空空導彈攻擊后,可通過機動規避飛行和電子干擾等自衛手段,擺脫導彈的攻擊。在機載武器裝備快速發展的今天,作戰飛機受到的威脅與日俱增,特別是隨著隱身空戰時代的到來,空戰中被鎖定的戰機將更難于擺脫導彈的攻擊。為此,一些國家和學者提出了自衛飛機發射空空導彈攔截來襲空空導彈的設想,旨在采用積極的自衛手段,提高自衛飛機的生存能力。美軍啟動的“CUDA”迷你導彈項目,就是在未來專門攔截來襲的空空導彈,俄軍也稱其新型中程空空導彈K-77M能夠全向攔截各型對空來襲導彈[1-4]。
因此,對反空空導彈的攔截特性及其攔截區的研究具有非常重要的意義。文中建立了來襲導彈攻擊自衛飛機和反空空導彈攔截來襲導彈的空戰仿真平臺,在典型空戰條件下,進行了反空空導彈攔截來襲空空導彈的彈道仿真,并對反空空導彈的攔截區進行了計算,對攔截區的影響因素進行了分析。
1 反空空導彈攔截原理分析
如圖1所示,在來襲導彈進入反空空導彈的攔截區后,發射反空空導彈攔截來襲導彈是一種重要的積極自衛手段。
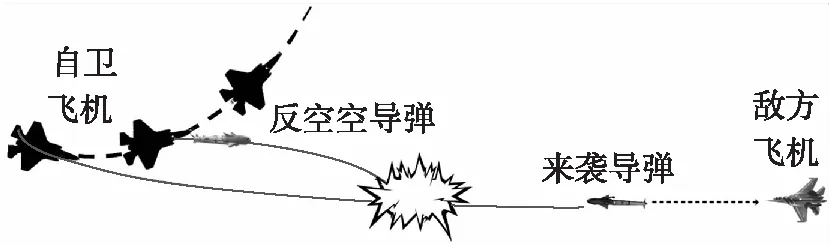
圖1 反空空導彈對來襲導彈的攔截過程
通過分析可以發現,反空空導彈和空空導彈的區別非常大,主要體現在:
①攻擊目的不同。空空導彈重點在于“攻”,其首要任務是擊落敵機,而反空空導彈重點在于“防”,保護自衛飛機,提高載機的生存力。
②目標反制措施不同。空空導彈攻擊的飛機目標會通過各種機動規避措施和電子對抗手段干擾空空導彈的攻擊,而來襲導彈目標沒有反制機動能力,只根據自衛飛機的運動情況,按照引導規律一直朝向自衛飛機機動飛行。
③目標速度特征不同。空空導彈一般只攔截馬赫數在2.5以下的空中目標,而反空空導彈需要攔截馬赫數可達4以上的來襲空空導彈,且基本是迎頭攻擊,要具備一定的高速目標攔截能力。
④目標探測特征不同。來襲導彈飛行時發動機不是全程工作的,但由于速度較高,蒙皮是其主要紅外輻射源,而飛機的發動機一直工作,其尾噴口和尾焰紅外輻射是其主要輻射源。來襲導彈目標的雷達反射截面積(RCS)大致相當于隱身飛機大小,而飛機目標的RCS從隱身飛機的0.01 m2到大飛機的幾十平米。
綜上分析,自衛飛機要成功攔截來襲導彈,首先要對來襲空空導彈有一定的探測能力,即在一定的距離能夠發現、跟蹤和瞄準來襲空空導彈,同時發射的反空空導彈也具有探測跟蹤紅外小目標或者隱身目標的能力。得益于機載武器裝備的快速發展,一些作戰飛機可通過裝備光電分布式孔徑系統(EOTAS)探測來襲導彈,并引導光電跟蹤瞄準系統(IRST)或者機載有源相控陣雷達穩定跟蹤空空導彈。
2 反空空導彈攔截建模
反空空導彈本質上仍是空空導彈,要研究其是否能夠實現攔截導彈任務,需要建立來襲導彈攻擊自衛飛機和反空空導彈攔截來襲導彈兩部分模型。為使攔截區概念更直觀清晰,對來襲空空導彈攔截區的解算應以自衛飛機為中心解算,并綜合分析自衛飛機、反空空導彈和來襲導彈參數變化對攔截區的大小和形狀的影響,為自衛飛機火控系統實現反空空導彈發射控制提供數據支撐。
為簡化計算,仿真平臺采用標準大氣計算氣動參數,并設空戰在同一水平面發生,來襲導彈為敵方飛機發射的中距空空導彈,反空空導彈為改進的紅外近距格斗導彈。
2.1 坐標系的建立
為實現反空空導彈的彈道仿真,需要建立相應的坐標系。
①取敵方飛機在攻擊區內發射來襲導彈的瞬間為坐標原點O,建立地理坐標系Oxz,令Ox為發射導彈瞬間敵方飛機和自衛飛機的連線。
②取自衛飛機發射反空空導彈的瞬間位置為坐標原點O1,建立反空空導彈地理坐標系O1x1z1,取O1x1軸為發射導彈瞬間自衛飛機和來襲導彈的連線。
圖2為基于來襲導彈和反空空導彈的2個地理坐標系。圖中,d1為自衛飛機探測跟蹤來襲導彈的最大距離,d0為來襲導彈的發射距離。
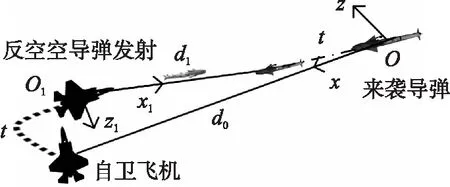
圖2 來襲導彈及反空空導彈的地理坐標系
為實現自衛飛機、來襲導彈和反空空導彈三者之間的坐標系關聯,需要確定Oxz和O1x1z1的平移和旋轉關系[5],如圖3所示,則來襲導彈在地理坐標系O1x1z1的位置坐標為
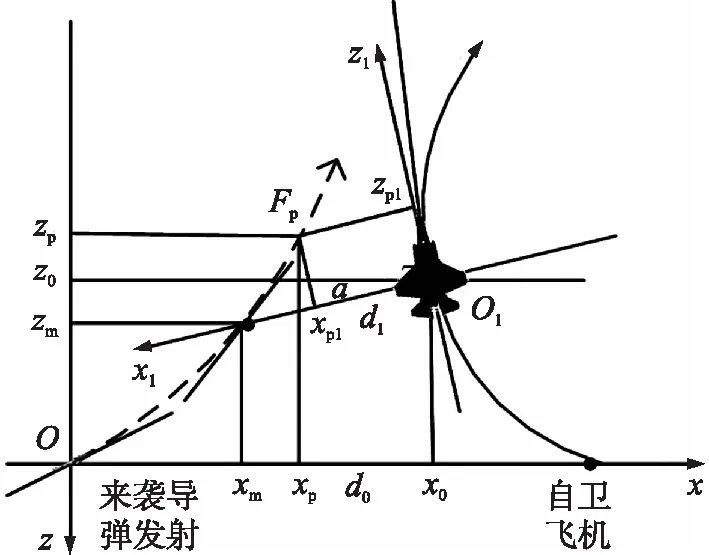
圖3 兩坐標系的轉換
(1)
式中:x0和z0為原點O1在地理坐標系Oxyz中的坐標。
2.2 自衛飛機的運動模型
自衛飛機在水平面內實施機動飛行,其飛行速度大小保持不變,只可改變飛行方向,這樣自衛飛機就可以實施勻速直線、勻速轉彎和置尾機動等規避運動。自衛飛機在地理坐標系O1x1z1的位置為
(2)
式中:d為自衛飛機和來襲導彈的距離;ψf為自衛飛機的偏航角,其初值稱為目標進入角,當已知自衛飛機的過載n和速度vf時,可計算自衛飛機的偏航角變化率為
(3)
式中:g為重力加速度。
2.3 來襲導彈的運動模型
來襲導彈要計算從d0開始的整個飛行速度變化,并按照比例引導律機動攻擊自衛飛機。
①來襲導彈的速度模型。
(4)
式中:m為導彈的質量;vm0為敵方飛機速度;Fp為來襲導彈的推力,任意高度的導彈推力可根據海平面推力、發動機總沖、燃料消耗率和每牛頓推力的燃料消耗量等參數修正計算;Cx為導彈阻力系數;S為導彈氣動參考面積;pd為動壓。
②來襲導彈的比例引導律[6-8]。
(5)
式中:θ為來襲導彈速度矢量與坐標軸Z的夾角;q為目標視線角。
③來襲導彈和自衛飛機的距離。
(6)
2.4 反空空導彈彈道仿真建模
①反空空導彈動力學方程。
(7)
式中:m1為導彈質量;Fp1為反空空導彈發動機推力;Fx1為軸向阻力;v1為反空空導彈速度。反空空導彈的推力、氣動阻力和法向力為
(8)
式中:Q為發動機總沖;Ca為彈體軸向阻力系數;S1為導彈氣動參考面積;pd為動壓;Fz1為法向力;Cnd為法向力系數。
②反空空導彈與來襲導彈相對運動模型。
(9)
式中:xm1和zm1為反空空導彈與來襲導彈目標相對位置在地理坐標系O1x1z1的分量;dm1為距離;ψG為偏航方向上的跟蹤角。
③反空空導彈的制導模型。
反空空導彈的制導分為2個階段:初始段和末制導段。初始段導彈不制導,完成導彈的引信解除保險,并安全脫離自衛飛機。末制導段采用比例導引規律制導:
(10)
式中:qG為跟蹤線相對于偏航方向的旋轉角速度;nz為導彈法向過載分量;az,vd為所需法向加速度分量。
④反空空導彈的運動模型。
(11)
式中:x1,z1為反空空導彈的坐標;v1為反空空導彈的速度;ψc為導彈航跡偏轉角。
2.5 空戰仿真平臺的搭建
空戰仿真平臺由反空空導彈攻擊來襲導彈的彈道仿真模塊和來襲導彈攻擊自衛飛機模塊組成,具體結構如圖4所示。

圖4 空戰仿真平臺結構框圖
仿真前要設置空戰高度、自衛飛機速度及過載、自衛飛機對來襲導彈的最大跟蹤距離、反空空導彈發射前置角、反空空導彈發射時間、來襲導彈的發射距離、自衛飛機目標進入角、來襲導彈發射前置角、敵方飛機速度等參數,并讀入來襲導彈和反空空導彈的具體參數。
對于反空空導彈,當存在以下狀態時導彈失控,不能完成對應攔截攻擊任務:
①導彈速度低于最小可控馬赫數;
②導彈飛行時間超過最大可控時間;
③彈目接近速度低于最小接近速度;
④視場限制導引頭丟失跟蹤目標;
⑤跟蹤角速度限制導引頭丟失跟蹤目標;
⑥彈目接近速度大于最大相對速度限制。
當自衛飛機提前進入來襲導彈引信作用域時,來襲導彈毀傷自衛飛機,反空空導彈攔截失敗;當來襲導彈提前進入反空空導彈引信作用域時,反空空導彈毀傷來襲導彈,攔截成功。
2.6 反空空導彈的攔截區解算
反空空導彈攔截區[9~11]的計算步驟如下:
①步驟1。針對來襲導彈目標特征,計算自衛飛機對來襲導彈最大探測范圍,此為反空空導彈的遠邊界。
②步驟2。設置自衛飛機的高度、速度、機動方式,初始化來襲導彈和反空空導彈的各項參數。
③步驟3。來襲導彈在其攻擊區內發射,開始彈道仿真,當距離小于自衛飛機可探測范圍時,發射反空空導彈開始彈道仿真,并判斷來襲導彈和反空空導彈的攻擊狀態,若反空空導彈首先命中目標,則減小反空空導彈發射距離,直至來襲導彈提前命中自衛飛機,得到反空空導彈最小發射距離。
④步驟4。改變反空空導彈發射前置角,重新計算步驟3。
⑤步驟5。在反空空導彈發射前置角范圍內,計算得到反空空導彈最小發射距離的集合,即為攔截區的近邊界。
3 仿真計算
仿真條件:設在3 km高度空戰,自衛飛機可進行勻速直線運動或以5g過載進行勻速轉彎機動。當敵方飛機在距自衛飛機25 km的攻擊區內邊界發射中距空空導彈時,自衛飛機通過機動可部分擺脫導彈攻擊,在距自衛飛機13 km的不可逃逸攻擊區中心位置發射來襲導彈時,自衛飛機僅靠機動規避無法擺脫來襲導彈的攻擊。自衛飛機采用EOTAS探測來襲導彈,采用IRST系統瞄準來襲導彈,采用IR反空空導彈攔截來襲導彈[12],對馬赫數在2.5以下的來襲導彈,有效探測距離均大于6 km,對馬赫數在3以上的來襲導彈,探測系統作用距離均大于10 km。
3.1 空戰平臺的攻擊彈道仿真
圖5~圖7為典型的迎頭攻擊態勢下,空戰仿真平臺的彈道仿真結果。
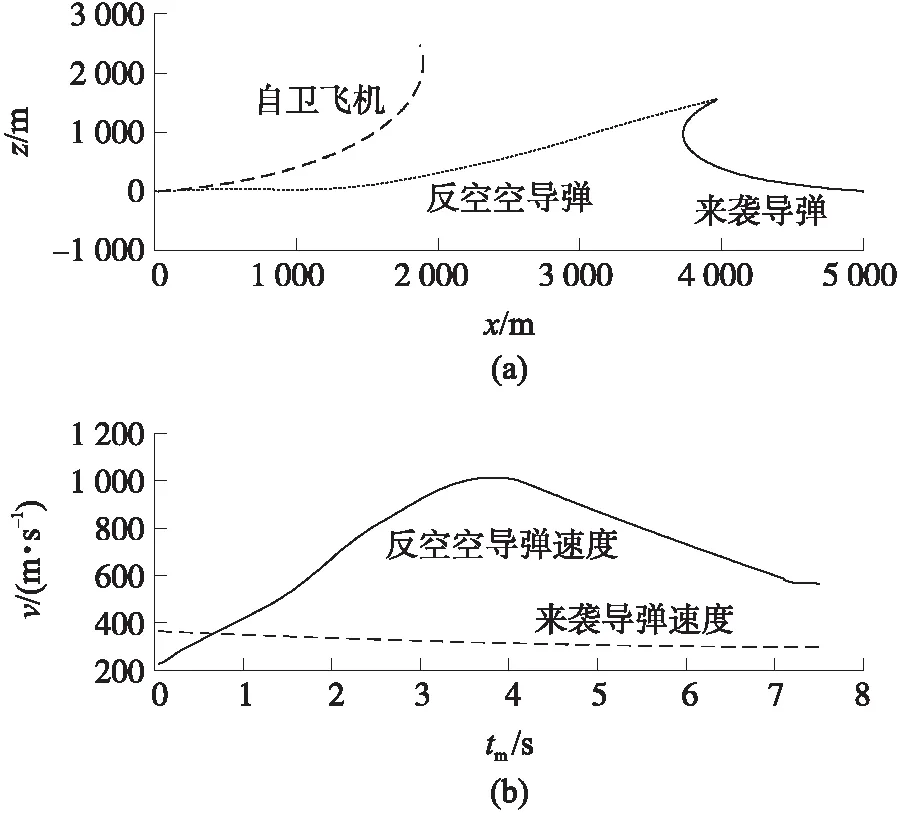
圖5 反空空導彈成功攔截邊界發射來襲導彈
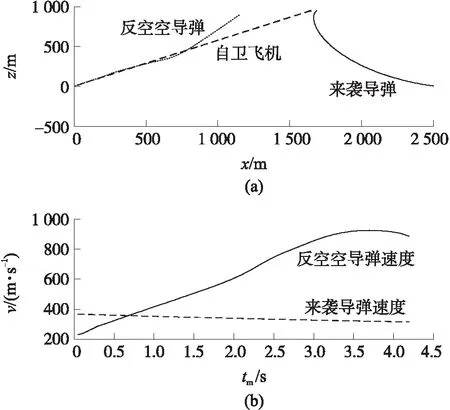
圖6 反空空導彈未成功攔截邊界發射來襲導彈
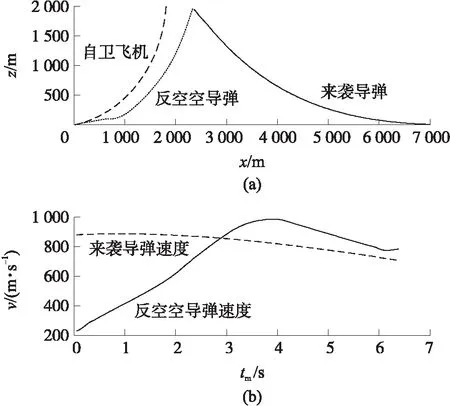
圖7 反空空導彈成功攔截中心區發射來襲導彈
圖5和圖6中的來襲導彈在25 km距離發射,自衛飛機在5 000 m距離發射反空空導彈,能夠成功攔截來襲導彈,在距來襲導彈2 500 m時發射反空空導彈,由于距離過近,未能攔截成功,來襲導彈命中自衛飛機。圖7為來襲導彈在距離13 km處發射攻擊自衛飛機,在距來襲導彈7 000 m處發射反空空導彈,成功攔截來襲導彈的飛行彈道軌跡。
3.2 反空空導彈的攔截區
為使發射的反空空導彈能夠可靠攔截來襲導彈,需要計算出來襲導彈的攔截區,以便空戰時飛行員能夠把握時機,在攻擊區內發射反空空導彈攻擊來襲導彈。圖8為計算的典型迎頭空戰態勢下,反空空導彈的攔截區。
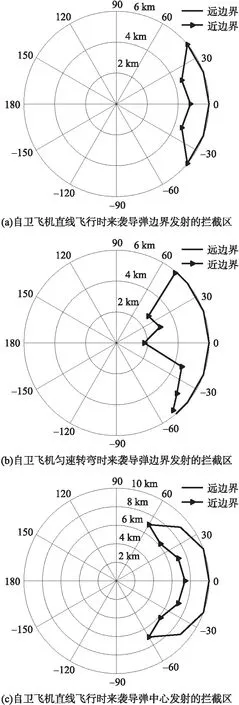
圖8 不同反空空導彈前置角下的攔截區
圖8(a)為自衛飛機不機動,來襲導彈在距自衛飛機25 km處的攻擊區遠邊界發射時,反空空導彈的可攔截區;圖8(b)為自衛飛機以5g過載機動時,反空空導彈的可攔截區;圖8(c)為自衛飛機不機動時,來襲空空導彈在距自衛飛機13 km的攻擊區中心位置被發射,反空空導彈的可攔截區。
從解算出的反空空導彈攔截區可以看出:①反空空導彈對迎頭攻擊的中遠距空空導彈存在有效攔截區。②攔截區的遠邊界主要受自衛飛機對來襲導彈的探測跟蹤距離影響,攔截區的近邊界主要受反空空導彈的性能影響,攔截區的側邊界主要受反空空導彈前置角限制。③自衛飛機的機動能夠改變攔截區形狀。④隨著來襲導彈由攻擊區邊界發射向中心發射,其到達自衛飛機時速度增加,被自衛飛機探測的距離增加,反空空導彈不可攔截距離增加,造成攔截區“外移”的現象。
4 結束語
本文建立了自衛飛機、來襲空空導彈和反空空導彈的空戰仿真平臺,著重研究了迎頭空戰態勢下反空空導彈攔截中遠距空空導彈的問題,所得結論對提高作戰飛機的自衛能力具有重要意義。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33